一种用于机器人示教的方法及装置与流程
- 国知局
- 2024-07-08 10:57:40
本发明涉及图像处理,尤其涉及一种用于机器人示教的方法及装置。
背景技术:
1、在中国制造业产业升级的大趋势下,机器人替代人工的自动化产线已经在逐步普及,机器人的使用量也以指数级每年递增。2022年全球机器人市场规模达到513亿美元,2017-2022年的年均增长率达到14%。我国机器人市场规模达到174亿美元(约1250亿人民币),近五年的年均增长率达到22%。中国已成为全球机器人最大的应用市场。2022年中国机器人产业营业收入超1700亿元人民币。工业机器人装机量占全球比重超50%,稳居全球第一大工业机器人市场,制造业机器人密度达到每万名工人392台。服务、特种机器人产量也快速增长,在物流、医疗、建筑等领域实现规模化应用。而在机器人使用的领域,机器人是示教方式也日渐丰富,有程序示教,示教器示教,拖动示教,实际轨迹模拟示教等,但这些示教方式依然要求技术人员有较高的专业度,且示教都需要在现场操作。因此,提供一种用于机器人示教的方法及装置,以提高示教过程图像识别精准度和效率,进而实现可视化示教及远程可视化示教。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种用于机器人示教的方法及装置有利于提高示教过程图像识别精准度和效率,进而实现可视化示教及远程可视化示教。
2、为了解决上述技术问题,本发明实施例第一方面公开了一种用于机器人示教的方法,方法包括:
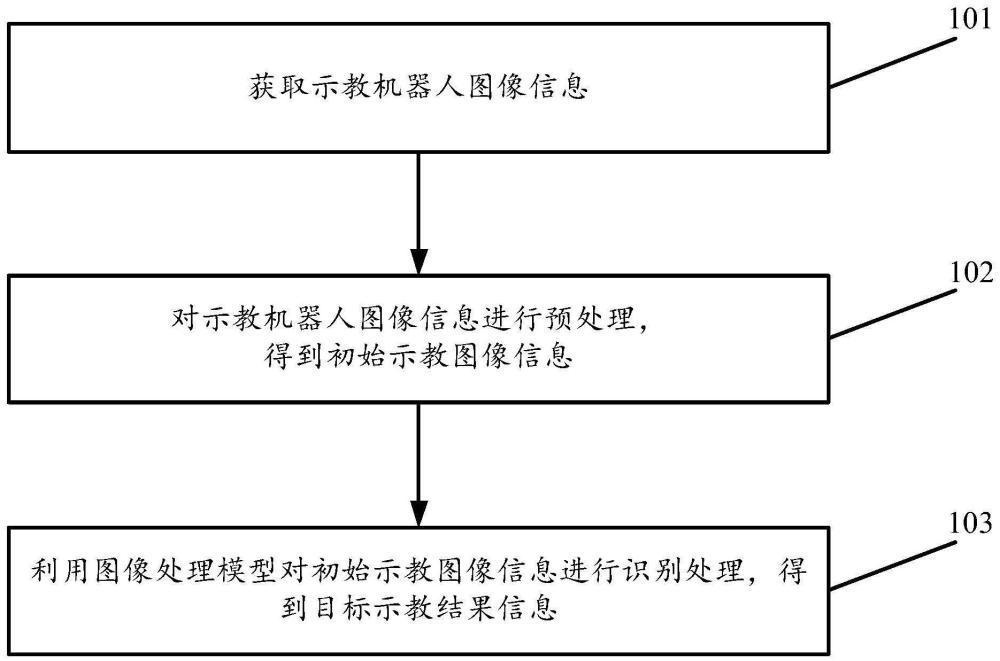
3、获取示教机器人图像信息;
4、对所述示教机器人图像信息进行预处理,得到初始示教图像信息;所述初始示教图像信息包括若干张第一示教机器人图像信息;
5、利用图像处理模型对所述初始示教图像信息进行识别处理,得到目标示教结果信息;所述目标示教结果信息包括若干个目标示教机器人识别信息。
6、本发明实施例第二方面公开了一种用于机器人示教的装置,装置包括:
7、获取模块,用于获取示教机器人图像信息;
8、第一处理模块,用于对所述示教机器人图像信息进行预处理,得到初始示教图像信息;所述初始示教图像信息包括若干张第一示教机器人图像信息;
9、第二处理模块,用于利用图像处理模型对所述初始示教图像信息进行识别处理,得到目标示教结果信息;所述目标示教结果信息包括若干个目标示教机器人识别信息。
10、本发明第三方面公开了另一种用于机器人示教的装置,装置包括:
11、存储有可执行程序代码的存储器;
12、与存储器耦合的处理器;
13、处理器调用存储器中存储的可执行程序代码,执行本发明实施例第一方面公开的用于机器人示教的方法中的部分或全部步骤。
14、本发明第四方面公开了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令被调用时,用于执行本发明实施例第一方面公开的用于机器人示教的方法中的部分或全部步骤。
技术特征:1.一种用于机器人示教的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的用于机器人示教的方法,其特征在于,所述对所述示教机器人图像信息进行预处理,得到初始示教图像信息,包括:
3.根据权利要求2所述的用于机器人示教的方法,其特征在于,所述对所述示教机器人图像信息进行二值化处理,得到二值示教图像信息,包括:
4.根据权利要求1所述的用于机器人示教的方法,其特征在于,所述利用图像处理模型对所述初始示教图像信息进行识别处理,得到目标示教结果信息,包括:
5.根据权利要求1所述的用于机器人示教的方法,其特征在于,所述图像处理模型包括第一卷积模块、第二卷积模块、第三卷积模块、第四卷积模块、第五卷积模块、第一归一模块、第二归一模块、第三归一模块、第四归一模块、第五归一模块、第一激活模块、第二激活模块、第三激活模块、第四激活模块、第五激活模块、第六激活模块、第一浅特征提取模块、第二浅特征提取模块、第三浅特征提取模块、深度特征提取模块、第一动态特征提取模块、第二动态特征提取模块、第三动态特征提取模块、第四动态特征提取模块、第一采样模块、第二采样模块、融合模块;其中,
6.根据权利要求5所述的用于机器人示教的方法,其特征在于,所述第一浅特征提取模块包括第一卷积单元、第二卷积单元、第三卷积单元、第四卷积单元、第五卷积单元、第一归一单元、第二归一单元、第三归一单元、第四归一单元、第五归一单元、第一激活单元、第二激活单元、第三激活单元、第四激活单元、第五激活单元、第一加融合单元、第二加融合单元;其中,
7.根据权利要求5所述的用于机器人示教的方法,其特征在于,所述第一动态特征提取模块包括第六卷积单元、第七卷积单元、第八卷积单元、第九卷积单元、第十卷积单元、第十一卷积单元、第十二卷积单元、第六归一单元、第七归一单元、第八归一单元、第九归一单元、第十二归一单元、第六激活单元、第七激活单元、第八激活单元、第九激活单元、第十二激活单元、第三加融合单元、第四加融合单元、第一乘融合单元;其中,
8.一种用于机器人示教的装置,其特征在于,所述装置包括:
9.一种用于机器人示教的装置,其特征在于,所述装置包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令被调用时,用于执行如权利要求1-7任一项所述的用于机器人示教的方法。
技术总结本发明公开了一种用于机器人示教的方法及装置,该方法包括:获取示教机器人图像信息;对示教机器人图像信息进行预处理,得到初始示教图像信息;初始示教图像信息包括若干张第一示教机器人图像信息;利用图像处理模型对初始示教图像信息进行识别处理,得到目标示教结果信息;目标示教结果信息包括若干个目标示教机器人识别信息。技术研发人员:熊昕晔,翟宁受保护的技术使用者:深圳市华焱智能有限公司技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51208.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表