一种机械臂用摇臂限位结构的制作方法
- 国知局
- 2024-07-08 11:04:49
本技术涉及机械臂,具体为一种机械臂用摇臂限位结构。
背景技术:
1、机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影,尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维空间上的某一点进行作业。
2、在对电视和电影进行拍摄时需要用到机械摇臂,但是现有机械摇臂只能通过使用者手部力度来进行角度定位,这就导致使用者长时间保持一个位置的话很容易出现脱力的现象,降低了机械摇臂的实用性。
3、因此,需要对机械摇臂进行改进,防止使用者在使用机械摇臂时容易出现脱力的现象。
技术实现思路
1、为解决上述背景技术中提出的问题,本实用新型的目的在于提供一种机械臂用摇臂限位结构,具备了便于限位的优点,解决了现有机械摇臂只能通过使用者手部力度来进行角度定位,这就导致使用者长时间保持一个位置的话很容易出现脱力的现象,降低了机械摇臂实用性的问题。
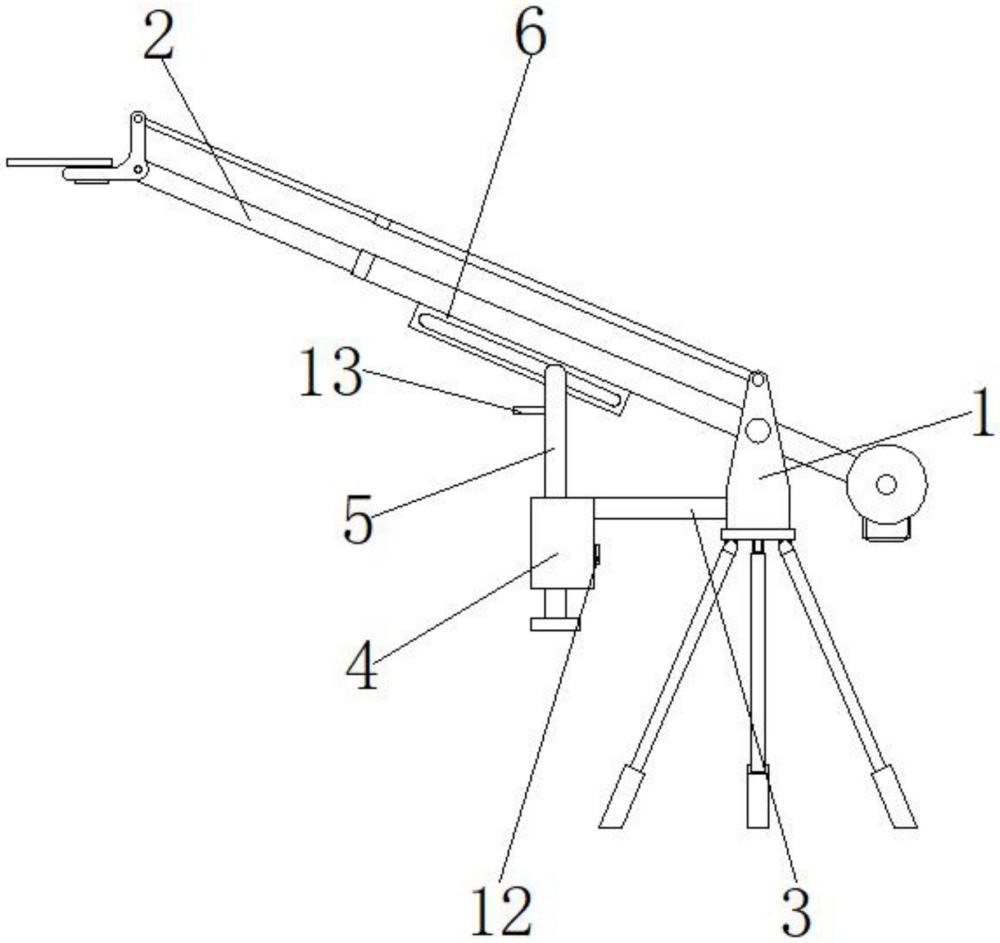
2、为实现上述目的,本实用新型提供如下技术方案:一种机械臂用摇臂限位结构,包括支撑架,所述支撑架的内部通过销杆转动连接有摇臂,所述支撑架的左侧固定连接有连接杆,所述连接杆的左侧固定连接有限位套,所述限位套的内部滑动连接有限位杆,所述支撑架的底部固定连接有限位框,所述限位杆套设在限位框的表面,所述限位杆的内部固定连接有牵引杆,所述牵引杆贯穿限位框并与限位框的内壁滑动连接,所述限位套的内部开设有传动槽,所述限位套的右侧设置有拉杆,所述拉杆的左侧贯穿传动槽并延伸至限位杆的内部,所述拉杆的表面固定连接有移动板,所述移动板的表面与传动槽的内壁滑动连接。
3、作为本实用新型优选的,所述移动板的右侧固定连接有两个回弹器,所述回弹器的右侧固定连接在传动槽的内壁。
4、作为本实用新型优选的,所述拉杆的右侧固定连接有转块,所述转块与转杆配合使用。
5、作为本实用新型优选的,所述限位杆的左侧固定连接有档杆,所述档杆与限位杆配合使用。
6、作为本实用新型优选的,所述限位杆的右侧开设有多个卡槽,所述卡槽与拉杆配合使用。
7、作为本实用新型优选的,所述拉杆的左侧固定连接有摩擦垫,所述摩擦垫的表面与卡槽的内壁接触。
8、与现有技术相比,本实用新型的有益效果如下:
9、1、本实用新型能够有效的对摇臂进行限位,避免使用者无法有效的对摇臂进行控制,增强了摇臂的实用性,防止使用者在使用机械摇臂时容易出现脱力的现象。
10、2、本实用新型通过设置回弹器,能够使移动板自动向内回弹,提高了移动板的实用性。
技术特征:1.一种机械臂用摇臂限位结构,包括支撑架(1),其特征在于:所述支撑架(1)的内部通过销杆转动连接有摇臂(2),所述支撑架(1)的左侧固定连接有连接杆(3),所述连接杆(3)的左侧固定连接有限位套(4),所述限位套(4)的内部滑动连接有限位杆(5),所述支撑架(1)的底部固定连接有限位框(6),所述限位杆(5)套设在限位框(6)的表面,所述限位杆(5)的内部固定连接有牵引杆(7),所述牵引杆(7)贯穿限位框(6)并与限位框(6)的内壁滑动连接,所述限位套(4)的内部开设有传动槽(8),所述限位套(4)的右侧设置有拉杆(9),所述拉杆(9)的左侧贯穿传动槽(8)并延伸至限位杆(5)的内部,所述拉杆(9)的表面固定连接有移动板(10),所述移动板(10)的表面与传动槽(8)的内壁滑动连接。
2.根据权利要求1所述的一种机械臂用摇臂限位结构,其特征在于:所述移动板(10)的右侧固定连接有两个回弹器(11),所述回弹器(11)的右侧固定连接在传动槽(8)的内壁。
3.根据权利要求1所述的一种机械臂用摇臂限位结构,其特征在于:所述拉杆(9)的右侧固定连接有转块(12),所述转块(12)与转杆配合使用。
4.根据权利要求1所述的一种机械臂用摇臂限位结构,其特征在于:所述限位杆(5)的左侧固定连接有档杆(13),所述档杆(13)与限位杆(5)配合使用。
5.根据权利要求1所述的一种机械臂用摇臂限位结构,其特征在于:所述限位杆(5)的右侧开设有多个卡槽(14),所述卡槽(14)与拉杆(9)配合使用。
6.根据权利要求5所述的一种机械臂用摇臂限位结构,其特征在于:所述拉杆(9)的左侧固定连接有摩擦垫(15),所述摩擦垫(15)的表面与卡槽(14)的内壁接触。
技术总结本技术公开了一种机械臂用摇臂限位结构,包括支撑架,所述支撑架的内部通过销杆转动连接有摇臂,所述支撑架的左侧固定连接有连接杆,所述连接杆的左侧固定连接有限位套,所述限位套的内部滑动连接有限位杆,所述支撑架的底部固定连接有限位框,所述限位杆套设在限位框的表面,所述限位杆的内部固定连接有牵引杆,所述牵引杆贯穿限位框并与限位框的内壁滑动连接,所述限位套的右侧设置有拉杆,所述拉杆的左侧贯穿传动槽并延伸至限位杆的内部。本技术能够有效的对摇臂进行限位,避免使用者无法有效的对摇臂进行控制,增强了摇臂的实用性,防止使用者在使用机械摇臂时容易出现脱力的现象。技术研发人员:刘佳欣受保护的技术使用者:华能重庆珞璜发电有限责任公司技术研发日:20230522技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/51913.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表