一种有感知功能的柔性夹爪及其夹持方法
- 国知局
- 2024-07-08 10:49:27
本发明涉及柔性末端执行器领域,具体涉及一种有感知功能的柔性夹爪及其夹持方法。
背景技术:
1、末端执行器作为机器人与外界环境进行交互并完成预定指令的组件,其输出能力、灵活性、稳定性和安全性是衡量设计水平的重要指标。刚性末端执行器在执行任务时精度高、响应速度快且可靠性优秀,但刚性部件也存在缺乏自适应性、人机交互安全性较差和难以适应复杂和特定环境的要求等问题。针对刚性机械爪的缺点,现有技术中出现了柔性机械爪作为机械臂的柔性执行末端,并逐渐成为当前工业机器人领域的研究热点。
2、柔性机械爪在医疗、地形探测和农作物采摘等领域具有广泛的应用前景。现如今,柔性机械爪在执行任务时依然存在局限性,具体表现如下:第一,无法较好地完成对不同大小和形状的农作物进行自适应的采摘的任务;第二,现有的柔性机械爪未具备良好的感知功能,如无法感知被抓取物体表面受力及其硬度情况等,导致无法根据不同的被抓取物适应性的进行控制,在抓取不同成熟度的农作物或其余易损坏物体时,容易导致被抓取物受损;第三,现有的柔性机械爪与其测量和控制的电路系统分离,导致柔性机械爪的测量和控制电路系统会对机械臂和柔性爪的位姿和运动产生干扰,未实现一体化和良好的机械随从性,不便于推广使用。
技术实现思路
1、本发明提供一种有感知功能的柔性夹爪及其夹持方法,以解决现有技术中柔性机械爪的感知功能较弱、容易导致被抓取物受损,以及爪体与电路分离导致的干涉问题,实现提高柔性机械爪的感知能力、降低被抓取物受损风险,同时便于将相关电路集成在爪体内部等目的。
2、本发明通过下述技术方案实现:
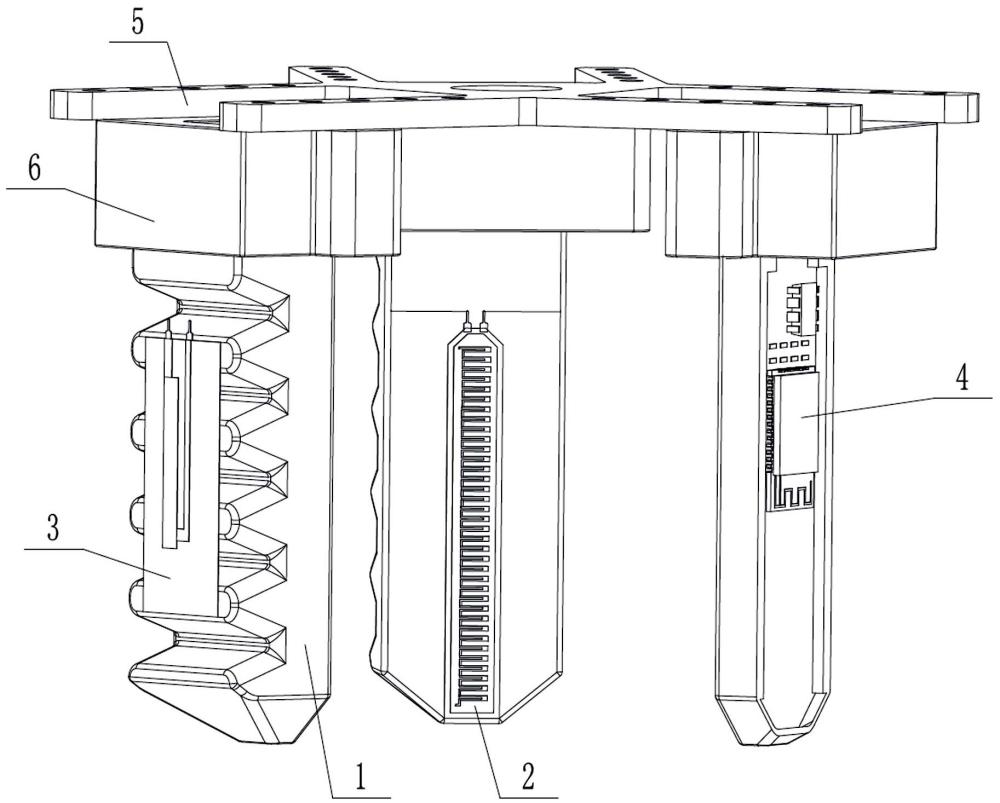
3、一种有感知功能的柔性夹爪,包括若干柔性爪体,还包括用于驱动所述柔性爪体向内弯曲的驱动机构;所述柔性爪体的内壁设置用于监测压力的柔性压力传感器,所述柔性爪体的外壁设置用于监测拉伸程度的柔性拉伸传感器;还包括位于柔性爪体内部的控制模块,所述控制模块的输入端与柔性压力传感器、柔性拉伸传感器电性连接,所述控制模块的输出端与所述驱动机构信号连接。
4、针对现有技术中柔性机械爪的感知功能较弱、容易导致被抓取物受损的问题,本技术首先提出一种有感知功能的柔性夹爪,该柔性夹爪包括若干柔性爪体,由驱动机构驱动所有的柔性爪体同时向内弯曲,即可实现对被抓取物的抓取夹持。本技术中,在柔性爪体的内壁设置柔性压力传感器、在柔性爪体的外壁设置柔性拉伸传感器;其中,柔性压力传感器用于实时监测所受到的压力,即是柔性爪体对被抓取物的抓取力的大小;柔性拉伸传感器用于实时监测柔性爪体外壁的拉伸程度,即是柔性爪体外壁发生拉伸的形变量。由于柔性爪体在工作时需整体向内弯曲,因此本技术通过柔性的压力传感器、拉伸传感器,来实现对柔性爪体的压力、形变量的实时监测;其中,对于柔性压力传感器、柔性拉伸传感器的具体材质或结构在此不做具体限定,本领域技术人员根据现有技术能够实现的、在柔性材料上可以监测压力、形变量的技术均可适用于本技术中。
5、本领域技术人员应当理解:本技术中的柔性爪体向内弯曲,是指朝向被抓取物所在的方向弯曲,即是朝向各柔性爪体围绕而成的中心方向弯曲;柔性爪体的内壁,是指柔性爪体朝向被抓取物所在的方向的一侧侧壁,即柔性爪体的抓取侧;柔性爪体的外壁,是指柔性爪体背离被抓取物所在的方向的一侧侧壁,即柔性爪体的背侧。
6、本技术在工作时,由驱动机构驱动各柔性爪体向内弯曲,使柔性爪体内壁与被夹持物接触;柔性压力传感器、柔性拉伸传感器将监测信号实时发送至控制模块;控制模块即可基于压力和拉伸程度的监测信号来判断被夹持物的硬度,并通过反馈控制算法控制所述驱动机构。
7、本技术相较于现有技术而言,使得柔性夹爪具备了良好的感知功能,能够感知被抓取物体表面受力情况,不仅可用于判断被夹持物的大小、形状等,还为判断被夹持物的硬度提供了一定范围的定量依据;并且,本技术还可通过对被抓取物的受力与硬度情况的反馈,采取反馈控制算法控制驱动机构的输出,进而可以针对不同的被夹持物适应性的进行控制,显著提高了柔性末端执行器对易损物体的抓取精度,减小了错误抓取的可能性,降低了被抓取物的受损风险,更加适用于对不同大小、形状和成熟度的农作物的自适应采摘任务;此外,由于本方案采用了大量柔性结构,便于将相关电路均集成在爪体内部,进而减少外置电路对位姿和运动产生的干扰。
8、进一步的,还包括固定板,所述固定板上连接若干安装件,所述安装件用于安装柔性爪体。
9、本方案通过固定板来安装所有的安装件,每个安装件对应的安装一个柔性爪体,使各柔性爪体在受到驱动机构控制时能够同步向内弯曲以完成抓取动作;同时通过固定板便于将本技术的柔性夹爪组装到机械臂末端或其它机械装置上的指定位置。
10、其中,固定板与安装件之间的具体连接方式、以及安装件与柔性爪体之间的具体连接方式连接,在此均不做限定,任意现有连接方式均可采用。
11、进一步的,所述柔性爪体的内壁平整,柔性爪体的外壁设置为波浪状或齿状结构;还包括位于所述柔性爪体内部的腔体,所述腔体的形状与柔性爪体的外部形状一致;所述驱动机构用于向所述腔体内充入流体。
12、本方案中,柔性爪体内部的腔体,与柔性爪体的外观形状一致,均是内壁平整、外壁为波浪状或齿状结构。本方案中的波浪状或齿状结构均为本领域技术人员能够理解的一般性限定,波浪状即是指由若干依次并排且重复的弧形所形成的结构,齿状即是指由若干依次并排且重复的凸齿所形成的结构;此类结构能够对柔性爪体的外壁产生应变限制,同时使得柔性爪体的抓取侧和背侧的弹性模量具有差异,进而限制柔性爪体向外侧方向弯曲。
13、通过驱动机构向腔体内充入流体时,在柔性爪体与腔体外壁方向的波浪状或齿状结构的作用下,从而迫使柔性爪体自动的向内侧方向弯曲。其中,驱动机构向腔体内充入的流体,可以是各种常见的气体、也可以是指定的液体,甚至是非牛顿流体等。
14、进一步的,所述柔性爪体表面开设与所述腔体连通的通道;所述驱动机构包括与所述通道连通的气源或气泵、连接在气源或气泵的输出端与所述通道之间的电磁阀。
15、本方案中,驱动机构通过气源或气泵向腔体内部充入对应的气体,由于柔性爪体的抓取侧和背侧的弹性模量具有差异,因此能够通过气压迫使柔性爪体向内弯曲。控制模块对驱动机构的控制,可通过控制电磁阀的开关程度、以此调节腔体内的气压与气体进入腔体的流速来实现。
16、进一步的,所述柔性压力传感器与所述控制模块之间包括第一分压电路、第一放大电路、第一滤波电路,所述第一滤波电路与第一分压电路并联;所述柔性拉伸传感器与所述控制模块之间包括第二分压电路、第二放大电路、第二滤波电路,所述第二滤波电路与第二分压电路并联。
17、其中,第一分压电路用于使采集到的柔性压力传感器的模拟电压信号更为稳定,第一滤波电路用于滤波,第一放大电路用于起到电压跟随同时兼顾滤波功能;
18、第二分压电路用于使采集到的柔性拉伸传感器的模拟信号更为稳定,第二滤波电路用于滤波,第二放大电路用于起到电压跟随同时兼顾滤波功能。
19、本方案中,各分压电路、放大电路与滤波电路,均可采用现有电路实现,仅需满足各自对应的分压、信号放大、滤波等功能即可。
20、进一步的,所述柔性压力传感器监测的压力值通过如下公式计算:
21、;
22、式中: f为柔性压力传感器监测的压力值; v cc为向柔性压力传感器供电的电源电压; v为第一分压电路上的电压; r为第一分压电路的电阻; g为条件判据,取 g=106/ r。
23、本方案明确限定了控制模块如何将柔性压力传感器的监测信号转换为柔性压力传感器监测的压力值;其中在各电路元件确定的前提下, r、 g、 v cc均为定值,控制模块接收第一放大电路的信号,得到第一分压电路上的电压 v,将 v值代入本方案公式中,即可得到所需的压力值。
24、进一步的,所述第一分压电路、第一放大电路、第一滤波电路、第二分压电路、第二放大电路和第二滤波电路,均通过导电油墨实现电性连接,并封装在第一柔性拉伸基底内;所述第一柔性拉伸基底位于柔性爪体内部。
25、由于本技术的柔性爪体在工作时需要整体发生弯曲,如何将对应的传感器电路内置在柔性爪体内部是技术难题之一;现有技术中,正是由于难以将相关线路内置在末端执行器的爪体内部,才会导致柔性机械爪与其测量和控制系统分离外置,进而导致相关分离并外置的电路对机械臂和柔性爪的位姿和运动产生干涉。
26、为了克服上述缺陷,本方案特将各电路均封装在第一柔性拉伸基底内,再整体内置在柔性爪体内部。各电路内部的电导通、以及相接的电路之间的电导通,均通过导电油墨实现。
27、本方案可有效将对应的传感器电路内置在柔性爪体内部形成柔性电路,集成性极强、系统结构得到了明显简化,显著减少了刚性连接部件,提高了柔性末端执行系统的工作稳定性和可靠性。本方案所使用的柔性电路,能够随柔性爪体的弯曲而同步弯曲、同时保证电路完整性和稳定性,进而避免了本技术的柔性爪体与其测量系统的分离、避免了外置电路对柔性爪体的位姿和运动造成干涉,显著提高了柔性夹爪的机械随从性、提高了柔性夹爪的一体化程度。
28、进一步的,所述柔性拉伸传感器包括附着在柔性爪体外壁的第二柔性拉伸基底、设置在第二柔性拉伸基底上的力敏变阻片、分别与力敏变阻片两端电性连接的两个接线端。
29、本方案通过第二柔性拉伸基底为柔性拉伸传感器提供随柔性爪体同步弯曲的能力;当第二柔性拉伸基底随柔性爪体同步弯曲时,力敏变阻片受拉力作用,通过监测力敏变阻片的阻值变化,来识别柔性爪体的拉伸程度,进而为判断被抓取物的硬度、对驱动机构的反馈控制等,均提更为准确且实时的依据。
30、进一步的,所述柔性拉伸传感器监测的拉伸程度通过如下公式计算:
31、r0=25×ln(( x+1)/1.62)+18;
32、式中:r0为力敏变阻片的实时电阻; x为柔性拉伸传感器的拉伸长度。
33、一种有感知功能的柔性夹爪的夹持方法,包括:
34、由驱动机构驱动各柔性爪体向内弯曲,使柔性爪体内壁与被夹持物接触;
35、柔性压力传感器、柔性拉伸传感器将监测信号实时发送至控制模块;
36、控制模块基于压力和拉伸程度的监测信号,判断被夹持物的硬度,并基于反馈控制算法控制所述驱动机构。
37、本方法中,判断被夹持物的硬度,可单独通过柔性压力传感器的监测结果判断、也可单独通过柔性拉伸传感器的监测结果判断、还可结合柔性压力传感器与柔性拉伸传感器的监测结果判断总和判断,其具体的判断逻辑在此不做限定,可采用提前对被夹持物进行标定、根据监测结果所处的数值区间进行硬度分类等诸多方式实现。此外,其中的反馈控制算法,可采用任意现有反馈控制算法实现,本技术在此同样不做具体限定。
38、可以看出,本方案通过对柔性爪体压力和形变位移的实时监测,从而能够以一定范围的定量方式准确判断被夹持物的硬度、大小等特征,提高了精准抓取和无损抓取能力,大大提高了抓取的精度和效率,有效降低了错误抓取和损坏被夹持物的风险。
39、本发明与现有技术相比,具有如下的优点和有益效果:
40、1、本发明一种有感知功能的柔性夹爪及其夹持方法,使得柔性夹爪具备了良好的感知功能,能够感知被抓取物体表面受力情况,不仅可用于判断被夹持物的大小、形状等,还为判断被夹持物的硬度提供了一定范围的定量依据。
41、2、本发明一种有感知功能的柔性夹爪及其夹持方法,通过对被抓取物的受力与硬度情况的反馈,采取反馈控制算法控制驱动机构的输出,进而可以针对不同的被夹持物适应性的进行控制,显著提高了柔性末端执行器对易损物体的抓取精度,减小了错误抓取的可能性,降低了被抓取物的受损风险。
42、3、本发明一种有感知功能的柔性夹爪及其夹持方法,可有效将对应的传感器电路内置在柔性爪体内部形成柔性电路,集成性极强、系统结构得到了明显简化,显著减少了刚性连接部件,提高了柔性末端执行系统的工作稳定性和可靠性。
43、4、本发明一种有感知功能的柔性夹爪及其夹持方法,所形成的柔性电路能够随柔性爪体的弯曲而同步弯曲、同时保证电路完整性和稳定性,进而避免了本技术的柔性爪体与其测量系统的分离、避免了外置电路对柔性爪体的位姿和运动造成干涉,显著提高了柔性夹爪的机械随从性。
44、5、本发明一种有感知功能的柔性夹爪及其夹持方法,尤其适用于对农作物的自适应采摘作业,可满足不同大小、形状和成熟度的农作物的采摘需求,还可应用于对不同成熟度的农作物的自动分拣。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50400.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表