一种注塑机用机械手的控制方法及系统与流程
- 国知局
- 2024-07-05 17:53:46
本发明涉及注塑机用机械手控制领域,特别是一种注塑机用机械手的控制方法及系统。
背景技术:
1、注塑机作为塑料成型行业的重要设备,其生产效率和质量对于整个生产流程具有至关重要的影响。为了提高注塑机的生产效率,减少人工操作,降低生产成本,注塑机用机械手应运而生。这种机械手能够自动化地完成注塑成型过程中的取料、放料、堆垛等操作,极大地提高了生产效率。在注塑机用机械手的控制方面,传统的控制方法往往采用简单的开关量控制,这种方式虽然能够实现基本的自动化操作,但在精度、速度和稳定性等方面存在较大的局限性。近年来,随着计算机技术、传感器技术和控制理论的发展,注塑机用机械手的控制方法也得到了不断的改进和创新。但是注塑材料随着注塑完成时温度变化造成的机械手抓取容易掉落和留下抓取痕迹的问题依旧存在,因此如何针对注塑机内的温度变化进而对机械手进行控制是现阶段丞待解决的技术问题。
技术实现思路
1、本发明的目的是为了解决上述问题,设计了一种注塑机用机械手的控制方法及系统。
2、实现上述目的本发明的技术方案为,进一步,在上述一种注塑机用机械手的控制方法中,所述注塑机用机械手的控制方法包括以下步骤:
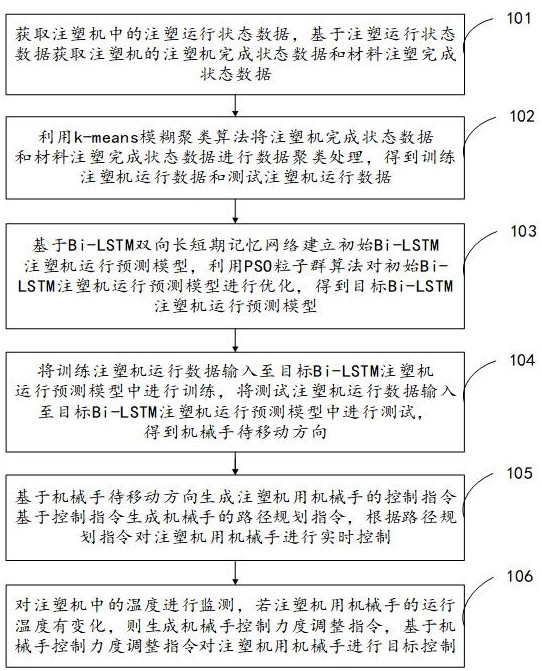
3、获取注塑机中的注塑运行状态数据,基于所述注塑运行状态数据获取注塑机的注塑机完成状态数据和材料注塑完成状态数据;
4、利用k-means模糊聚类算法将所述注塑机完成状态数据和材料注塑完成状态数据进行数据聚类处理,得到训练注塑机运行数据和测试注塑机运行数据;
5、基于bi-lstm双向长短期记忆网络建立初始bi-lstm注塑机运行预测模型,利用pso粒子群算法对所述初始bi-lstm注塑机运行预测模型进行优化,得到目标bi-lstm注塑机运行预测模型;
6、将所述训练注塑机运行数据输入至所述目标bi-lstm注塑机运行预测模型中进行训练,将所述测试注塑机运行数据输入至所述目标bi-lstm注塑机运行预测模型中进行测试,得到机械手待移动方向;
7、基于所述机械手待移动方向生成注塑机用机械手的控制指令,基于所述控制指令生成机械手的路径规划指令,根据所述路径规划指令对所述注塑机用机械手进行实时控制;
8、对所述注塑机中的温度进行监测,若所述注塑机用机械手的运行温度有变化,则生成机械手控制力度调整指令,基于所述机械手控制力度调整指令对所述注塑机用机械手进行目标控制。
9、进一步,在上述一种注塑机用机械手的控制方法中,所述获取注塑机中的注塑运行状态数据,基于所述注塑运行状态数据获取注塑机的注塑机完成状态数据和材料注塑完成状态数据,包括:
10、获取注塑机中的注塑运行状态数据,所述注塑运行状态数据至少包括注塑机温度数据、注塑机压力数据、注塑机位置数据、注塑机产量数据、注塑机工艺数据、注塑机品质数据;
11、基于所述注塑运行状态数据获取注塑机的注塑机完成状态数据和材料注塑完成状态数据;
12、所述注塑机完成状态数据为注塑机在注塑材料完成注塑后的注塑机温度数据、注塑机位置数据;
13、所述材料注塑完成状态数据为注塑材料在注塑材料完成注塑后的注塑成品温度数据、注塑成品硬度数据、注塑成品体积数据、注塑成品位置数据。
14、进一步,在上述一种注塑机用机械手的控制方法中,所述利用k-means模糊聚类算法将所述注塑机完成状态数据和材料注塑完成状态数据进行数据聚类处理,得到训练注塑机运行数据和测试注塑机运行数据,包括:
15、获取注塑机完成状态数据和材料注塑完成状态数据,将所述注塑机完成状态数据和材料注塑完成状态数据进行数据初始化,得到初始注塑机运行数据集;
16、随机选择所述初始注塑机运行数据k个初始聚类中心,得到初始注塑机运行数据的聚类中心;
17、为所述初始注塑机运行数据中的每个数据点设定初始的模糊隶属度u;
18、计算所述模糊隶属度u,对每个数据点和每个聚类中心,计算该数据点到聚类中心的欧氏距离;
19、根据欧氏距离和模糊隶属度u计算数据点属于每个聚类的模糊隶属度u1;
20、根据模糊隶属度u1计算每个聚类的新聚类中心,所述新聚类中心是所有数据点的加权平均值,其中权重为数据点对于该聚类的模糊隶属度u;
21、重复步骤,得到目标注塑机运行数据,随机抽取目标注塑机运行数据中81%的数据为训练注塑机运行数据,剩余19%的数据为测试注塑机运行数据。
22、进一步,在上述一种注塑机用机械手的控制方法中,所述基于bi-lstm双向长短期记忆网络建立初始bi-lstm注塑机运行预测模型,利用pso粒子群算法对所述初始bi-lstm注塑机运行预测模型进行优化,得到目标bi-lstm注塑机运行预测模型,包括:
23、基于bi-lstm双向长短期记忆网络建立初始bi-lstm注塑机运行预测模型,所述初始bi-lstm注塑机运行预测模型至少包括输入层、嵌入层、平均池层和输出层;
24、通过二维卷积神经网络对注塑机运行数据进行特征提取,得到双流特征后进行级联融合,得到融合注塑机运行数据;
25、将所述融合注塑机运行数据输入至transformer模块对数据权重再分配,得到权重注塑机运行数据;
26、将所述权重注塑机运行数据输入基于pso粒子群算法改进的svm支持向量机中进行分类处理;
27、通过pso粒子群算法优化svm支持向量机中的权重参数和偏置值参数,得到目标bi-lstm注塑机运行预测模型。
28、进一步,在上述一种注塑机用机械手的控制方法中,所述将所述训练注塑机运行数据输入至所述目标bi-lstm注塑机运行预测模型中进行训练,将所述测试注塑机运行数据输入至所述目标bi-lstm注塑机运行预测模型中进行测试,得到机械手待移动方向,包括:
29、将所述训练注塑机运行数据输入至所述目标bi-lstm注塑机运行预测模型中进行训练;
30、利用adam超参数优化器对所述目标bi-lstm注塑机运行预测模型的参数进行优化;
31、将交叉熵损失函数作为所述目标bi-lstm注塑机运行预测模型的损失函数;
32、利用贝叶斯优化迭代确定所述目标bi-lstm注塑机运行预测模型的最优超参数,得到机械手待移动方向;
33、所述机械手待移动方向至少包括机械手移动距离,机械手移动方向和机械手移动角度。
34、进一步,在上述一种注塑机用机械手的控制方法中,所述基于所述机械手待移动方向生成注塑机用机械手的控制指令,基于所述控制指令生成机械手的路径规划指令,根据所述路径规划指令对所述注塑机用机械手进行实时控制,包括:
35、基于所述机械手待移动方向生成注塑机用机械手的控制指令,所述控制指令包括机械手运动控制指令、机械手姿态控制指令、机械手速度控制指令、机械手力控制指令、机械手io控制指令;
36、基于所述控制指令生成机械手的路径规划指令,所述路径规划指令用于定义机械手的路径起点、路径终点、障碍物、路径速度、加速度,根据所述路径规划指令对所述注塑机用机械手进行实时控制。
37、进一步,在上述一种注塑机用机械手的控制方法中,所述对所述注塑机中的温度进行监测,若所述注塑机用机械手的运行温度有变化,则生成机械手控制力度调整指令,基于所述机械手控制力度调整指令对所述注塑机用机械手进行目标控制,包括:
38、对所述注塑机中的温度进行监测,若所述注塑机用机械手的运行温度高于初始温度12.5%,则生成机械手控制力度减小指令,基于所述机械手控制力度减小指令对机械手的抓取力度进行控制;
39、若所述注塑机用机械手的运行温度低于初始温度32%,则生成机械手控制力度增大指令,基于所述机械手控制力度增大指令对机械手的抓取力度进行控制。
40、进一步,实现所述一种注塑机用机械手的控制系统,所述注塑机用机械手的控制系统包括以下模块:
41、状态数据获取模块,用于获取注塑机中的注塑运行状态数据,基于所述注塑运行状态数据获取注塑机的注塑机完成状态数据和材料注塑完成状态数据;
42、状态数据处理模块,用于利用k-means模糊聚类算法将所述注塑机完成状态数据和材料注塑完成状态数据进行数据聚类处理,得到训练注塑机运行数据和测试注塑机运行数据;
43、预测模型建立模块,用于基于bi-lstm双向长短期记忆网络建立初始bi-lstm注塑机运行预测模型,利用pso粒子群算法对所述初始bi-lstm注塑机运行预测模型进行优化,得到目标bi-lstm注塑机运行预测模型;
44、机械手待移动模块,用于将所述训练注塑机运行数据输入至所述目标bi-lstm注塑机运行预测模型中进行训练,将所述测试注塑机运行数据输入至所述目标bi-lstm注塑机运行预测模型中进行测试,得到机械手待移动方向;
45、机械手控制模块,用于基于所述机械手待移动方向生成注塑机用机械手的控制指令,基于所述控制指令生成机械手的路径规划指令,根据所述路径规划指令对所述注塑机用机械手进行实时控制;
46、机械手调整模块,用于对所述注塑机中的温度进行监测,若所述注塑机用机械手的运行温度有变化,则生成机械手控制力度调整指令,基于所述机械手控制力度调整指令对所述注塑机用机械手进行目标控制。
47、进一步,在上述一种注塑机用机械手的控制系统中,所述状态数据处理模块包括以下子模块:
48、获取子模块,用于获取注塑机完成状态数据和材料注塑完成状态数据,将所述注塑机完成状态数据和材料注塑完成状态数据进行数据初始化,得到初始注塑机运行数据集;
49、随机子模块,用于随机选择所述初始注塑机运行数据k个初始聚类中心,得到初始注塑机运行数据的聚类中心;
50、设定子模块,用于为所述初始注塑机运行数据中的每个数据点设定初始的模糊隶属度u;
51、距离子模块,用于计算所述模糊隶属度u,对每个数据点和每个聚类中心,计算该数据点到聚类中心的欧氏距离;
52、计算子模块,用于根据欧氏距离和模糊隶属度u计算数据点属于每个聚类的模糊隶属度u1;
53、加权子模块,用于根据模糊隶属度u1计算每个聚类的新聚类中心,所述新聚类中心是所有数据点的加权平均值,其中权重为数据点对于该聚类的模糊隶属度u;
54、得到子模块,用于重复步骤,得到目标注塑机运行数据,随机抽取目标注塑机运行数据中81%的数据为训练注塑机运行数据,剩余19%的数据为测试注塑机运行数据。
55、进一步,在上述一种注塑机用机械手的控制系统中,所述预测模型建立模块包括以下子模块:
56、建立子模块,用于基于bi-lstm双向长短期记忆网络建立初始bi-lstm注塑机运行预测模型,所述初始bi-lstm注塑机运行预测模型至少包括输入层、嵌入层、平均池层和输出层;
57、融合子模块,用于通过二维卷积神经网络对注塑机运行数据进行特征提取,得到双流特征后进行级联融合,得到融合注塑机运行数据;
58、输入子模块,用于将所述融合注塑机运行数据输入至transformer模块对数据权重再分配,得到权重注塑机运行数据;
59、分类子模块,用于将所述权重注塑机运行数据输入基于pso粒子群算法改进的svm支持向量机中进行分类处理;
60、参数子模块,用于通过pso粒子群算法优化svm支持向量机中的权重参数和偏置值参数,得到目标bi-lstm注塑机运行预测模型。
61、其有益效果在于,机械手能够实现对注塑件的自动识别、定位和抓取,从而进一步提高生产效率和准确性。而人工智能技术的应用则可以使机械手具备学习能力,通过不断的学习和优化,逐渐提高其操作精度和效率。还可以对注塑机的温度进行监测,从而根据注塑成品的实时状态调整机械手的抓取力度大小,防止因为机械手的抓取力度过大或者过小造成的注塑成品具有抓取痕迹和掉落,提升机械手的抓取精确度和准确度。
本文地址:https://www.jishuxx.com/zhuanli/20240617/49533.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种冲击扳手的制作方法
下一篇
返回列表