摆放姿态随机的长方体物料自动抓取的位置姿态调整方法
- 国知局
- 2024-07-08 11:11:31
本发明属于工业机器人自动化操作与位置姿态规划,具体地说,本发明涉及一种摆放姿态随机的长方体物料自动抓取的位置姿态调整方法。
背景技术:
1、无论是传统的内燃机汽车,还是新能源汽车,其车身均是由若干满足预期强度要求的板件焊接组成的,车身制造的自动化、智能化一直是业内公认的关键技术。目前汽车零部件配套企业在车身结构件焊装中,仍有采用人工上件的方式进行生产作业,受人为因素影响,生产效率不高,产品的质量一致性差,漏上件或错上件情况难以避免。而部分汽车零部件厂家即使采用机器人作业完成辅助上件,也需要根据单个零件产品的特性,定制专用的上件定位机构,费用高且占用空间大,难以实现少人甚至于无人化操作。
2、上件工序是指通过人工或机器人将不同的物料(比如组成汽车侧围的不同板材等)以正确的位置姿态放置到专用夹具上的完整过程,其后续工序是将放置到夹具上的不同物料进行人工焊接或机器人自动焊接,因此精准上件是获得良好的产品质量一致性的必要保证。而采用工业机器人的无人化上件,则必然涉及物料表面特征识别,物料上关键点追踪和定位,以及物料摆放位置与姿态具有随机性前提下的自动抓取与精准放置等关键技术难题。
3、目前,物料上参照点的激光追踪与定位技术,基于图像识别原理的物料不同表面的特征识别技术已经日益成熟,如,授权公告号为cn105758306b的发明专利公开了空间运动刚体上一点运动轨迹的追踪与再现方法;授权公告号为cn117036367b的发明专利公开了一种基于图像识别的钣金件的质量检测方法及系统,等等。
4、针对摆放姿态随机的长方体物料,采用机器人配合两爪机械手进行自动抓取时,现有的技术尚未完全解决3个关键的技术难题:(1)按照技术要求,将姿态随机摆放的长方体物料在工装夹具(目标平面)上以正确的位置姿态精准放置问题;(2)若两爪机械手在抓取姿态随机摆放的长方体物料后,手爪夹紧面是长方体物料上的定位面(第二表面)时,因手部实体干涉无法通过一次抓取结合位置姿态调整完成该物料的正确放置任务,针对这种情况,如何调整该物料姿态后,再放回到物料摆放平面上,然后,通过二次抓取结合位置姿态调整顺利完成该物料的抓取和放置任务;(3)若两爪机械手在抓取姿态随机摆放的长方体物料后,长方体物料上的定位面(第二表面)为朝后面,因手部实体遮挡导致定位面特征无法识别且因手部实体干涉,也无法将该物料一次放置到目标平面上,针对这种情况,如何调整该物料姿态后,再放回到物料摆放平面上,然后通过二次抓取结合位置姿态调整顺利完成抓取任务。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提供一种摆放姿态随机的长方体物料自动抓取的位置姿态调整方法,目的是引导上件机器人在抓取过程中迅速调整长方体物料的位置和姿态,找正其定位基准,无差错完成该长方体物料在焊接夹具(目标平面)上的准确定位。
2、为了实现上述目的,本发明采取的技术方案为:摆放姿态随机的长方体物料自动抓取的位置姿态调整方法,包括步骤:
3、s1、提供长方体物料在目标平面上放置正确时,长方体物料的位置识别点在静坐标系中的坐标;
4、s2、长方体物料放置在物料摆放平面上;
5、s3、确定长方体物料的位置识别点在静坐标系中的当前坐标,计算上件机器人的抓取机械手的坐标调整量,根据计算结果调整抓取机械手的抓取位置。
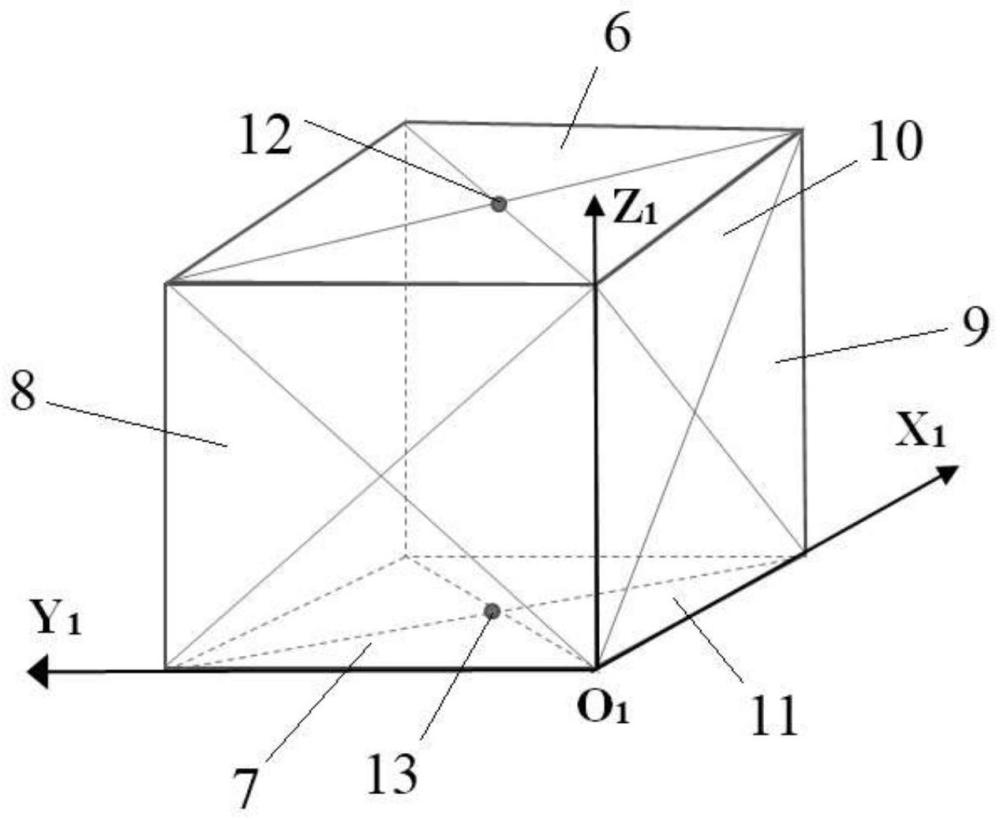
6、以所述长方体物料的一个顶点为原点,在其上建立局部坐标系,根据公式(1)、公式(2)和公式(3)计算所述长方体物料的位置识别点在静坐标系中的坐标(xma1,yma1,zma1);
7、xma1=xend (1)
8、yma1= yend + c × sin(α) (2)
9、zma1=zend + c × cos(α) (3);
10、其中,c为长方体物料的棱长,α为所述物料摆放平面与所述目标平面之间的夹角,(xend,yend,zend)为目标平面上的定位点在静坐标系中的坐标。
11、所述长方体物料放置在所述物料摆放平面后,根据公式(4)、公式(5)和公式(6)计算所述抓取机械手的坐标调整量xδ、yδ、和zδ;
12、xδ=x ma1 -x ma1' (4)
13、yδ=y ma1-y ma1' (5)
14、zδ=zma1-zma1' (6);
15、其中,(xma1',yma1',zma1')为长方体物料的位置识别点在静坐标系中的当前坐标。
16、若所述长方体物料的第二表面紧贴所述物料摆放平面且长方体物料的第三表面朝外,将长方体物料绕局部坐标系的z1轴反向旋转180°,然后再将长方体物料绕局部坐标系的x1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
17、若所述长方体物料的第二表面紧贴所述物料摆放平面且长方体物料的第五表面朝外,将长方体物料绕局部坐标系的z1轴正向旋转90°,然后再将长方体物料绕局部坐标系的y1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
18、若所述长方体物料的第二表面紧贴所述物料摆放平面且长方体物料的第六表面朝外,将长方体物料绕局部坐标系的z1轴反向旋转90°,然后再将长方体物料绕局部坐标系的y1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量。
19、若所述长方体物料的第一表面紧贴所述物料摆放平面且长方体物料的第四表面朝外,将长方体物料绕局部坐标系的x1轴正向旋转180°,然后再将长方体物料绕局部坐标系的x1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
20、若所述长方体物料的第一表面紧贴所述物料摆放平面且长方体物料的第三表面朝外,将长方体物料绕局部坐标系的x1轴正向旋转180°,然后再将长方体物料绕局部坐标系的z1轴反向旋转180°,然后再将长方体物料绕局部坐标系的x1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
21、若所述长方体物料的第一表面紧贴所述物料摆放平面且长方体物料的第五表面朝外,将长方体物料绕局部坐标系的x1轴正向旋转180°,然后再将长方体物料绕局部坐标系的z1轴反向旋转90°,然后再将长方体物料绕局部坐标系的y1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
22、若所述长方体物料的第一表面紧贴所述物料摆放平面且长方体物料的第六表面朝外,将长方体物料绕局部坐标系的x1轴正向旋转180°,然后再将长方体物料绕局部坐标系的z1轴正向旋转90°,然后再将长方体物料绕局部坐标系的y1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量。
23、若所述长方体物料的第三表面紧贴所述物料摆放平面且长方体物料的第二表面朝外,将长方体物料绕局部坐标系的y1轴正向旋转90°,然后再将长方体物料绕局部坐标系的z1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
24、若所述长方体物料的第三表面紧贴所述物料摆放平面且长方体物料的第一表面朝外,将长方体物料绕局部坐标系的y1轴正向旋转90°,然后再次抓取长方体物料使长方体物料的第四表面为内侧平面,然后再将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴反向旋转180°,然后再将长方体物料绕局部坐标系的x1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
25、若所述长方体物料的第三表面紧贴所述物料摆放平面且长方体物料的第六表面朝外,将长方体物料绕局部坐标系的z1轴正向旋转90°,然后再将长方体物料重新放置到物料摆放平面上,松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,然后再将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴反向旋转180°,然后再将长方体物料绕局部坐标系的x1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
26、若所述长方体物料的第三表面紧贴所述物料摆放平面且长方体物料的第五表面朝外,将长方体物料绕局部坐标系的z1轴正向旋转90°,然后再将长方体物料重新放置到物料摆放平面上,松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,使长方体物料的第四表面为内侧平面,然后再将长方体物料绕局部坐标系的y1轴正向旋转90°,然后再将长方体物料绕局部坐标系的x1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量。
27、若所述长方体物料的第四表面紧贴所述物料摆放平面且长方体物料的第一表面朝外,松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,使长方体物料的第三表面为内侧平面,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的x1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
28、若所述长方体物料的第四表面紧贴所述物料摆放平面且长方体物料的第二表面朝外,将抓取机械手绕局部坐标系的z1轴反向旋转180°,然后将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,使长方体物料的第三表面为内侧平面,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的x1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
29、若所述长方体物料的第四表面紧贴所述物料摆放平面且长方体物料的第五表面朝外,将抓取机械手绕局部坐标系的z1轴正向旋转90°,然后将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,使长方体物料的第三表面为内侧平面,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的x1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
30、若所述长方体物料的第四表面紧贴所述物料摆放平面且长方体物料的第六表面朝外,将抓取机械手绕局部坐标系的z1轴反向旋转90°,然后将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,使长方体物料的第三表面为内侧平面,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的x1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量。
31、若所述长方体物料的第五表面紧贴所述物料摆放平面且长方体物料的第一表面朝外,松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
32、若所述长方体物料的第五表面紧贴所述物料摆放平面且长方体物料的第二表面朝外,将抓取机械手绕局部坐标系的z1轴反向旋转180°,然后将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴正向旋转90°,然后再将长方体物料绕局部坐标系的y1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
33、若所述长方体物料的第五表面紧贴所述物料摆放平面且长方体物料的第三表面朝外,将抓取机械手绕局部坐标系的z1轴正向旋转90°,然后将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴正向旋转90°,然后再将长方体物料绕局部坐标系的y1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
34、若所述长方体物料的第五表面紧贴所述物料摆放平面且长方体物料的第四表面朝外,将抓取机械手绕局部坐标系的z1轴反向旋转90°,然后将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴正向旋转90°,然后再将长方体物料绕局部坐标系的y1轴正向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量。
35、若所述长方体物料的第六表面紧贴所述物料摆放平面且长方体物料的第一表面朝外,将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴反向旋转90°,然后再将长方体物料绕局部坐标系的y1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
36、若所述长方体物料的第六表面紧贴所述物料摆放平面且长方体物料的第二表面朝外,将抓取机械手绕局部坐标系的z1轴反向旋转180°,然后将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴反向旋转90°,然后再将长方体物料绕局部坐标系的y1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
37、若所述长方体物料的第六表面紧贴所述物料摆放平面且长方体物料的第三表面朝外,将抓取机械手绕局部坐标系的z1轴反向旋转90°,然后将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴反向旋转90°,然后再将长方体物料绕局部坐标系的y1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量;
38、若所述长方体物料的第六表面紧贴所述物料摆放平面且长方体物料的第四表面朝外,将抓取机械手绕局部坐标系的z1轴正向旋转90°,然后将长方体物料放置到物料摆放平面上,然后松开抓取机械手,并将抓取机械调整到初始姿态,然后再将抓取机械手绕局部坐标系的y1轴正向旋转90°,然后抓取机械手抓取长方体物料,然后将长方体物料绕局部坐标系的y1轴反向旋转90°,然后再将长方体物料绕局部坐标系的z1轴反向旋转90°,然后再将长方体物料绕局部坐标系的y1轴反向旋转一定角度,然后确定长方体物料的位置识别点在静坐标系中的当前坐标,最后计算抓取机械手的坐标调整量。
39、所述上件机器人为六轴工业机器人,所述抓取机械手为两手爪型结构。
40、本发明的摆放姿态随机的长方体物料自动抓取的位置姿态调整方法,能够针对长方体物料的六个不同表面落在物料摆放平面、上料机器人平面机械手抓取该物料的不同侧面时的情形,通过绕手爪局部坐标系的有限次旋转操作,结合长方体物料位置识别点坐标的确定,该上料机器人位置姿态调整方法在长方体物料摆放姿态随机场景下,可以实现长方体物料按照预期姿态和定位点对正后精准落在目标平面上;该方法具有准确抓取和精准放置的优点,可实现上料无人化,显著提高生产率和产品质量的一致性。
本文地址:https://www.jishuxx.com/zhuanli/20240617/52388.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。