一种直升机中异形曲面配件的装配机器人及装配方法
- 国知局
- 2024-07-08 10:50:13
本发明涉及配件装配,尤其涉及一种直升机中异形曲面配件的装配机器人及装配方法。
背景技术:
1、在大型直升机风挡玻璃和机舱门等包括异形曲面的配件的装配过程中,比如风挡玻璃的装配过程中,传统装配由工人操纵装配机器人的机械臂夹取风挡玻璃直接对准安装到直升机骨架。对准过程中,由于风挡玻璃与骨架的接触面属于异形的复杂曲面,特别是风挡玻璃还属于高亮的复杂曲面,通过机械臂夹持的相机确定风挡玻璃的位置时,相机拍摄到的风挡玻璃的图像不清晰,导致不能准确判断风挡玻璃的位置和姿势,进而导致机械臂夹取风挡玻璃失败或者对风挡玻璃产生破坏。
2、另外,在风挡玻璃直接对准安装到直升机骨架的过程中,由于风挡玻璃或者直升机骨架上存在一些缺陷(比如装配孔位的形状不对应、存在形变、不正常的突起等),会导致安装过程中产生接触应力,导致风挡玻璃损坏,即使安全安装到直升机骨架上,也可能在之后直升机的使用过程中,由于接触应力导致风挡玻璃损坏,十分不安全。
3、基于此,本发明提出了一种直升机中异形曲面配件的装配机器人及装配方法来解决上述技术问题。
技术实现思路
1、本发明描述了一种直升机中异形曲面配件的装配机器人及装配方法,能够减少装配过程中配件损坏。
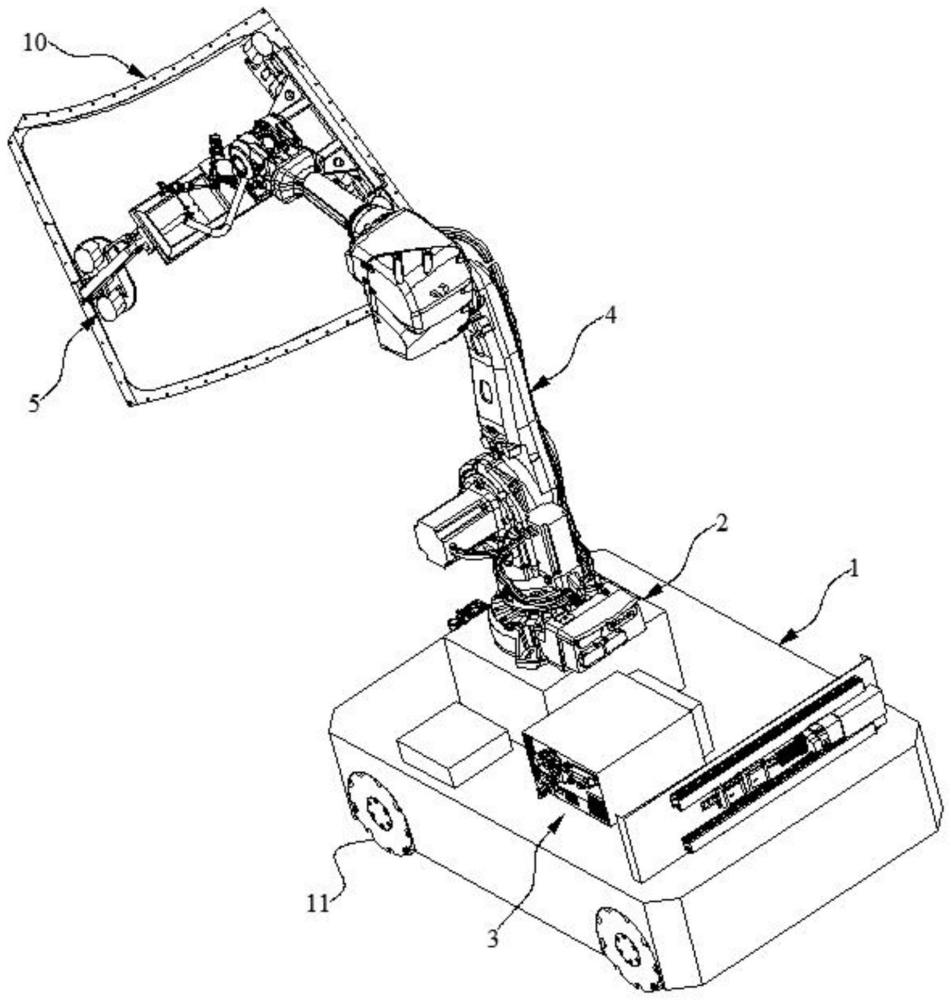
2、根据第一方面,本发明提供了一种直升机中异形曲面配件的装配机器人,包括移动底盘、设置于所述移动底盘中两个对角处的激光传感器、设置于所述移动底盘上的升降机构、设置于所述移动底盘上的控制器、设置于所述升降机构上的机械臂、设置于所述机械臂上的深度相机和3d扫描仪、设置于所述机械臂末端的六维力传感器和夹具,所述夹具与外部的空压机连接,所述控制器分别与所述移动底盘、所述激光传感器、所述升降机构、所述机械臂、所述深度相机、所述力传感器和所述空压机电连接;
3、所述移动底盘用于移动装配机器人的位置,所述激光传感器用于定位装配机器人的工作位置,所述升降机构用于改变所述机械臂的高度,所述深度相机用于拍摄目标配件和目标骨架的照片,所述3d扫描仪用于扫描所述目标配件和所述目标骨架的轮廓,所述六维力传感器用于检测所述机械臂末端的接触应力,所述夹具用于夹取所述目标配件,所述目标配件包括异形曲面配件。
4、根据第二方面,本发明提供了一种直升机中异形曲面配件的装配方法,应用于装配机器人的控制器,所述装配机器人为上述实施例所述的装配机器人,包括:
5、依据待装配的目标配件和目标骨架分别对应的边缘特征,分别确定对所述目标配件和所述目标骨架进行扫描的规划扫描路径;其中,所述目标配件包括异形曲面配件;
6、按照所述规划扫描路径对所述目标配件和所述目标骨架进行扫描,基于得到的扫描结果建立所述目标配件对应的第一模型、以及所述目标骨架对应的第二模型;
7、将所述第一模型和所述第二模型进行比对,基于比对结果预测所述目标配件和所述目标骨架进行装配时的接触应力分布图;
8、根据所述接触应力分布图使用装配机器人,将所述目标配件装配至所述目标骨架。
9、根据本发明提供的直升机中异形曲面配件的装配机器人及装配方法,通过设置移动底盘,可以移动装配机器人的位置;通过设置激光传感器,可以定位装配机器人的工作位置;通过设置升降机构,可以改变机械臂的高度;通过设置深度相机,可以拍摄目标配件和目标骨架的照片;通过设置3d扫描仪,可以扫描目标配件和目标骨架的轮廓;通过设置六维力传感器,可以检测机械臂末端的接触应力;通过设置夹具,可以夹取目标配件;通过设置控制器,可以预测目标配件和目标骨架进行装配时的接触应力分布图,使得工人在装配目标配件到目标骨架之前,可以根据接触应力分布图使用装配机器人进行装配,提前避免接触应力过大导致目标配件损坏。
技术特征:1.一种直升机中异形曲面配件的装配机器人,其特征在于,包括移动底盘、设置于所述移动底盘中两个对角处的激光传感器、设置于所述移动底盘上的升降机构、设置于所述移动底盘上的控制器、设置于所述升降机构上的机械臂、设置于所述机械臂上的深度相机和3d扫描仪、设置于所述机械臂末端的六维力传感器和夹具,所述夹具与外部的空压机连接,所述控制器分别与所述移动底盘、所述激光传感器、所述升降机构、所述机械臂、所述深度相机、所述力传感器和所述空压机电连接;
2.根据权利要求1所述的装配机器人,其特征在于,所述移动底盘包括位于四个对角处的麦克纳姆轮。
3.根据权利要求1所述的装配机器人,其特征在于,所述升降机构包括相互连接的滚珠丝杠和电机,所述滚珠丝杠的末端与所述机械臂连接。
4.根据权利要求1所述的装配机器人,其特征在于,所述夹具包括相互连接的调节座和吸盘,所述吸盘用于吸取所述目标配件,所述调节座用于调节所述吸盘俯仰方向的角度,以使所述吸盘与所述目标配件的表面垂直。
5.根据权利要求4所述的装配机器人,其特征在于,所述调节座设置有弧形孔,通过所述弧形孔调节所述吸盘俯仰方向的角度。
6.一种直升机中异形曲面配件的装配方法,其特征在于,应用于装配机器人的控制器,所述装配机器人为权利要求1-5中任一项所述的装配机器人,包括:
7.根据权利要求6所述的装配方法,其特征在于,所述边缘特征的获取方法包括:
8.根据权利要求7所述的方法,其特征在于,依据待装配的目标配件和目标骨架分别对应的边缘特征,分别确定对所述目标配件和所述目标骨架进行扫描的规划扫描路径,包括:
9.根据权利要求6所述的方法,其特征在于,将所述第一模型和所述第二模型进行比对之前,所述方法还包括:
10.根据权利要求9所述的方法,其特征在于,根据所述各缺陷位置的形位误差和对应的预测接触应力,建立所述形位误差和接触应力之间的映射方程,包括:
技术总结本发明涉及配件装配技术领域,尤其涉及一种直升机中异形曲面配件的装配机器人及装配方法。该装配机器人包括移动底盘、激光传感器、升降机构、控制器、机械臂、深度相机和3D扫描仪、六维力传感器和夹具,夹具与外部的空压机连接;移动底盘用于移动装配机器人的位置,激光传感器用于定位装配机器人的工作位置,升降机构用于改变机械臂的高度,深度相机用于拍摄目标配件和目标骨架的照片,3D扫描仪用于扫描目标配件和目标骨架的轮廓,六维力传感器用于检测机械臂末端的接触应力,夹具用于夹取目标配件,目标配件包括异形曲面配件。上述技术方案能够减少装配过程中配件损坏。技术研发人员:嵇建成,龚涛,张瑞强,张俊起,甘增康,梁召峰,陈伟受保护的技术使用者:深圳职业技术大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240617/50493.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表