一种电气自动化机械臂支架
- 国知局
- 2024-07-08 11:11:27
本发明涉及电气自动化,尤其涉及一种电气自动化机械臂支架。
背景技术:
1、电气自动化机械臂支架是一种专门用于支持和运行机械臂的设备,随着工业自动化的快速发展,机械臂在各个领域的应用越来越广泛,从物流仓储到制造业,从医疗保健到农业等,机械臂具有高精度、高效率和高灵活性的特点,可以完成各种复杂的任务,电气自动化机械臂支架的出现使得机械臂的安装和运行更加稳定和可靠,这种支架通过具有强大的电气自动化系统,可以实现机械臂的精确定位和运动控制,使机械臂能够适应不同的工作环境和任务需求,电气自动化机械臂支架不仅可以用于工业生产领域,还可以应用于服务机器人、医疗机器人、农业机器人等领域,它的出现为自动化生产和劳动力解放提供了更多的可能性,将有效提高生产效率和质量,并为人们创造更好的工作环境和生活条件。
2、现有技术中,用于电气自动化机械臂安装的支架,在对机械臂进行固定时,固定机构难以充分贴合到机械臂底座,导致固定不够稳固,而且在机械臂使用过程存在震动现象,容易影响使用寿命,因此,提出一种电气自动化机械臂支架。
技术实现思路
1、本发明的目的是为了解决现有技术中,用于电气自动化机械臂安装的支架,在对机械臂进行固定时,固定机构难以充分贴合到机械臂底座,导致固定不够稳固,而且在机械臂使用过程存在震动现象,容易影响使用寿命的问题,而提出的一种电气自动化机械臂支架。
2、为了实现上述目的,本发明采用了如下技术方案:
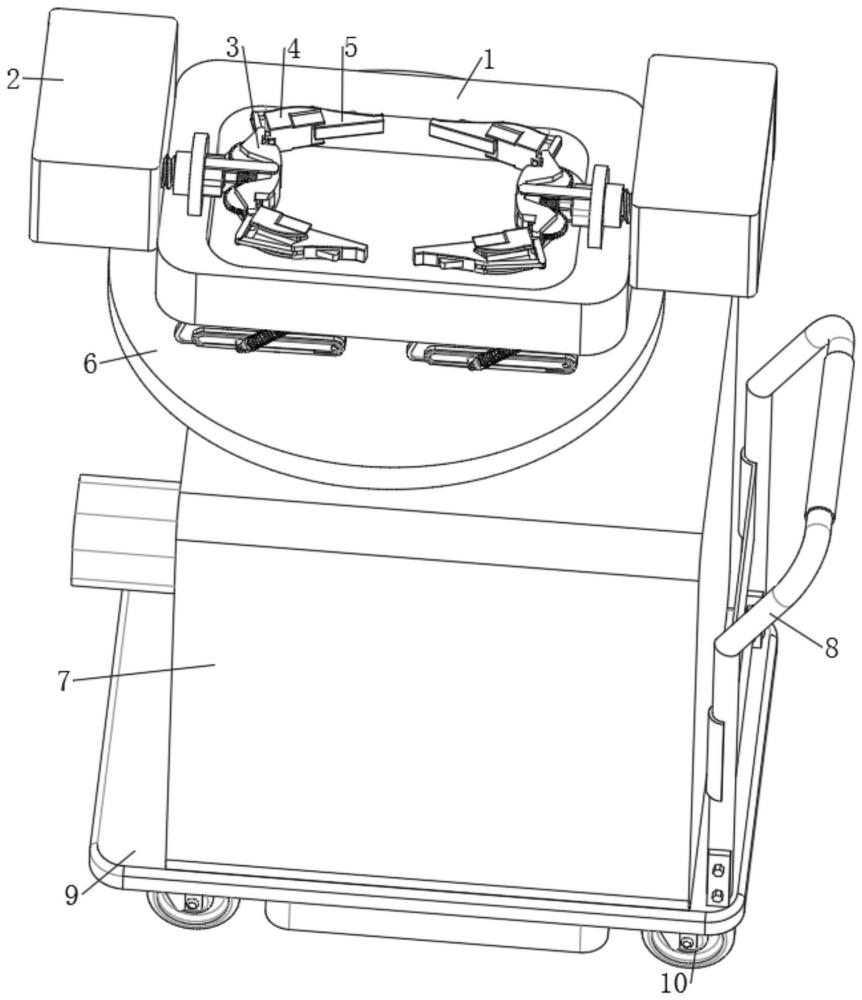
3、一种电气自动化机械臂支架,包括固定台,所述固定台外部固定连接有减震机构,所述减震机构包括连接件,所述连接件外部滑动连接有缓冲架,所述缓冲架外部转动连接有伸缩杆,所述伸缩杆外部转动连接有连接件,所述伸缩杆外部固定连接有伸缩弹簧,所述固定台外部固定连接有固定机构,所述固定连接包括固定盒体,所述固定盒体内部固定连接有第二电机;
4、所述第二电机外部固定连接有第二齿轮,所述第二齿轮外部啮合连接有第三齿轮,所述第三齿轮外部螺纹连接有螺纹杆,所述螺纹杆外部转动连接有固定壳体,所述固定壳体外部固定连接有第三电机,所述第三电机外部固定连接有第二蜗杆,所述第二蜗杆外部啮合连接有第二蜗轮,所述第二蜗轮外部啮合连接有第四齿轮,所述第四齿轮外部固定连接有第一固定件,所述第一固定件外部转动连接有第二固定件;
5、其中,所述缓冲机构数量有四个,所述每个缓冲机构内伸缩杆和伸缩弹簧数量均为两个,所述固定机构数量有两个,所述每个固定机构内均有两个第一固定件、第二固定件、第二蜗轮和第四齿轮,所述固定台外部设置有放置机械臂的凹槽。
6、上述技术方案进一步包括:
7、所述第一固定件外部固定连接有连动杆,所述连动杆外部转动连接有第二固定件;
8、其中,所述连动杆数量为两个。
9、所述固定盒体内部转动连接有第三齿轮。
10、所述缓冲架外部固定连接有传动台,所述传动台外部固定连接有传动齿条,所述传动齿条外部滑动连接有传动滑槽,所述传动滑槽外部固定连接有传动壳体。
11、所述传动壳体内部固定连接有第一电机,所述第一电机外部固定连接有第一蜗杆,所述第一蜗杆外部啮合连接有第一蜗轮,所述第一蜗轮外部固定连接有第一齿轮,所述第一齿轮外部啮合连接有传动齿条。
12、所述第一蜗杆外部转动连接有传动壳体,所述传动壳体内部转动连接有第一蜗轮,所述传动壳体内部转动连接有第一齿轮。
13、所述传动壳体外部固定连接有支撑板,所述支撑板外部固定连接有推把,所述支撑板外部转动连接有万向轮,所述支撑板外部固定连接有伸缩固定块;
14、其中,所述万向轮数量为四个。
15、相比现有技术,本发明的有益效果为:
16、1、本发明中,通过第二电机可控制固定壳体进行移动,两侧的固定壳体向固定台内的机械臂移动可对其底座形成压迫,达到固定,接着打开第三电机带动第二蜗杆转动,使得第二蜗轮和第四齿轮转动,进而带动第一固定件向内收缩,而在第一固定件收缩的同时可带动连动杆转动,使得第二固定件也向内收缩,从而增加固定机构与机械臂底座的贴合面积,提高固定效果,而设置在固定台下方的缓冲机构,可以对机械臂工作时产生的震动进行缓冲,从而提高机械臂的使用寿命。
17、2、本发明中,根据机械臂工作的不同工位,需要对机械臂的高度进行调整,打开第一电机带动第一蜗杆转动,第一蜗杆转动带动第一蜗轮转动,使得第一齿轮转动也发生转动,第一齿轮转动可带动啮合连接的传动滑槽进行移动,传动滑槽移动可带动传动台进行移动,进而带动机械臂的高度发生改变,使机械臂可以适配不同的工位,提高了支架的使用效果。
技术特征:1.一种电气自动化机械臂支架,包括固定台(1),其特征在于,所述固定台(1)外部固定连接有减震机构,所述减震机构包括连接件(19),所述连接件(19)外部滑动连接有缓冲架(12),所述缓冲架(12)外部转动连接有伸缩杆(20),所述伸缩杆(20)外部转动连接有连接件(19),所述伸缩杆(20)外部固定连接有伸缩弹簧(21),所述固定台(1)外部固定连接有固定机构,所述固定连接包括固定盒体(2),所述固定盒体(2)内部固定连接有第二电机(22);
2.根据权利要求1所述的一种电气自动化机械臂支架,其特征在于,所述第一固定件(4)外部固定连接有连动杆(29),所述连动杆(29)外部转动连接有第二固定件(5)。
3.根据权利要求1所述的一种电气自动化机械臂支架,其特征在于,所述固定盒体(2)内部转动连接有第三齿轮(24)。
4.根据权利要求1所述的一种电气自动化机械臂支架,其特征在于,所述缓冲架(12)外部固定连接有传动台(6),所述传动台(6)外部固定连接有传动齿条(17),所述传动齿条(17)外部滑动连接有传动滑槽(16),所述传动滑槽(16)外部固定连接有传动壳体(7)。
5.根据权利要求4所述的一种电气自动化机械臂支架,其特征在于,所述传动壳体(7)内部固定连接有第一电机(18),所述第一电机(18)外部固定连接有第一蜗杆(13),所述第一蜗杆(13)外部啮合连接有第一蜗轮(15),所述第一蜗轮(15)外部固定连接有第一齿轮(14),所述第一齿轮(14)外部啮合连接有传动齿条(17)。
6.根据权利要求5所述的一种电气自动化机械臂支架,其特征在于,所述第一蜗杆(13)外部转动连接有传动壳体(7),所述传动壳体(7)内部转动连接有第一蜗轮(15),所述传动壳体(7)内部转动连接有第一齿轮(14)。
7.根据权利要求4所述的一种电气自动化机械臂支架,其特征在于,所述传动壳体(7)外部固定连接有支撑板(9),所述支撑板(9)外部固定连接有推把(8)。
8.根据权利要求7所述的一种电气自动化机械臂支架,其特征在于,所述支撑板(9)外部转动连接有万向轮(10),所述支撑板(9)外部固定连接有伸缩固定块(11)。
技术总结本发明涉及电气自动化技术领域,尤其涉及一种电气自动化机械臂支架,包括固定台,固定台外部固定连接有减震机构,减震机构包括连接件,连接件外部滑动连接有缓冲架,缓冲架外部转动连接有伸缩杆,伸缩杆外部转动连接有连接件,伸缩杆外部固定连接有伸缩弹簧,固定台外部固定连接有固定机构,固定连接包括固定盒体,本发明中,通过第二电机可控制固定壳体进行移动,两侧的固定壳体向固定台内的机械臂移动可对其底座形成固定,打开第三电机带动第二蜗杆转动,使得第二蜗轮和第四齿轮转动,进而带动第一固定件向内收缩,第一固定件收缩的同时可带动连动杆转动,使得第二固定件也向内收缩,增加了固定机构与机械臂底座的贴合面积,提高固定效果。技术研发人员:巨婷婷,曹青琳,王莲中,王焕章,王东燕,苏伟鸿,王延,崔文川,宋晓星,王艺璇,马晓雪受保护的技术使用者:西宁城市职业技术学院技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/52378.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表