一种嵌入式智能多米诺骨牌摆放机器人控制系统
- 国知局
- 2024-07-05 17:53:50
本发明涉及一种机器人控制系统,特别是涉及一种嵌入式智能多米诺骨牌摆放机器人控制系统。
背景技术:
1、随着计算机技术、自动控制、传感器技术及人工智能等技术的快速发展,机器人技术也在逐步升级和细化。现实生活中存在许多较为简单但耗时的任务,如果能将部分工作交给机器人,将极大节约时间和人工成本,此机器人平台就是以此为出发点,实现机器人系统代替工人完成在空旷场地上摆放上万块大型多米诺骨牌的工作。
2、目前在很多场景下摆放上万块大型多米诺骨牌的工作仍然依赖人工,需要5个人花费1周左右的时间才能完成,不仅严重浪费人力资源,而且周期较长,因此迫切需要一种嵌入式智能多米诺骨牌摆放机器人控制系统。
技术实现思路
1、本发明的目的在于提供一种嵌入式智能多米诺骨牌摆放机器人控制系统,本发明系统集自动控制、传感器检测于一体,设定好程序,从开始到结束,无需人为干预,仅1天就能实现上万块多米诺骨牌的摆放,全自动完成对多米诺骨牌的识别、抓取、装载、运输、摆放,极大提高了工作效率,节约了时间和人工成本。
2、本发明的目的是通过以下技术方案实现的:
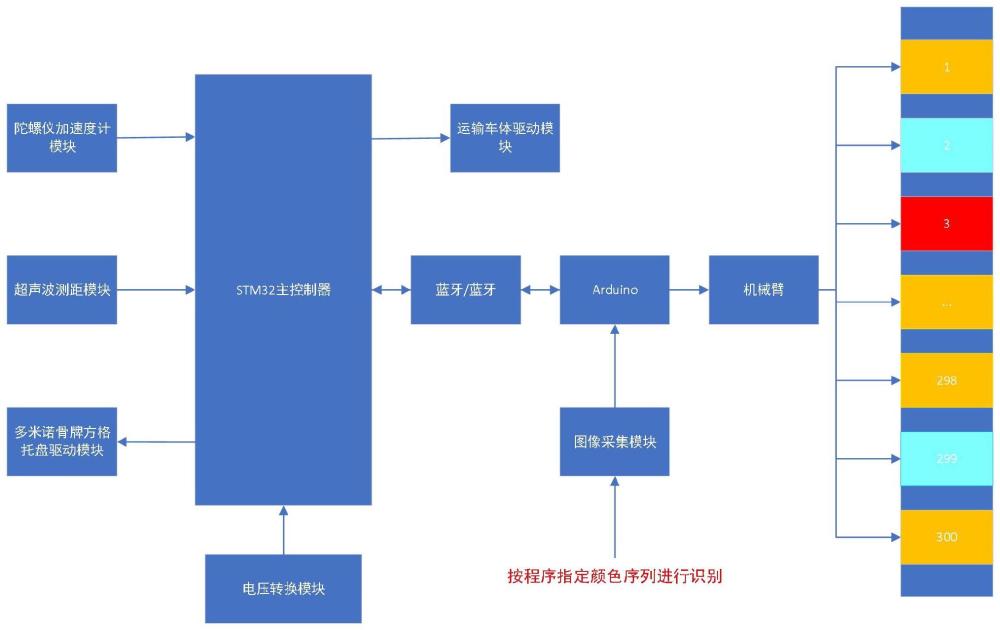
3、一种嵌入式智能多米诺骨牌摆放机器人控制系统,所述系统包括核心控制器stm32f103系列单片机、图像处理中心arduino平台、摄像头模块、陀螺仪加速度计模块、超声波避障模块、电机驱动模块、电压转换模块、蓝牙交互模块以及机器人车体,其中:
4、摄像头模块,实时采集多米诺骨牌颜色信息并处理,并将目标物体的位置坐标输出;所述陀螺仪加速度计模块,实时检测车体的角度信息,并将角度值输出;
5、超声波测距模块,实时检测车体距前方障碍的距离,并将距离输出;
6、蓝牙交互模块,实现stm32主机和arduino从机之间的数据交换;
7、主控制器接收arduino平台、陀螺仪加速度计模块、超声波测距模块等传感器反馈的信息后,经过pid算法计算然后输出pwm值给电机驱动从而控制电机完成相应的动作。
8、所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,所述摄像头模块采用pixy 2代cmucam5图像识别传感器,其内部集成一个图像处理芯片,最高支持7种颜色识别能力及色块追踪能力,能够很好满足对不同颜色多米诺骨牌的识别需求,处理图像后将目标物体位置的坐标信息通过spi通信协议传送给arduino。
9、所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,所述陀螺仪加速度计模块采用mpu6050,根据陀螺仪和加速度计的原始数据使用硬件实现卡尔曼滤波算法解算出准确的三轴姿态数据,并通过i2c通信发送给主控制器。
10、所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,所述超声波测距模块采用hc-sr04,其信号口与主控制器i/o口相连,i/o高电平的持续时间就是超声波从发射到返回的时间,然后再转换成距离就可大概得知前方障碍的位置。
11、所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,所述蓝牙交互模块采用hc-05,用于arduino从机和stm32主机之间的数据交换,任务是用来传输两个标志位,标志位一是300块多米诺骨牌装载完成与否,由从机发送给主机,0表示装载未完成,1表示装载完成;标志位二是图像传感器是否继续识别,由主机发送给从机,1表示图像识别传感器停止识别,0表示图像识别传感器继续识别。
12、所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,所述图像处理中心采用arduino_uno平台,其获取摄像头模块反馈的目标物体位置的坐标信息,并控制机械臂抓取目标物体(即某颜色的多米诺骨牌)。
13、所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,所述主控制器采用以arm-cortexm3为内核的stm32f103zet6,其负责整合arduino平台、陀螺仪加速度计模块和超声波测距模块反馈的信息,经pid等算法处理后输出pwm值给电机驱动,从而完成机器人系统路径规划模式的控制。
14、本发明的优点与效果是:
15、1.本发明机器人系统采用双cpu结构,利用arduino平台作为图像处理、传输的中心,利用stm32单片机作为整个系统控制的中心,如人体当中的大脑和小脑的关系,做到决策和控制分离。从而提高系统的安全性,并为未来工业生产中多功能一体化机器人研发提供了新思路。
16、2.本发明主控制器整合了陀螺仪加速度计、超声波模块的反馈信息后,经过精确的处理才做出对电机的实时控制,大大提高了整个系统的智能化程度。
17、3.本发明路径规划模式采用闭环控制,不仅提高了控制的精确度,也增强了机器人系统的抗干扰能力。
18、4.本发明针对人工摆放上万块多米诺骨牌,需要5个人花费1周左右的时间,造成时间和人工成本极大浪费,本发明提供一种嵌入式智能多米诺骨牌摆放机器人控制系统,本系统集自动控制、传感器检测等技术于一体,只要设定好程序,从开始到结束,无需人为干预,仅1天就能实现上万块多米诺骨牌的摆放。系统包括:核心控制器stm32f103系列单片机、图像处理中心arduino平台、摄像头模块、陀螺仪加速度计模块、超声波避障模块、电机驱动模块、电压转换模块、蓝牙交互模块以及机器人车体。本系统首先通过摄像头模块根据程序预先指定好的颜色顺序完成对多米诺骨牌的颜色识别,并将其二维坐标传输给arduino_uno,arduino控制机械臂完成对目标物体的抓取,并将其放到运输车的多米诺骨牌方格托盘中,一次性装载300块多米诺骨牌之后,开始运输多米诺骨牌到指定路径规划位置,同时arduino停止多米诺骨牌识别,直到运输、摆放完毕返回到原装载位置,才进行下一轮的识别、抓取、装载、运输、摆放。本发明主要应用于上万块多米诺骨牌的摆放场景,可全自动完成对多米诺骨牌的识别、抓取、装载、运输、摆放,极大提高了工作效率,节约了时间和人工成本。
技术特征:1.一种嵌入式智能多米诺骨牌摆放机器人控制系统,其特征在于,所述系统包括核心控制器stm32f103系列单片机、图像处理中心arduino平台、摄像头模块、陀螺仪加速度计模块、超声波避障模块、电机驱动模块、电压转换模块、蓝牙交互模块以及机器人车体,其中:
2.根据权利要求1所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,其特征在于,所述摄像头模块采用pixy 2代cmucam5图像识别传感器,其内部集成一个图像处理芯片,最高支持7种颜色识别能力及色块追踪能力,能够很好满足对不同颜色多米诺骨牌的识别需求,处理图像后将目标物体位置的坐标信息通过spi通信协议传送给arduino。
3.根据权利要求1所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,其特征在于,所述陀螺仪加速度计模块采用mpu6050,根据陀螺仪和加速度计的原始数据使用硬件实现卡尔曼滤波算法解算出准确的三轴姿态数据,并通过i2c通信发送给主控制器。
4.根据权利要求1所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,其特征在于,所述超声波测距模块采用hc-sr04,其信号口与主控制器i/o口相连,i/o高电平的持续时间就是超声波从发射到返回的时间,然后再转换成距离就可大概得知前方障碍的位置。
5.根据权利要求1所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,其特征在于,所述蓝牙交互模块采用hc-05,用于arduino从机和stm32主机之间的数据交换,任务是用来传输两个标志位,标志位一是300块多米诺骨牌装载完成与否,由从机发送给主机,0表示装载未完成,1表示装载完成;标志位二是图像传感器是否继续识别,由主机发送给从机,1表示图像识别传感器停止识别,0表示图像识别传感器继续识别。
6.根据权利要求1所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,其特征在于,所述图像处理中心采用arduino_uno平台,其获取摄像头模块反馈的目标物体位置的坐标信息,并控制机械臂抓取目标物体(即某颜色的多米诺骨牌)。
7.根据权利要求1所述的一种嵌入式智能多米诺骨牌摆放机器人控制系统,其特征在于,所述主控制器采用以arm-cortexm3为内核的stm32f103zet6,其负责整合arduino平台、陀螺仪加速度计模块和超声波测距模块反馈的信息,经pid等算法处理后输出pwm值给电机驱动,从而完成机器人系统路径规划模式的控制。
技术总结一种嵌入式智能多米诺骨牌摆放机器人控制系统,涉及一种多米诺骨牌摆放机器人控制系统,本系统首先通过摄像头模块根据程序预先指定好的颜色顺序完成对多米诺骨牌的颜色识别,并将其二维坐标传输给Arduino_Uno,Arduino控制机械臂完成对目标物体的抓取,并将其放到运输车的多米诺骨牌方格托盘中,一次性装载300块多米诺骨牌之后,开始运输多米诺骨牌到指定路径规划位置,同时Arduino停止多米诺骨牌识别,直到运输、摆放完毕返回到原装载位置,才进行下一轮的识别、抓取、装载、运输、摆放。本发明主要应用于上万块多米诺骨牌的摆放场景,可全自动完成对多米诺骨牌的识别、抓取、装载、运输、摆放,极大提高了工作效率,节约了时间和人工成本。技术研发人员:曹顺,杨海鑫受保护的技术使用者:沈阳化工大学技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49541.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表