一种机械手升降运动机构过载保护装置的制作方法
- 国知局
- 2024-07-08 11:11:34
本发明涉及自动化传送系统,尤其涉及一种机械手升降运动机构过载保护装置。
背景技术:
1、悬臂梁机械手升降运动机构常被应用于自动化传送设备中升降轴有高行程的需求时,除了单体包装运送时存在占据过大空间之外,安装使用于设备中时,不论是人员进入设备内维修或者物体掉落时,都是处于升降轴动作范围的下方,此时若机械手升降轴向下动作时,人员或物体将受到升降轴向下推压冲击,具有相当程度的危险性,会给使得人员或物体造成压伤的风险。
2、综上,现有技术的悬臂梁机械手升降运动机构存在在运输过程中占用空间大,以及在使用过程中,位于升降轴动作范围内的下方的人员或物体会存在压伤风险的缺陷。
技术实现思路
1、为了解决上述问题,本发明提供一种机械手升降运动机构过载保护装置,以解决现有技术的悬臂梁机械手升降运动机构存在在运输过程中占用空间大,以及在使用过程中,位于升降轴动作范围内的下方的人员或物体会存在压伤风险的缺陷。
2、根据本发明的第一方面,提供了一种机械手升降运动机构过载保护装置,机械手升降运动机构过载保护装置设置于机械手升降运动机构上,机械手升降运动机构具有z轴升降本体、z轴升降滑台、悬臂本体和悬臂梁底座,z轴升降滑台滑动设置在z轴升降本体上,悬臂本体垂直设置在悬臂梁底座上,包括:连接轴、安全装置和安全插销;
3、z轴升降滑台的顶端端部与悬臂梁底座的顶端端部之间设有连接轴,以使悬臂梁底座以连接轴为旋转中心向上旋转;
4、z轴升降滑台的下端安装有安全装置,安全装置的插接口朝向悬臂梁底座设置,悬臂梁底座上安装有安全插销,安全插销与插接口相互匹配,以使安全插销根据悬臂梁底座的旋转位移情况插入或脱离插接口;
5、安全装置和机械手升降运动机构均与控制系统连接。
6、可选地,还包括支撑调节件,支撑调节件垂直旋拧在悬臂梁底座的底端端部,挡块螺栓的支撑端朝向z轴升降滑台设置。
7、可选地,支撑调节件为挡块螺栓。
8、通过本发明的一种机械手升降运动机构过载保护装置,首先,本申请通过在z轴升降滑台的顶端端部与悬臂梁底座的顶端端部之间设有连接轴,可使得在出货包装时将悬臂本体向上旋转使其定位靠近z轴升降本体,进而大幅度降低包装高度,且结构能稳定的被固定;
9、另外,本申请通过z轴升降滑台的下端安装有安全装置,安全装置的插接口朝向悬臂梁底座设置,悬臂梁底座上安装有安全插销,安全插销与插接口相互匹配的设置,可在机械手安装于设备后,解除出货固定物,将悬臂本体向下放置时,利用悬臂本体自身的重量向下旋转,使得安全插销插入插接口中,若悬臂本体在下降过程中压到干涉物体,悬臂本体受压迫向上旋转位移时,安全插销脱离安全装置上的插接口使得悬臂梁底座旋开,同时,控制系统控制z轴升降滑台停止工作;
10、因此,本发明解决了现有技术的悬臂梁机械手升降运动机构存在在运输过程中占用空间大,以及在使用过程中,位于升降轴动作范围内的下方的人员或物体会存在压伤风险的缺陷。
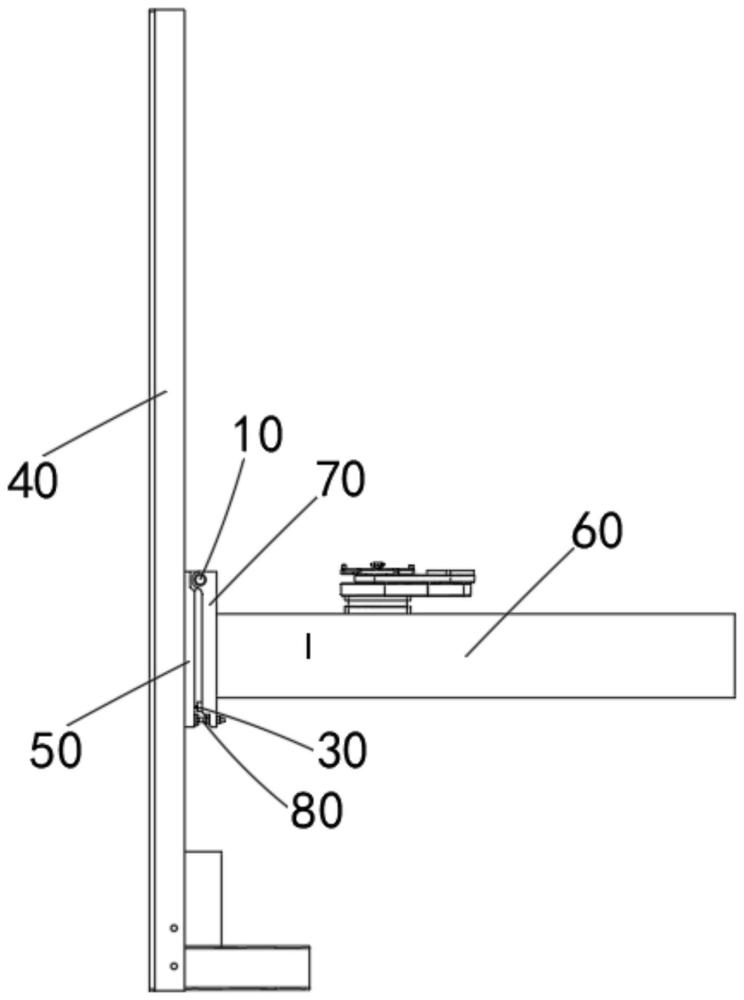
技术特征:1.一种机械手升降运动机构过载保护装置,所述机械手升降运动机构过载保护装置设置于机械手升降运动机构上,所述机械手升降运动机构具有z轴升降本体(40)、z轴升降滑台(50)、悬臂本体(60)和悬臂梁底座(70),所述z轴升降滑台(50)滑动设置在所述z轴升降本体(40)上,所述悬臂本体(60)垂直设置在所述悬臂梁底座(70)上,其特征在于,包括:连接轴(10)、安全装置(20)和安全插销(30);
2.根据权利要求1所述的一种机械手升降运动机构过载保护装置,其特征在于,还包括支撑调节件(80),所述支撑调节件(80)垂直旋拧在所述悬臂梁底座(70)的底端端部,所述挡块螺栓(80)的支撑端朝向所述z轴升降滑台(50)设置。
3.根据权利要求2所述的一种机械手升降运动机构过载保护装置,其特征在于,所述支撑调节件(80)为挡块螺栓。
技术总结本发明提供了一种机械手升降运动机构过载保护装置。一种机械手升降运动机构过载保护装置包括:连接轴、安全装置和安全插销;Z轴升降滑台的顶端端部与悬臂梁底座的顶端端部之间设有连接轴,以使悬臂梁底座以连接轴为旋转中心向上旋转;Z轴升降滑台的下端安装有安全装置,安全装置的插接口朝向悬臂梁底座设置,悬臂梁底座上安装有安全插销,安全插销与插接口相互匹配,以使安全插销根据悬臂梁底座的旋转位移情况插入或脱离插接口。本发明提供的一种机械手升降运动机构过载保护装置解决了现有技术的悬臂梁机械手升降运动机构存在在运输过程中占用空间大,以及在使用过程中,位于升降轴动作范围内的下方的人员或物体会存在压伤风险的缺陷。技术研发人员:王振强,戚汉凌受保护的技术使用者:北京和崎精密科技有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/52396.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。