一种拉线式机械手臂
- 国知局
- 2024-07-08 10:48:15
本发明涉及一种机械手,具体涉及一种拉线式机械手臂,本发明属于拉线控制的机械臂领域。
背景技术:
1、常规工业机械手臂通常配置自由度少于六个,只能完成抓取、搬运、焊接或涂装等简单作业任务;由于自由度较少,避障能力差,无法满足在狭小曲路密闭空间进行探伤、检测和清洗等要求,多关节仿蛇形机械臂具有超冗余自由度,但是单个关节多采用铰链形式仅1个自由度或2个自由度形式,自由度少,失灵活性,限制了工作空间,目前还未有较好的解决方案。
技术实现思路
1、本发明的目的是为了解决现有的机械手臂只能完成抓取、搬运、焊接或涂装等简单作业任务,以及多关节仿蛇形机械臂具有超冗余自由度的问题,进而提供一种拉线式机械手臂。
2、本发明的技术方案是:
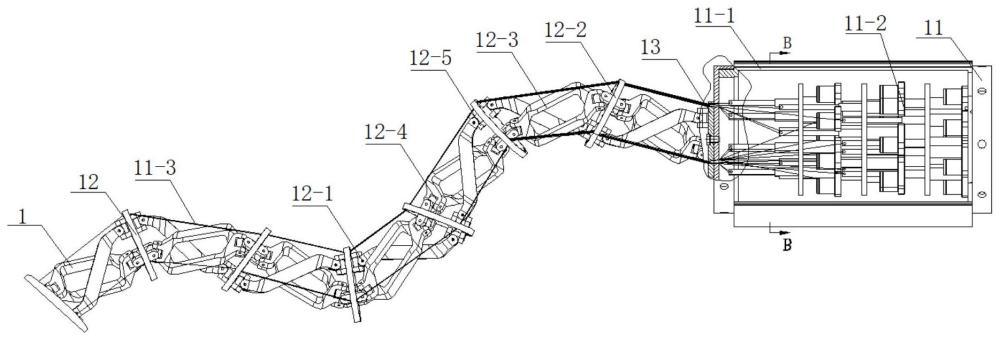
3、一种拉线式机械手臂,拉线式机械手臂为多关节蛇形机械臂;多关节蛇形机械臂包括机械臂驱动组件、机械臂关节定平台和多个机械臂关节活动组件;多个机械臂关节活动组件依次安装在机械臂驱动组件上,机械臂关节活动组件依次连接设置,且机械臂关节活动组件的末端与机械臂关节定平台连接。
4、进一步地,机械臂关节活动组件包括机械臂关节动平台、三个曲杆、多个曲杆连接件、多个连接件固定座和销轴替换销钉;每个曲杆的两端分别与一个曲杆连接件的一端转动连接,
5、曲杆上一端的曲杆连接件通过销轴替换销钉和连接件固定座与机械臂关节动平台转动连接,曲杆上另一端的曲杆连接件通过销轴替换销钉和连接件固定座与相邻机械臂关节动平台的一个端面转动连接,每个机械臂关节动平台上的曲杆连接件沿径向均布设置。
6、进一步地,机械臂关节动平台上的三个曲杆沿顺时针方向交替扭转设置。
7、进一步地,每个曲杆与与机械臂关节动平台形成十字轴连接结构。
8、进一步地,每个机械臂关节动平台上三个曲杆呈120°均部设置。
9、进一步地,机械臂驱动组件包括机械臂驱动外壳、三层推杆固定件和多个机械臂拉线;每层推杆固定件包括卡层和七个机械臂电动推杆,每个卡层上沿径向均布设有七个机械臂电动推杆,机械臂电动推杆的替换固定座与卡层固定连接,三层推杆固定件沿长度方向顺次固定连接,每个机械臂电动推杆的伸缩端与机械臂拉线的一端固定连接,每个机械臂拉线的另一端与机械臂关节动平台固定连接,每个机械臂关节动平台上均与三个机械臂电动推杆通过机械臂拉线连接,且三个机械臂拉线依次穿过经过的机械臂关节动平台的走线孔并与对应的机械臂关节动平台固定连接,三个卡层固定安装在机械臂驱动外壳上。
10、本发明与现有技术相比具有以下效果:
11、1.本申请的机械手臂用电动推杆驱动拉线控制关节组件转动,采用平铺分层式多组电动推杆集中驱动代替多个分散关节电机和减速器组件,具有结构紧凑,转动惯量低,相应快等特点;且拉线驱动组件规格统一,后置式集中布局,互换性好,易实现臂体和腿足的小型化和轻量化;
12、2.本申请的蛇形机械臂关节采用3-uu并联机构,每个并联机构即可实现任意角度转动,具有刚度高,负载能力强,控制准确等优势;模块化结构设计,可根据实际工作需求,任意增加3-uu并联机构和配备相应电动推杆数量,增加臂体自由度数量,提高其灵活性和操作空间;臂体具备成本低,易于制造等特点;
13、3.本申请的蛇形机械臂每个3-uu并联机构需要配置3根拉线,根据“三点定一面原理”,任意改变3根拉线的长短量即可调整3-uu并联机构的动平台和定平台之间的空间角度量,即n个并联机构需要配备3n个电动推杆牵引3n根拉线,3n个推杆分层交错布置,每层推杆通过基座内设置的卡层进行圆周方向固定,推杆间彼此不互相干涉和影响,确保每根电动推杆有效地输送驱动力和工作的稳定性。本发明机械臂选取7组3-uu并联机构,配备的21个电动推杆,共分3层交错布置,每层圆周布置7个电动推杆。
技术特征:1.一种拉线式机械手臂,其特征在于:拉线式机械手臂为多关节蛇形机械臂(1);多关节蛇形机械臂(1)包括机械臂驱动组件(11)、机械臂关节定平台(13)和多个机械臂关节活动组件(12);多个机械臂关节活动组件(12)依次安装在机械臂驱动组件(11)上,机械臂关节活动组件(12)依次连接设置,且机械臂关节活动组件(12)的末端与机械臂关节定平台(13)连接。
2.根据权利要求1所述一种拉线式机械手臂,其特征在于:机械臂关节活动组件(12)包括机械臂关节动平台(12-2)、三个曲杆(12-3)、多个曲杆连接件(12-4)、多个连接件固定座(12-5)和销轴替换销钉(12-1);
3.根据权利要求1所述一种拉线式机械手臂,其特征在于:机械臂关节动平台(12-2)上的三个曲杆(12-3)沿顺时针方向交替扭转设置。
4.根据权利要求1所述一种拉线式机械手臂,其特征在于:每个曲杆与(12-3)与机械臂关节动平台(12-2)形成十字轴连接结构。
5.根据权利要求1所述一种拉线式机械手臂,其特征在于:每个机械臂关节动平台(12-2)上三个曲杆(12-3)呈120°均部设置。
6.根据权利要求1所述一种拉线式机械手臂,其特征在于:机械臂驱动组件(11)包括机械臂驱动外壳(11-1)、三层推杆固定件(11-2)和多个机械臂拉线(11-3);每层推杆固定件(11-2)包括卡层(11-21)和七个机械臂电动推杆(11-22),每个卡层(11-21)上沿径向均布设有七个机械臂电动推杆(11-22),机械臂电动推杆(11-22)的替换固定座与卡层(11-21)固定连接,三层推杆固定件(11-2)沿长度方向顺次固定连接,每个机械臂电动推杆(11-22)的伸缩端与机械臂拉线(11-3)的一端固定连接,每个机械臂拉线(11-3)的另一端与机械臂关节动平台(12-2)固定连接,每个机械臂关节动平台(12-2)上均与三个机械臂电动推杆(11-22)通过机械臂拉线(11-3)连接,且三个机械臂拉线(11-3)依次穿过经过的机械臂关节动平台(12-2)的走线孔并与对应的机械臂关节动平台(12-2)固定连接,三个卡层(11-21)固定安装在机械臂驱动外壳(11-1)上。
技术总结一种拉线式机械手臂,本发明涉及一种机械手,本发明的目的是为了解决现有的机械手臂只能完成抓取、搬运、焊接或涂装等简单作业任务,以及多关节仿蛇形机械臂具有超冗余自由度的问题,一种拉线式机械手臂,拉线式机械手臂为多关节蛇形机械臂;多关节蛇形机械臂包括机械臂驱动组件、机械臂关节定平台和多个机械臂关节活动组件;多个机械臂关节活动组件依次安装在机械臂驱动组件上,机械臂关节活动组件依次连接设置,且机械臂关节活动组件的末端与机械臂关节定平台连接,本发明属于拉线控制的机械臂领域。技术研发人员:袁军,焦海坤,赵清来,陈晓明,谢哲东,杨丹,许顺,耿艳秋,范靖,黄周腾,王毓涵,李超,周佳欣受保护的技术使用者:吉林农业大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50294.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表