尾翼装置及机器人的制作方法
- 国知局
- 2024-07-08 10:58:08
本发明涉及一种机器人,尤其涉及的是一种尾翼装置。
背景技术:
1、目前国内外已经在动物和机器人中研究了空中重新定向和稳定着陆等一系列运动问题。当动物或机器人意外跌倒时,这种运动对于安全和生存至关重要。例如,一只坠落的猫可以旋转其前后身体,将尾巴和腿摆动至自身右侧,然后安全着陆,四脚朝下。被弹射离开轨道的松鼠可以利用尾部运动稳定自己,从而成功着陆。在机器人中,尤其是像minicheetah和unitree a1这样的中型四足机器人,它们在坠落时可能会遇到同样的安全问题。参考著名的猫下落问题,我们可以将其称为四足(轮足)机器人下落问题。因此,需要解决四足(轮足)机器人的安全着陆问题。
2、有两种途径可以解决此类问题:1)设计着陆策略来搜索足端最佳触地顺序并优化着陆影响的接触力;2)使用四肢或额外的附肢将身体调整为水平姿势,应用运动控制器实现安全落地。在之前的研究工作中,第一种途径已实现,但研究人员的结果表明minicheetah只能处理普通的水平跌落。此外,当身体与水平面有明显的方向偏移时,机器人可能会因着陆时腿部受力分布不均匀而损坏。相比而言,第二种途径的目标是在着陆之前将身体重新调整到水平方向,甚至是所需的姿势(适应地形和环境),这减轻了着陆控制的负担并减轻了机器人的机械损坏。在第二种途径中,如若利用腿和脚去平衡身体,鉴于腿部转动惯量相对于身体来说较小,需要在腿上增加额外的质量,以增加转动惯量,此种设定使得四足机器人在陆地运动时消耗更多能量,因此我们将更多的研究方向对准尾翼设计。
3、多年来,人们提出了各种各样的设计来模仿动物尾巴的功能,目标实现类似动物一样随心所欲控制躯体平衡。空间摆动尾翼机构(spptm)因其工作空间大和惯性调整能力强,是机器人尾翼应用的良好选项。
4、2015年,南非开普顿大学研究人员使用锥齿轮方法构建了2自由度机器人尾翼结构,以同时实现大工作空间和输出功率,由于锥齿轮中常见的齿隙和摩擦问题,会对机构运动精度产生影响。尾翼长度达到0.5m,重量0.4kg,俯仰角度设计为45°到115°,偏航角设计为±90°。由于设计中尾部俯仰中心和偏航中心之间的偏移可能会对车身产生不均匀的反作用扭矩,从而使控制系统的开发更具挑战性。
5、2016年,宾夕法尼亚大学研究人员开发2自由度尾部,该设计基于曲柄连杆机构将电机扭矩直接传输到尾部,能够产生相对较大的输出扭矩,尾翼的长度设置为0.3m,质量为150g,偏航方向约±30°,偏航角度工作空间有限。
6、2020年,香港中文大学的研究人员设计并构建了一种基于球形连杆机构的新型三自由度可变形惯性尾翼,结合弹簧伸缩套管实现了更广泛的惯性调节能力。尾翼能够缩回到总长度的一半以上,且直径小15mm,长度0.3m,重量240g。由于采用了底层弹簧加载机构,该设计不利于伸展速度控制,用于电缆线管理的万向滑轮系统总体上不够紧凑和可靠,无法进行快速的惯性调整。同时,研究人员也设计一种八杆联动尾翼,其内置卷曲模式使尾翼长度运动学变得复杂,尾翼设计在其横向平面上缺乏结构支撑,导致侧向刚度较差。
7、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息已构成为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明所要解决的技术问题在于:如何解决目前的尾翼装置自由度低、刚度较差的问题。
2、本发明通过以下技术手段实现解决上述技术问题的:
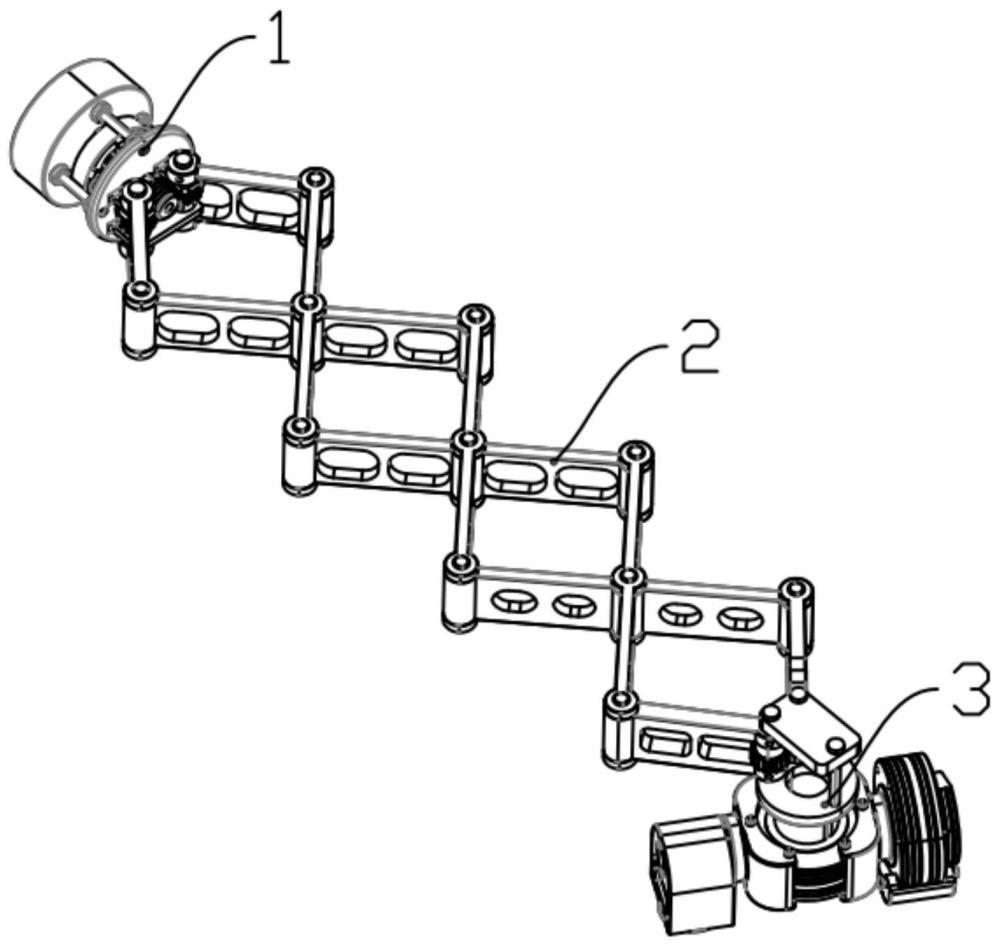
3、尾翼装置,包括尾头组件、尾中组件、尾根组件,所述尾头组件的驱动端能够转动的连接所述尾中组件的一端并能够使尾中组件伸缩,所述尾中组件的另一端能够转动的连接所述尾根组件,所述尾中组件由多个转动连接的剪式结构并联而成,所述尾根组件包括转动驱动件、俯仰驱动件,所述转动驱动件与所述尾中组件的另一端连接,所述俯仰驱动件与所述转动驱动件连接,所述转动驱动件的旋转方向与所述尾中组件伸长方向正交,所述俯仰驱动件的旋转方向与所述转动驱动件的旋转方向正交。
4、本发明中通过尾头组件的驱动端实现尾中组件的伸长和缩回,转动驱动件则实现旋转运动,俯仰驱动件实现俯仰运动,实现了三自由度尾翼,可在0.15s内实现有效的惯性调整。将尾翼长度调整与尾翼运动(俯仰/偏航)分离,实现二者的解耦;可以主动控制尾部缩回和伸展运动,设计的尾翼的伸缩驱动件位于尾部远端,增大尾翼动量矩,减少了尾头使用配重块的需求,减轻了尾翼总体重量。
5、优选的,所述尾头组件包括安装基座、第一电机、蜗杆、两个蜗轮、两个第一连杆,所述第一电机连接所述安装基座,所述第一电机的驱动端连接所述蜗杆,所述蜗杆伸出所述安装基座后与两个所述蜗轮啮合,所述蜗轮能够转动的连接所述安装基座的顶面,所述第一连杆与所述蜗轮固定连接。
6、刚性连杆机构提供尾部快速收缩/伸展响应,使其能够以与动物相当的速度(0.15秒内)调整收缩尾翼。
7、优选的,所述安装基座包括电机座、第一支柱、蜗轮座,所述第一电机固定安装在所述电机座内,多个所述第一支柱的一端连接所述电机座、另一端连接蜗轮座的底面,第一电机的驱动端连接驱动法兰,驱动法兰与蜗杆紧固连接,所述蜗杆间隙穿过蜗轮座,所述蜗轮座的顶面连接蜗轮架,所述蜗轮通过第一销轴连接在蜗轮座上,所述第一连杆与第一销轴紧固连接。
8、优选的,所述蜗杆与所述蜗轮的齿数至少为20:1。
9、优选的,所述尾中组件包括至少三组剪式结构,相邻剪式结构的端部转动连接,每个所述剪式结构均包括第一剪式分体和第二剪式分体,所述第一剪式分体与所述第二剪式分体交叉形成x结构并在中部形成转动连接。
10、优选的,所述尾根组件还包括两个齿轮、两个第二连杆、齿轮支架组件,两个所述齿轮能够转动的连接所述齿轮支架组件上,两个所述齿轮啮合,两个所述齿轮分别与所述第二连杆的一端紧固连接,所述第二连杆的另一端与所述尾中组件转动连接,所述转动驱动件的驱动端与所述齿轮支架组件连接。
11、优选的,所述齿轮支架组件包括齿轮板、齿轮架、第二支柱,所述齿轮中部穿过第二销轴并与之紧固连接,所述齿轮架的一端与所述第二支柱以及第二销轴连接,所述第二支柱的另一端以及第二销轴的另一端与所述齿轮板连接。
12、优选的,所述转动驱动件包括第二电机、第一支架、第二支架,所述俯仰驱动件包括第三电机、第三支架、第四支架,所述第二电机的定子与第一支架固定连接,第一支架与第二支架转动连接,所述第二电机的定子还与第三支架固定连接,第三支架与第三电机的转子紧固连接,所述第三电机的定子与第四支架连接。
13、本发明还公开机器人,包括机器人本体、上述尾翼装置,所述尾翼装置连接机器人本体的背部固定连接。
14、优选的,所述转动驱动件包括第二电机、第一支架、第二支架,所述俯仰驱动件包括第三电机、第三支架、第四支架,所述第二电机的定子与第一支架固定连接,第一支架与第二支架转动连接,所述第二电机的定子还与第三支架固定连接,第三支架与第三电机的转子紧固连接,所述第三电机的定子与第四支架连接,所述第二支架与所述第四支架与机器人本体的背部固定连接。
15、本发明的优点在于:
16、(1)本发明中通过尾头组件的驱动端实现尾中组件的伸长和缩回,转动驱动件则实现旋转运动,俯仰驱动件实现俯仰运动,实现了三自由度尾翼,可在0.15s内实现有效的惯性调整。将尾翼长度调整与尾翼运动(俯仰/偏航)分离,实现二者的解耦;可以主动控制尾部缩回和伸展运动,设计的尾翼的伸缩驱动件位于尾部远端,增大尾翼动量矩,减少了尾头使用配重块的需求,减轻了尾翼总体重量;
17、(2)刚性连杆机构提供尾部快速收缩/伸展响应,使其能够以与动物相当的速度(0.15秒内)调整收缩尾翼;
18、(3)具有一定尾头重量的尾翼会使得身体向着尾翼运动的相反方向运动,以达到调整姿态的作用。
本文地址:https://www.jishuxx.com/zhuanli/20240617/51284.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表