一种分布式驱动的张拉整体多臂机器人
- 国知局
- 2024-07-08 11:04:46
本发明属于多臂机器,具体涉及一种分布式驱动的张拉整体多臂机器人。
背景技术:
1、机器人如今在不同的行业和不同的领域中发挥着重要的作用。近数十年来,人们努力探索者机器人在工厂之外的复杂环境中工作,例如开发了医疗机器人、扫地机器人、空间机器人等。而在一些非结构化环境下,连续柔性的操作臂的作用被挖掘,例如在狭小区域的探索任务、灾害救援工作和空间碎片的捕获回收。为此,科研人员提出了多种连续型的操作臂设计,此类操作臂一般具备灵活的变形能力以及柔顺的臂体。由于具备连续变形的能力,操作臂不仅可以在狭小区域中执行探索任务,还可以利用臂体缠绕物体,实现柔性抓捕。
2、张拉整体结构由于其刚柔耦合的特点,已被应用于连续型操作臂的设计中,并且都表现出了良好的性能。张拉整体是刚性元件和拉伸元件在张力作用下形成的自平衡结构,其中拉伸元件一般为绳索与弹簧等弹性元件,而通过拉伸元进行结构的变形驱动也是最常用的方式。在很多张拉整体操作臂中,一般采用将舵机安装在根部,然后通过绳索进行传动的外驱驱动方式,这种方式能够使臂体具有更高的刚度质量比。采用这种驱动方式,则至少需要三个电机才能控制操作臂沿任意方向弯曲。然而采用三个舵机仅能实现操作臂沿某一方向的单一弯曲运动,若要保证操作臂具有较高的灵活性,一般需要安装更多驱动器,这导致操作臂根部的驱动装置体积较大且结构复杂。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种分布式驱动的张拉整体多臂机器人,采用分段驱动的方式,每个驱动段装有独立的驱动器,能够实现各驱动段独立的运动控制,从而使得操作臂具有灵活的运动能力,并且每个驱动段仅包含两个驱动器,其中一个实现臂体的轴向旋转,一个用于驱动臂体弯曲,相对于一般的驱动方式减少了一个驱动器,但不损失操作臂的灵活性。
2、为了达到上述目的,本发明是通过以下技术方案实现的:
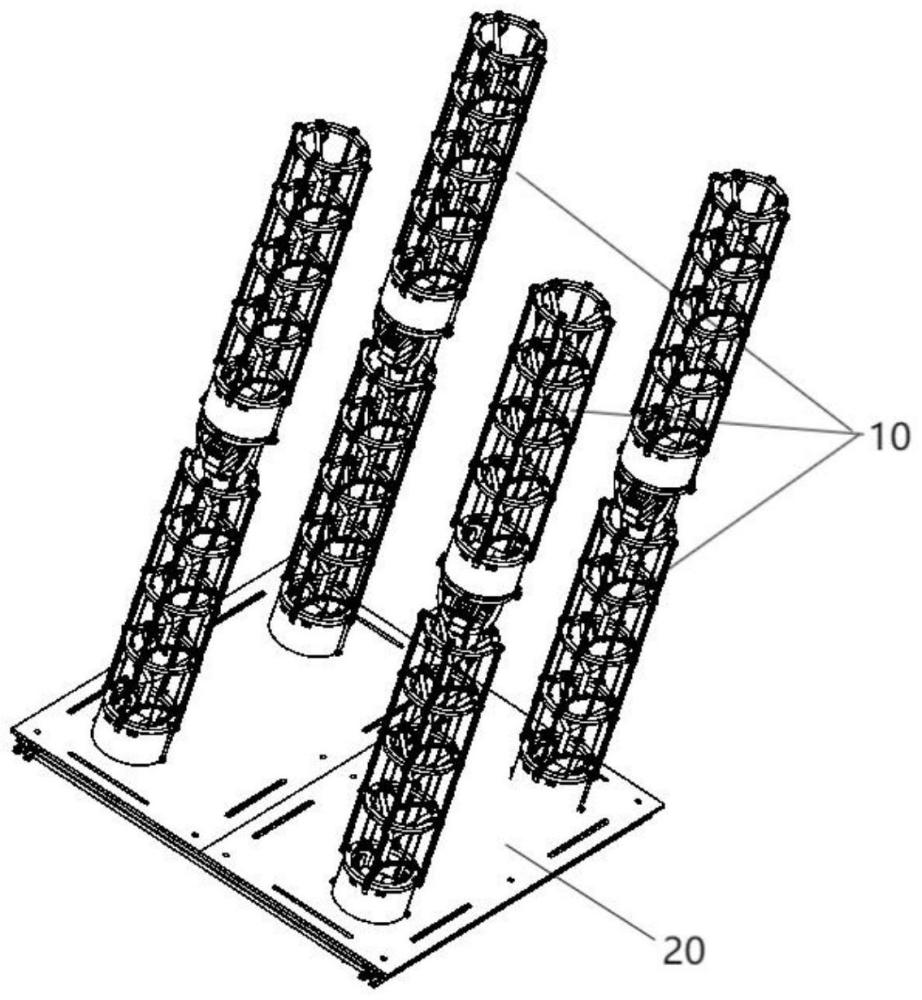
3、一种分布式驱动的张拉整体多臂机器人,包括安装底座;
4、所述安装底座上安装有两个以上张拉整体式柔性操作臂,每个操作臂由若干个模块化驱动段连接组成;
5、所述模块化驱动段由驱动装置与张拉整体式的臂体连接而成;
6、所述臂体由若干个y型连接架通过弹簧连接组成,相邻两个y型连接架之间纵向对称安装有弹簧,径向圆周等距安装有奇数根弹簧,组成了自平衡的张拉整体结构,各y型连接架之间贯穿有多根驱动绳索,驱动绳索端头与驱动装置连接,驱动绳索的牵拉使得臂体产生弯曲变形运动;
7、所述驱动装置包括旋转驱动模块与绳索驱动模块,旋转驱动模块驱动整个臂体进行轴向旋转;绳索驱动模块通过绞盘控制驱动绳索以驱动臂体弯曲,旋转驱动模块与绳索驱动模块分别由一个舵机进行驱动。
8、优选地,所述y型连接架包括三维y型支架以及其顶部连接的圆环,圆环上圆周等距贯穿开设了四个穿绳孔,圆环外圆周面等距一体连接有四个外弹簧卡槽,圆环上表面以及三维y型支架底部也分别圆周等距连接了三个内弹簧卡槽。
9、优选地,所述相邻两个y型连接架之间对应的外弹簧卡槽之间设置外连接弹簧连接,相邻两个y型连接架之间的其中一y型连接架的圆环上表面对应与另一y型连接架底部的内弹簧卡槽设置内连接弹簧连接。
10、优选地,所述四个穿绳孔内穿过四根驱动绳索,驱动绳索其中相邻两根为拉绳,另外两根为松绳,驱动绳索一端固定连接在绞盘上,另一端固定连接在最后一个y型连接架的穿绳孔处。
11、优选地,所述旋转驱动模块包括与y型连接架拥有相同的圆环以及弹簧卡槽与穿绳孔的弧形支架,圆环内通过舵机安装平台安装有单轴舵机,单轴舵机旋转轴与旋转圆盘中心连接,且旋转圆盘的外圆周等距设置四个轴承,旋转圆盘的外圆周嵌入轴承的凹槽内,轴承固定在舵机安装平台背面,轴承固定旋转圆盘的同时降低转动摩擦力。
12、优选地,所述绳索驱动模块包括安装在旋转圆盘上的u型连接座,u型连接座内安装了双轴舵机,双轴舵机的两转轴上分别安装有绞盘,双轴电机的两侧还安装有臂体连接架,所述臂体连接架顶部也设置有与y型连接架相同的圆环、弹簧卡槽与穿绳孔。
13、优选地,所述绞盘设计为不同半径的两个轨道,其中半径较大的轨道用于收绳,半径较小的轨道用于松绳。
14、优选地,所述最后一个y型连接架对应穿绳孔的位置安装滑轮,驱动绳索从绞盘出来后穿过臂体连接架的穿绳孔以及各y型连接架的穿绳孔后,将绕过最后一个y型连接架上的滑轮,然后再依次穿过各y型连接架的穿绳孔,最后连接固定在臂体连接架上。
15、本发明的有益效果是:
16、(1)操作臂采用分段驱动的方式,每个驱动段装有独立的驱动器,能够实现各驱动段独立的运动控制,从而使得操作臂具有灵活的运动能力;
17、(2)每个驱动段仅包含两个驱动器,其中一个实现臂段的轴向旋转,一个用于驱动臂体弯曲,相对于一般的驱动方式减少了一个驱动器,但不损失操作臂的灵活性;
18、(3)在最后一个y型连接架对应穿绳孔的位置安装滑轮,驱动绳索从绞盘出来后穿过臂体连接架的穿绳孔以及各y型连接架的穿绳孔后,将绕过最后一个y型连接架上的滑轮,然后再依次穿过各y型连接架的穿绳孔,最后连接固定在臂体连接架上,这里滑轮起到动滑轮的作用,从而能够更加省力,降低驱动舵机的负载。
19、(4)旋转圆盘的外圆周等距设置四个轴承,旋转圆盘的外圆周嵌入轴承的凹槽内,轴承固定在舵机安装平台背面,轴承固定旋转圆盘的同时降低转动摩擦力,既保证了元件的稳定连接,又降低了转动的摩擦力。
技术特征:1.一种分布式驱动的张拉整体多臂机器人,包括安装底座(20),其特征在于,所述安装底座(20)上安装有两个以上张拉整体式柔性操作臂(10),每个操作臂(10)由若干个模块化驱动段连接组成;
2.根据权利要求1所述的分布式驱动的张拉整体多臂机器人,其特征在于,所述y型连接架(1)包括三维y型支架(101)以及其顶部连接的圆环(102),圆环(102)上圆周等距贯穿开设了四个穿绳孔(103),圆环(102)外圆周面等距一体连接有四个外弹簧卡槽(104),圆环(102)上表面以及三维y型支架(101)底部也分别圆周等距连接了三个内弹簧卡槽(105)。
3.根据权利要求2所述的分布式驱动的张拉整体多臂机器人,其特征在于,所述相邻两个y型连接架(1)之间对应的外弹簧卡槽(104)之间设置外连接弹簧(2)连接,相邻两个y型连接架(1)之间的其中一y型连接架(1)的圆环(102)上表面对应与另一y型连接架(1)底部的内弹簧卡槽(105)设置内连接弹簧(3)连接。
4.根据权利要求2所述的分布式驱动的张拉整体多臂机器人,其特征在于,所述四个穿绳孔(103)内穿过四根驱动绳索(4),驱动绳索(4)其中相邻两根为拉绳,另外两根为松绳,驱动绳索(4)一端固定连接在绞盘(5023)上,另一端固定连接在最后一个y型连接架(1)的穿绳孔(103)处。
5.根据权利要求2所述的分布式驱动的张拉整体多臂机器人,其特征在于,所述旋转驱动模块(501)包括与y型连接架(1)拥有相同的圆环(102)以及弹簧卡槽与穿绳孔(103)的弧形支架(5011),圆环(102)内通过舵机安装平台(5012)安装有单轴舵机(5013),单轴舵机(5013)旋转轴与旋转圆盘(5015)中心连接,且旋转圆盘(5015)的外圆周等距设置四个轴承(5014),旋转圆盘(5015)的外圆周嵌入轴承(5014)的凹槽内,轴承(5014)固定在舵机安装平台(5012)背面,轴承(5014)固定旋转圆盘(5015)的同时降低转动摩擦力。
6.根据权利要求5所述的分布式驱动的张拉整体多臂机器人,其特征在于,所述绳索驱动模块(502)包括安装在旋转圆盘(5015)上的u型连接座(5022),u型连接座(5022)内安装了双轴舵机(5021),双轴舵机(5021)的两转轴上分别安装有绞盘(5023),双轴电机的两侧还安装有臂体连接架(6),所述臂体连接架(6)顶部也设置有与y型连接架(1)相同的圆环(102)、弹簧卡槽与穿绳孔(103)。
7.根据权利要求6所述的分布式驱动的张拉整体多臂机器人,其特征在于,所述绞盘(5023)设计为不同半径的两个轨道,其中半径较大的轨道用于收绳,半径较小的轨道用于松绳。
8.根据权利要求2至7任意一项所述的分布式驱动的张拉整体多臂机器人,其特征在于,所述最后一个y型连接架(1)对应穿绳孔(103)的位置安装滑轮(7),驱动绳索(4)从绞盘(5023)出来后穿过臂体连接架(6)的穿绳孔(103)以及各y型连接架(1)的穿绳孔(103)后,将绕过最后一个y型连接架(1)上的滑轮(7),然后再依次穿过各y型连接架(1)的穿绳孔(103),最后连接固定在臂体连接架(6)上。
技术总结本发明属于多臂机器技术领域,具体涉及一种分布式驱动的张拉整体多臂机器人,包括安装底座;安装底座上安装有两个以上张拉整体式柔性操作臂,每个操作臂由若干个模块化驱动段连接组成;模块化驱动段由驱动装置与张拉整体式的臂体连接而成。各模块化驱动段采用分段驱动的方式,每个驱动段装有独立的驱动器,能够实现各驱动段独立的运动控制,从而使得操作臂具有灵活的运动能力,并且每个驱动段仅包含两个驱动器,其中一个实现臂段的轴向旋转,一个用于驱动臂体弯曲,相对于一般的驱动方式减少了一个驱动器,但不损失操作臂的灵活性。技术研发人员:徐小明,陈阳辉,杨家希,罗嘉辉,邬树楠,蒋建平受保护的技术使用者:中山大学技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/51908.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表