一种基于几何PID控制的移动式二自由度机械臂控制方法及系统
- 国知局
- 2024-07-08 10:49:06
本发明属于机器人控制,具体涉及一种基于几何pid控制的可移动式二自由度机械臂的控制方法及系统。
背景技术:
1、随着自动化和智能化技术的发展,机械臂已经成为工业制造、智能建造、医疗手术、服务机器人等领域不可或缺的设备。如面向建造领域,可移动式二自由度机械臂具有较好的灵活性和适应性,其可应用于复杂环境下的构件装配、打印以及混凝土浇筑等任务。然而,如何提高这类机械臂的控制精度和稳定性来满足不断增长的任务需求,成为了当前研究的关键问题。
2、传统的pid控制方法在许多简单系统中表现良好,然而在面向大尺度、非结构化以及时变环境和高精度作业任务时,可移动式二自由度机械臂系统往往存在位姿误差、响应延迟和振荡等问题,且参数选取困难,机械臂模型的物理信息未能在控制器设计中得到运用,物理意义不够明确。
技术实现思路
1、为解决上述问题,本发明提供了一种基于几何pid控制的移动式二自由度机械臂的控制方法及系统
2、本发明采用以下技术方案:
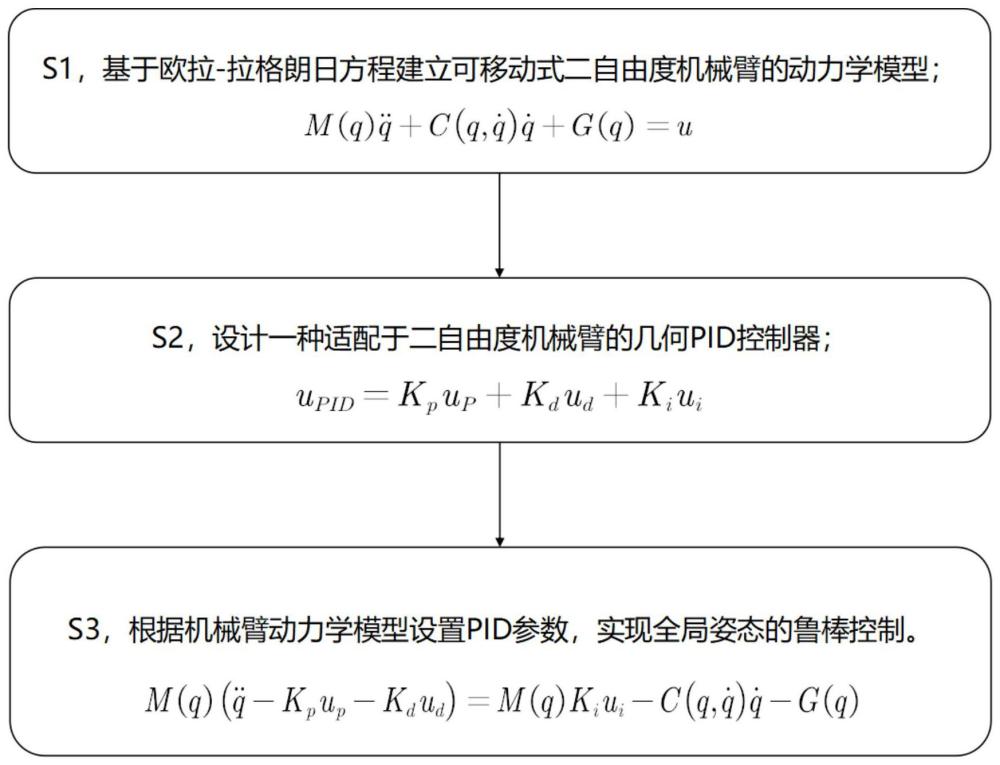
3、一种基于几何pid控制的移动式二自由度机械臂的控制方法,包括如下步骤:
4、s1,基于欧拉-拉格朗日方程建立移动式二自由度机械臂的动力学模型;
5、s2,设计适配二自由度机械臂的几何pid控制器;
6、s3,根据机械臂的动力学模型设置pid参数,实现全局姿态的鲁棒控制。
7、作为优选,步骤s1中,设小车质量为m,小车的水平位移为x;大臂(连接基底)和小臂(连接执行器装置)的质量分别为m1,m2;大臂和小臂与竖直方向的夹角分别为θ1,θ2;大臂和小臂的长度分别为2l1,2l2,其质心到达关节处的距离分别为l1,l2,双臂质量分布均匀,关节处电机质量忽略不计。
8、小车动能为:
9、
10、大臂动能为:
11、
12、小臂动能为:
13、
14、可移动式二自由度机械臂系统的重力势能为:
15、v=m1gl1cosθ1+m2g(2l1cosθ1+l2cosθ2)
16、拉格朗日算子为:
17、l=t-v
18、=t0+t1+t2-v
19、代入欧拉-拉格朗日方程:
20、
21、作为优选,步骤s1中,代入欧拉-拉格朗日方程化简后可得:
22、
23、
24、
25、作为优选,s1中,所述的动力学方程写为矩阵形式为:
26、
27、其中,q=[x,θ1,θ2]t是被控对象向量,u=[f,u1,u2]t是施加在机械臂上的力,f为施加在小车上的水平力,u1,u2分别是加载机械臂关节上的扭矩向量。惯性矩阵m(q)、科氏力和离心力矩阵和重力矩阵g(q)为:
28、
29、
30、
31、作为优选,步骤s2,几何pid控制器设计为:
32、u=m(q)upid
33、将几何pid控制器代入动力学方程中得到:
34、
35、其中,作为扰动项,且有界。
36、作为优选,步骤s2中:
37、upid=kpup+kdud+kiui
38、其中,kp,kd,ki分别是比例增益矩阵、微分增益矩阵和积分增益矩阵;比例控制up根据机械臂的位姿误差控制力矩,微分控制ud根据机械臂的速度误差控制力矩,抑制机械臂振荡;积分控制ui根据机械臂的累积位置误差控制力矩,消除稳态误差。
39、作为优选,步骤s2中,参数up,ud和ui作为机械臂的实际位置与期望位置之间的误差,包括线性位置误差和角度误差,表达式分别为:
40、up=[xd-x,sin(θ1d-θ1),sin(θ2d-θ2)]t
41、
42、ui=∫(up+ui)dt
43、其中,xd,θ1d和θ2d分别为机械臂的期望位置、大臂夹角和小臂夹角。
44、作为优选,将几何pid控制器代入步骤s2中的动力学方程得到:
45、
46、其中,m(q)kiui抵消扰动项即式子可以简化为:
47、
48、化为标准的二阶线性形式为:
49、
50、其中,qd是期望的位姿态向量。
51、作为优选,步骤s3中,当机械臂系统稳定时,则其特征方程为:
52、λ2+kdλ+kp=0
53、根据韦达定理,阻尼比和自然频率的关系,得到:
54、kp>0,kd>0
55、
56、本发明还公开了一种基于几何pid控制的移动式二自由度机械臂的控制系统,基于上述方法,包括如下模块:
57、动力学模型建立模块:基于欧拉-拉格朗日方程建立移动式二自由度机械臂的动力学模型;
58、几何pid控制器设计模块:设计适配二自由度机械臂的几何pid控制器;
59、全局姿态控制模块:根据机械臂的动力学模型设置pid参数,实现全局姿态的鲁棒控制。
60、本发明与现有技术相比,具有如下优势:
61、1.物理意义明确:本发明基于欧拉-拉格朗日方程建立具有完整约束系统的动力学模型,能够精准控制机械臂系统的姿态和运动轨迹;
62、2.参数选择简单:基于上述建立的动力学模型,本发明设计的几何pid控制器可以通过选取kp,kd,ki参数直接调节控制系统的稳定输出,具有参数化简单、易选择的特点;
63、3.鲁棒性强:本发明通过积分控制,有效抵消机械臂动力学系统扰动项的干扰和未考虑的不确定性建模因素,具有较好的鲁棒性。
技术特征:1.一种基于几何pid控制的移动式二自由度机械臂的控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于几何pid控制的移动式二自由度机械臂的控制方法,其特征在于,步骤s1中,设小车质量为m,小车的水平位移为x,水平速度为大臂和小臂的质量分别为m1,m2;大臂和小臂与竖直方向的夹角分别为θ1,θ2,角速度分别为大臂和小臂的长度分别为2l1,2l2,质心到达关节处的距离分别为l1,l2,重力加速度为g,双臂质量分布均匀;
3.根据权利要求2所述的一种基于几何pid控制的移动式二自由度机械臂的控制方法,其特征在于,步骤s1中,代入欧拉-拉格朗日方程化简后得:
4.根据权利要求3所述的一种基于几何pid控制的移动式二自由度机械臂的控制方法,其特征在于,步骤s1中,所述动力学模型的矩阵形式为:
5.根据权利要求4所述的一种基于几何pid控制的移动式二自由度机械臂的控制方法,其特征在于,步骤s2中,几何pid控制器设计为:
6.根据权利要求5所述的一种基于几何pid控制的移动式二自由度机械臂的控制方法,其特征在于:步骤s2中:
7.根据权利要求6所述的一种基于几何pid控制的移动式二自由度机械臂的控制方法,其特征在于,步骤s2中,up,ud和ui计算机械臂的实际位置与期望位置之间的差,包括线性位置误差和角度误差,表达式分别为:
8.根据权利要求7所述的一种基于几何pid控制的移动式二自由度机械臂的控制方法,其特征在于,将几何pid控制器代入步骤s2的动力学模型得到:
9.根据权利要求8所述的一种基于几何pid控制的移动式二自由度机械臂的控制方法,其特征在于:步骤s3中,当机械臂稳定状态时,则特征方程为:
10.一种基于几何pid控制的移动式二自由度机械臂的控制系统,基于权利要求1-9任一项所述的方法,其特征在于,包括如下模块:
技术总结本发明属于机器人控制技术领域,具体涉及一种基于几何PID控制的移动式二自由度机械臂的控制方法及系统。方法包括如下步骤:S1,基于欧拉‑拉格朗日方程建立移动式二自由度机械臂的动力学模型;S2,设计适配二自由度机械臂的几何PID控制器;S3,根据机械臂的动力学模型设置PID参数,实现全局姿态的鲁棒控制。本发明基于机械臂的质量、长度等参数设计基于几何PID控制器,该控制器包括比例项、积分项和微分项,用于控制机械臂的位置和姿态。本发明能够实现移动式二自由度机械臂的全局稳定控制,具有精度高、稳定性强、参数设置简单等优点。技术研发人员:方苗旭,徐振,于卓灵,谭平,杨谢乐,张景贻受保护的技术使用者:浙江科技大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50371.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表