一种考虑非线性形变的柔性液压机械臂虚拟分解控制方法
- 国知局
- 2024-07-08 10:49:15
本发明涉及柔性液压机械臂控制,具体涉及一种考虑非线性形变的柔性液压机械臂虚拟分解控制方法。
背景技术:
1、柔性液压机械臂是一种具有高度灵活性和适应性的机械臂系统,由多个连杆和关节组成,通过液压驱动来实现运动。与传统刚性机械臂相比,柔性液压机械臂对复杂的工作环境有更强的适应性。
2、为确保在复杂环境下的稳定性和准确性,柔性液压机械臂对精度也有更高的要求。通过高精度的位置控制,柔性液压机械臂能够实现精确的定位和运动,从而展现出卓越的性能。精准的位置控制不仅能提高生产效率,还可以降低人员伤害和错误率。
3、然而,由于柔性液压机械臂的液压执行器与关节构成闭链结构,导致线性执行器输出力和臂架重力产生耦合,使机械臂在进行精确定位和运动控制时可能会受到耦合的影响。目前已经有授权的液压机械臂控制方法,例如专利公开号为cn114536338,名为一种液压机械臂的控制方法,但此种控制方法并未对液压机械臂特有的闭链结构细致分析,无法实现液压机械臂的高精度控制,因此亟需一种闭链关节解耦的控制方法。
4、同时,连杆和关节的形变可能会导致位置误差、姿态偏差和运动不稳定等问题,影响机械臂的精度和性能。目前已经有授权的臂架形变量确定方法,例如专利公开号为cn114777726,名为臂架的形变量确定方法、装置、臂架系统及工程机械设备,但此方法需要多个位移传感器、压力传感器和倾角传感器,计算成本高,迫切需要一种低成本的形变补偿方法。
5、为了解决液压机械臂耦合和臂架形变测量成本高的问题,提出一种考虑非线性形变的柔性液压机械臂虚拟分解控制方法。旨在通过感知和分析机械臂的形变情况,并采取相应的控制策略来实现精确的姿态控制和运动跟踪。
技术实现思路
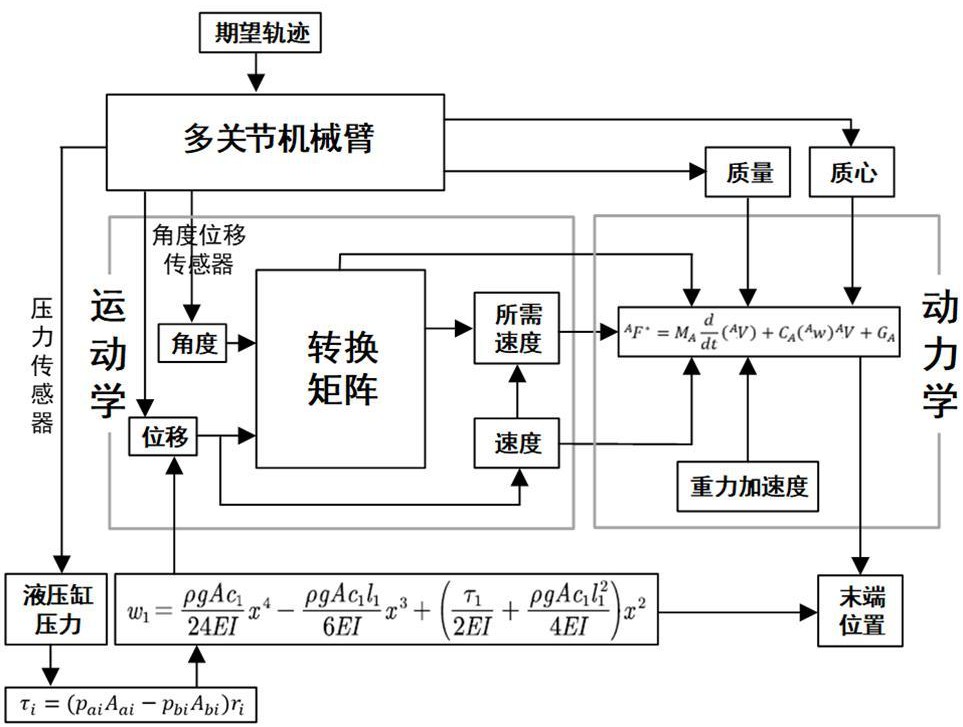
1、为此,本发明公开了一种考虑非线性形变的柔性液压机械臂虚拟分解控制方法,其方法包括:首先对多关节柔性液压机械臂系统切割,将系统切分为多模块子系统,实现多关节之间的臂杆解耦,再对切割得到的转动闭链进行二次切割,液压缸与臂杆切分为驱动链和非驱动链,实现闭链结构的解耦,每个子系统之间通过虚拟功率流保证整体的稳定性;最后,由臂架形变曲线求出运动过程中臂架上各点形变量,同时根据圆弧形变理论得出形变量和相邻坐标系之间转角的关系,可计算出柔性液压机械臂形变产生的位置偏移量与补偿量,实现实时形变补偿,提高末端定位精度。
2、一种考虑非线性形变的柔性液压机械臂虚拟分解控制方法,其特征在于,包括以下步骤:
3、步骤1,针对柔性液压机械臂强耦合、弱刚度和定位不准等问题,切割柔性液压机械臂系统,将多关节之间解耦,建立多关节子系统运动学传递模型;同时对转动闭链关节再次切割得到驱动开链和非驱动开链,分别建立传递模型,得到系统的运动学传递矩阵 u,再将末端负载力逆向传递,求出每个子坐标系所需合力/力矩矢量 f r大小;
4、步骤2,通过虚拟功率流(vpf),在各个子系统之间实现动态交互,同时保证整体系统的虚拟稳定性;
5、步骤3,通过液压缸两端的压力传感器测得进出口压力和,求出液压缸对外输出力 f的大小,各子系统重心简化施加在质心处,得到关节驱动力矩 τ;
6、步骤4,将每一节臂段都简化为位姿与关节角度有关的受压弯组合变形的悬臂梁模型,可求出各臂架的变形曲线方程,其中关节角度由角度编码器测出;
7、步骤5,根据步骤3和步骤4的关节驱动力矩和臂架形变曲线方程计算出臂架上各点形变量;
8、步骤6,根据步骤5中的臂架形变量,结合圆弧形变曲线方程计算出臂架变形后相邻坐标系原点的直线距离,得到多关节机械臂末端坐标,实现运动学补偿;
9、步骤7,根据步骤5中得到的臂架形变量和步骤6中得到的末端坐标对步骤1的运动学传递矩阵 u修改,进而对动力学所需力 f r进行补偿,最终实现对末端位置的实时补偿;
10、进一步地,步骤1中所述的运动学传递矩阵 u具体如下,以坐标系 {a}和坐标系 {b}为例:
11、,
12、,
13、其中,为坐标系 {a}到坐标系 {b}的旋转矩阵,是斜对称矩阵算子,、和分别表示坐标系 {a}的原点到坐标系 {b}的原点之间距离在坐标系 {a}的x,y和z轴的分量。
14、根据权利要求1所述的一种考虑非线性形变的柔性液压机械臂虚拟分解控制方法,其特征在于,步骤1中所述的各子坐标系合力/力矩矢量,以 {a}子系统为例:
15、,
16、其中为科里奥利项和离心项的矩阵,为刚体的重力项,是系统的质量矩阵, 是子系统 {a}的力向量。
17、进一步地,步骤2中所述的虚拟功率流保证整体的虚拟稳定性。
18、,
19、其中选取单个非负伴随函数为:
20、,
21、其中,为子坐标系 {α}所需速度向量。
22、令旋转段和棱镜段的非负伴随函数为:
23、,
24、,
25、结合旋转截面和棱柱截面的动力学方程,时间导数为:
26、
27、,
28、因此,它表明了第 j个机械臂结构的虚拟稳定性,进而也表明了整个机械臂的虚拟稳定性。
29、进一步地,步骤3中所描述的液压缸对外输出力 f i的大小为:
30、,
31、其中,和是分别是由压力传感器测得的液压缸进出口两端压力大小,和分别是液压缸有杆腔和无杆腔的横截面积。
32、进一步地,步骤3中将重心简化到质心处,得到的关节驱动力矩 τ为:
33、,
34、其中 r是臂杆的力臂长度。
35、进一步地,步骤4中所述与关节角度相关的臂架变形曲线方程为:
36、,
37、其中 x是指臂架上的任意距离, w是相应臂架对应点形变量, ρ是臂架等效密度, a是等效横截面积。结合步骤3和步骤4得出的关节驱动力矩和变形曲线方程可计算出臂架实时形变量。
38、进一步地,步骤6中提到了圆弧形变曲线为:
39、,
40、其中,是从矩阵中提取出来的圆弧角度,曲率半径为:
41、,
42、几何余弦定理可得:
43、,
44、其中,是臂架自身长度,是臂架形变后的相邻坐标系距离,是由固定在每个臂杆首端的角度编码器测得。得到每个臂杆形变后长度即可求出柔性机械臂末端相对基座的位置坐标,为:
45、,
46、,
47、进一步地,步骤7中使用求得的臂架形变量和末端坐标对运动学传递矩阵 u修改,进而对动力学所需力 f r进行补偿,最终实现对末端位置的实时补偿。以坐标系 {a}和坐标系 {b}为例:
48、,
49、对动力学的力/力矩补偿后为:
50、,
51、其中,是 {b}子系统自身净力,末端坐标系 {t}负载力/力矩变为:
52、,
53、,
54、其中,是末端角度,表示顶端斜率,如下:
55、,
56、本发明的有益效果:
57、(1)本发明提出虚拟分解控制方法,通过对多关节机械臂的臂架和关节切割,得到多模块子系统,降低机械臂杆和关节之间耦合,提升定位精度;同时再引入虚拟功率流,保证整体稳定性。
58、(2)本发明提出一种考虑形变补偿的多关节液压机械臂虚拟分解控制方法,使用臂架形变曲线方程和圆弧形变理论实时计算形变量和偏移角,在虚拟分解控制基础上,进一步提升末端控制精度。
59、(3)本发明提出的柔性液压机械臂形变补偿方法,通过机械臂关节处的角度编码器测得关节转角,再结合臂架形变方程得到每个位置处的形变量,实现在低成本条件下臂架形变补偿。
本文地址:https://www.jishuxx.com/zhuanli/20240617/50386.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表