一种用于空间机械臂作业的改进动态基元方法
- 国知局
- 2024-07-08 11:01:05
本发明属于空间机械臂,涉及一种空间机械臂轨迹生成方法,特别是一种基于改进动态基元的模仿学习轨迹生成方法。
背景技术:
1、空间机械臂运动规划要求轨迹具有安全性、稳定性、确定性、高精度等特点。传统基于采样和优化的运动规划方法规划结果不具有确定性,即相同条件下规划结果可能不同,难以应用于空间机械臂作业。文献“ijspeert aj,nakanishi j,hoffmann h,etal.dynamical movement primitives:learning attractor models for motorbehaviors.neural computation,2013,25(2):328-373”提出了一种基于模仿学习的动态基元(dynamical movement primitives,dmp)方法,该方法基于二阶弹簧阻尼动力学系统加入非线性项实现轨迹学习,具有规划快速、泛化能力强等优点。然而文献所述方法规划得到的轨迹存在末端误差,轨迹精度无法达到空间机械臂作业要求,且泛化轨迹映射到机械臂关节空间可能存在不平滑现象,无法直接应用在空间任务中。
技术实现思路
1、本发明所要解决的技术问题是:
2、为了实现空间机械臂的快速轨迹规划,考虑机械臂作业轨迹的安全性、稳定性和高精度要求,结合空间机械臂作业环境特点,本发明提供一种用于空间机械臂作业的改进动态基元方法。
3、为了解决上述技术问题,本发明采用的技术方案为:
4、一种用于空间机械臂作业的改进动态基元方法,其特征在于,包括:
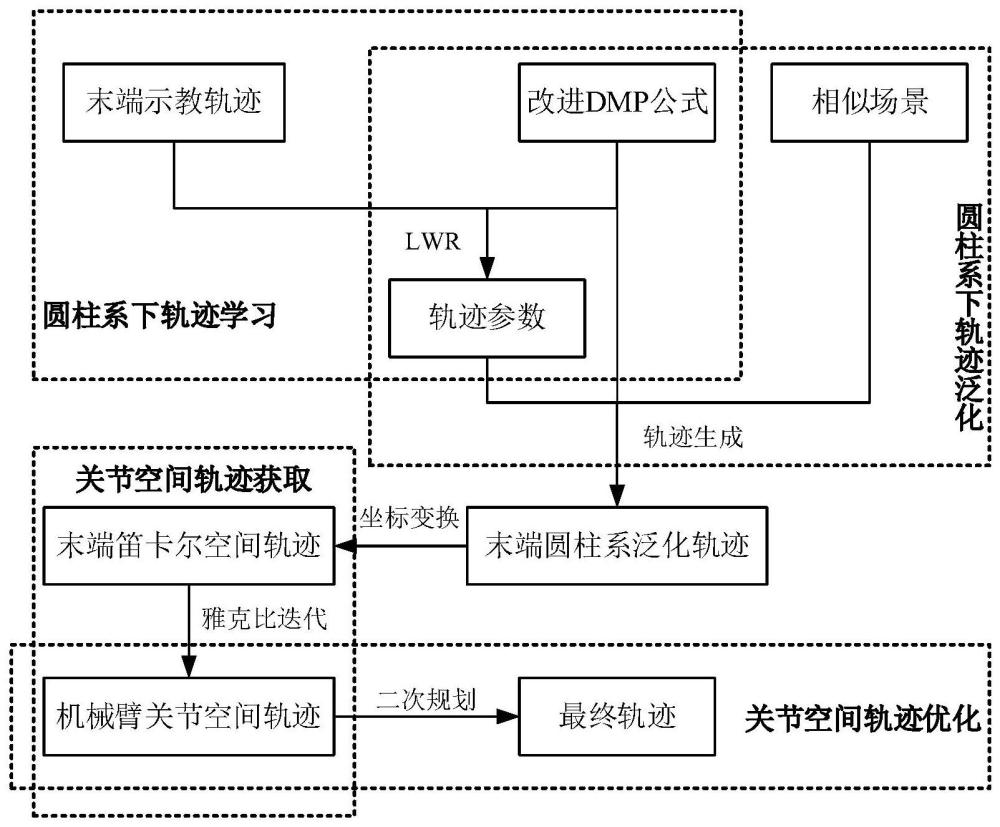
5、在圆柱坐标系下对动态基元方法公式进行改进,在ρ坐标方向引入避障项来实现机械臂末端与搭载机械臂的航天器主体的避障;
6、将基于改进动态基元方法获得的圆柱坐标系轨迹转化到笛卡尔坐标系,基于雅克比的逆运动学计算得到笛卡尔空间轨迹;
7、对笛卡尔空间轨迹进行二次规划:将末端精确位姿对应的构型作为末端约束,以相似度指标、平滑性指标作为优化指标对笛卡尔空间轨迹进行优化。
8、本发明进一步的技术方案:所述改进后的动态基元方法公式为:
9、
10、其中,y和z分别表示位置量和引入的系统速度相关量,g表示目标位置,τ是时间常数,αz和βz是正常数且βz=αz/4,f为非线性强迫项,为避障项,ρ表示到航天器中轴距离,k为常值系数,相变量s使得避障项能够随着运动过程衰减,从而保证系统的目标收敛特性。
11、本发明进一步的技术方案:所述将基于改进动态基元方法获得的圆柱坐标系轨迹转化到笛卡尔坐标系,基于雅克比的逆运动学计算得到笛卡尔空间轨迹,具体为:
12、在机器人领域有雅克比矩阵相关定义,其具有如下性质:
13、
14、其中,xe表示末端位姿,表示末端速度和角速度,θ表示机械臂关节构型,表示机械臂关节角速度,j为雅克比矩阵;
15、假定机械臂当前位姿为x0,当前构型为θ0,下一步目标位姿为x1,每一步长的运动为小量,即δx=x1-x0是一个小量;则
16、δθ=pinv(j)δx
17、利用上式,通过多次迭代求出到达目标位姿时机器人的关节角度变化量δθ,进而得到对应目标位姿x1的目标构型:
18、θ1=θ0+δθ
19、获得机械臂关节空间轨迹q=[θ0,θ1,...,θn],n为该轨迹对应的步长数。
20、本发明进一步的技术方案:将优化轨迹与参考轨迹的差值平方作为相似度指标,形式如下:
21、
22、其中,x=[θ11,θ21,...,θ71,...,θ1n,θ2n,...,θ7n]t为优化变量,为原关节空间参考轨迹记,a1是7n×7n的单位矩阵,线性项的系数是常数向量h=-2xr,c是仅与参考轨迹xr相关的常数项。
23、本发明进一步的技术方案:所述平滑性指标为:
24、
25、
26、其中,06×1表示6行1列的0元素组成的向量。
27、本发明进一步的技术方案:所述末端约束为:
28、
29、其中,θinit和θend分别为初末构型,0(n-14)×(n-14)表示(n-14)行(n-14)列的0元素组成的矩阵、0(n-14)×1表示(n-14)行1列的0元素组成的向量。
30、一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
31、一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
32、本发明的有益效果在于:
33、本发明提供的一种用于空间机械臂作业的改进动态基元方法,通过在动态基元方法中添加避障项,实现机械臂末端与航天器主体的避障,通过二次规划,克服了当前动态基元方法末端误差缺陷。
34、给定示教轨迹,所提方法可以快速学习,并泛化应用于相似场景中。利用本方法可以方便实现机械臂末端与航天器主体的避障,同时本方法消除了关节空间轨迹的不平滑与泛化轨迹的末端误差。
技术特征:1.一种用于空间机械臂作业的改进动态基元方法,其特征在于,包括:
2.根据权利要求1所述一种用于空间机械臂作业的改进动态基元方法,其特征在于,所述改进后的动态基元方法公式为:
3.根据权利要求1所述一种用于空间机械臂作业的改进动态基元方法,其特征在于,所述将基于改进动态基元方法获得的圆柱坐标系轨迹转化到笛卡尔坐标系,基于雅克比的逆运动学计算得到笛卡尔空间轨迹,具体为:
4.根据权利要求1所述一种用于空间机械臂作业的改进动态基元方法,其特征在于,将优化轨迹与参考轨迹的差值平方作为相似度指标,形式如下:
5.根据权利要求1所述一种用于空间机械臂作业的改进动态基元方法,其特征在于,所述平滑性指标为:
6.根据权利要求1所述一种用于空间机械臂作业的改进动态基元方法,其特征在于,所述末端约束为:
7.一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现权利要求1-6任一项所述的方法。
8.一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现权利要求1-6任一项所述的方法。
技术总结本发明涉及一种用于空间机械臂作业的改进动态基元方法,属于空间机械臂技术领域。首先针对空间环境,在圆柱坐标系下进行基元轨迹学习,并通过引入避障项来实现机械臂末端与搭载机械臂的航天器主体的避障;将圆柱坐标系轨迹计算转化到笛卡尔坐标系,并通过基于雅克比的逆运动学计算得到笛卡尔空间轨迹;针对笛卡尔空间可能存在的不平滑现象和末端误差问题,通过二次规划方法,将末端精确构型作为约束,将轨迹平滑性和与原轨迹的相似性作为指标,对轨迹进行优化。利用二次规划进行轨迹优化,求解快速,能够实现轨迹实时优化。最终克服动态基元的方法缺陷,实现其在空间机械臂作业中的应用。技术研发人员:王明明,雷振凯,罗建军,崔尧受保护的技术使用者:西北工业大学深圳研究院技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240617/51493.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表