一种老年人的健康运动陪伴机器人
- 国知局
- 2024-07-05 17:53:39
本发明涉及智能机器人和老人服务领域,具体涉及一种老年人的健康运动陪伴机器人。
背景技术:
1、独居状态往往使得老年人长时间处于静止状态,缺乏足够的身体运动,同时也减少了他们的社交活动。这种生活方式不仅可能导致身体健康问题的加剧,还可能影响到老年人的心理健康和生活质量。
2、传统的解决方案包括参加健身课程、定期外出活动等,但这些方法往往受到老年人身体状况、天气等因素的限制,且很难持续进行。此外,一些老年人由于身体机能下降或缺乏动力,对于主动参与运动的意愿不强,使得传统运动方式难以实施。
3、在科技不断发展的今天,机器人技术已经取得了巨大的进步,为人类生活带来了许多便利和创新,机器人的功能也越来越丰富,现有的机器人技术在工业生产、医疗护理、娱乐等领域已经取得了广泛的应用,为老年健康管理提供了新的可能性。现有的机器人大多采用舞蹈动作固化编程的方式进行运动,需要对每个动作进行编码,一般有通过软件设置、或者通过手动固定舞蹈动作;并且传统的动作捕捉技术,需要采用专用设备,使用很不方便,这种功能上的单一性和局限性,使得机器人在提供健身服务方面的效果有限。
4、为了克服上述现有技术的缺陷,本发明的目的在于提供一种老年人的健康运动陪伴机器人,能够克服传统运动方式的种种限制,通过实时动作识别实现动作跟随和动作矫正的机器人系统,为老年人提供一种有趣、便捷、安全的健康活动方式,以达到促进身心健康、提升生活质量的目的。
技术实现思路
1、本发明所要解决的技术问题是提供一种能够实现适用于老年人的健康运动陪伴机器人,能够让机器人与老年人一起完成运动动作和错误动作矫正。
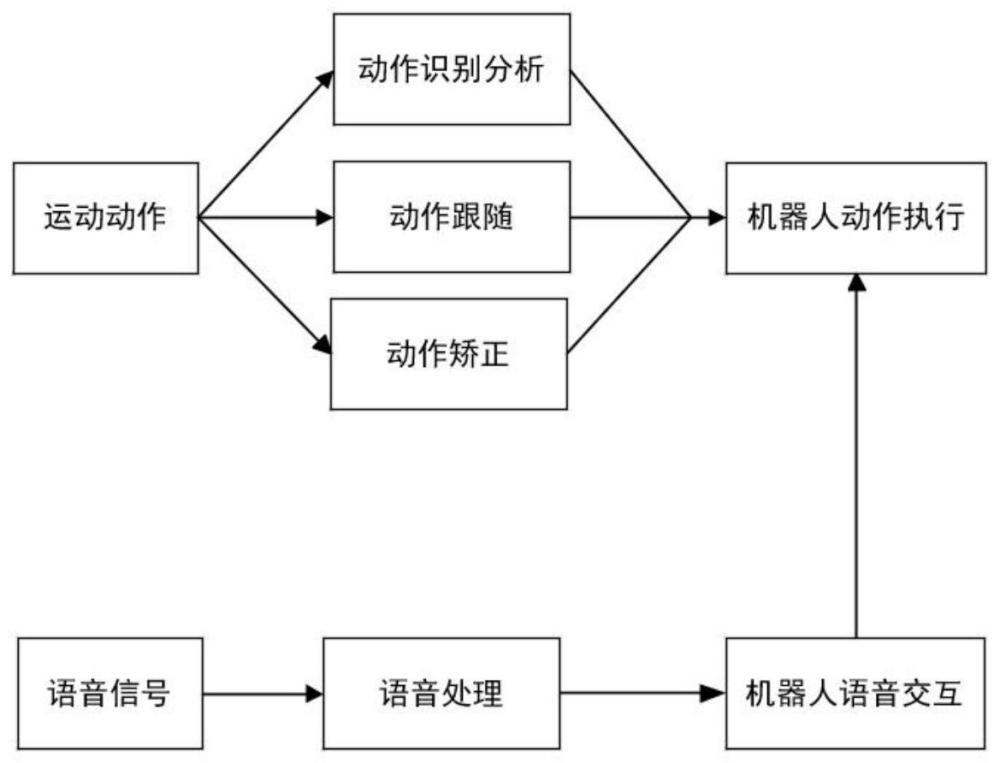
2、本发明解决其技术问题所采用的技术方案是:提供一种老年人的健康运动陪伴机器人,包括:动作识别分析模块,用于基于深度学习的轻量化人体姿态估计网络对人体动作进行识别并计算各个关节的角度;动作跟随模块,用于根据动作识别分析模块的结果计算机器人舵机需要转动的位置信息,通过pid控制机器人运动;动作矫正模块,用于帮助老年人正确规范的完成运动动作;语音模块,用于基于语音交互功能完成对机器人的语音交流和控制。
3、所述动作识别分析模块在识别和分析过程中,首先构建轻量级人体姿态估计网络模型blazepose,提取通过摄像头采集的经过预处理图像,blazepose对接收到的预处理后的图像进行处理并识别图像中人体姿态,得到人体姿态关键点坐标与图像,然后通过向量角度计算出各个关节的角度。
4、所述动作跟随模块在对机器人进行控制时首先定义各个关节的节点编号,根据动作识别分析模块得到的关节角度求出机器人各个节点舵机需要转动的信息,初始化pid的参数,在舵机运行时加入时间函数,计算舵机当前角度与目标角度误差,以及变化时间和采样时间数值,更新pid参数。通过pid控制实现机器人的动作跟随。
5、所述动作矫正模块,首先根据世界卫生组织发布的运动指南,制定了适用于老年人的运动动作集,该动作集包括了一系列在促进老年人健康的运动动作,其中重点关注了适合老年人完成的舒展运动、灵活性训练等,还涵盖了被广泛认可的中国传统健身操动作,如八段锦的动作集合。根据预设的动作集,设定每个动作集的标准运动规范,即正确的姿势和动作要求。当动作识别分析模块发现用户的动作存在不规范或不正确的情况时,运动矫正模块通过语音提示和动作示范提供反馈和指导。
6、所述语音模块,基于语音分析和交互功能,调用百度语音识别api实现语音和文本相互转换后进行文本分析,实现根据用户的语音指令执行相应的操作,在动作矫正时使用百度语音识别的语音合成功能,及时提醒用户进行矫正。
7、有益效果
8、由于采用了上述的技术方案,本发明与现有技术相比,具有以下的优点和积极效果:本发明针对动作识别和姿态分析及其在机器人中的应用方法进行分析与应用,不同于传统的健身机器人,充分利用深度学习在图像识别领域的优势,创新的运用轻量化的深度学习网络实现对用户动作的准确识别和姿态分析。同时也不同于传统运动方式,根据老年人的身体特质制定了适宜的运动动作,提供个性化以及实时监测矫正的功能,减少了运动过程中可能发生的意外和伤害,克服传统运动方式的种种限制,提高了健身运动的安全性以及便捷性。
技术特征:1.一种老年人的健康运动陪伴机器人,其特征在于,包括:动作识别分析模块,基于深度学习的轻量化人体姿态估计网络;动作跟随模块,用于根据所述动作识别分析模块的输出结果,计算出机器人各舵机需要转动的位置信息,并通过pid控制算法驱动舵机精确转动,实现对用户动作的跟随;动作矫正模块,用于将老年人的实际运动动作与预先设定的标准运动动作库进行比对,当两者偏差超过预设阈值时,向老年人发出语音提示和指导,帮助纠正动作姿势;语音交互模块,包含语音唤醒、语音识别和语音合成功能,用于实现对所述机器人的语音控制和交互。
2.根据权利要求1所述一种老年人的健康运动陪伴机器人,其特征在于,所述动作识别分析模块进一步包括:采用谷歌公司的轻量级人体姿态估计网络blazepose对人体运动动作进行识别和分析,提取通过摄像头采集的经过预处理图像,blazepose处理预处理后的图像识别图像中人体姿态,得到人体姿态关键点坐标与图像,并通过向量角度计算出各个关节的角度。
3.根据权利要求1所述一种老年人的健康运动陪伴机器人,其特征在于,所述动作跟随模块进一步包括:定义各个关节的节点编号,并根据动作识别分析模块得到的关节角度求出机器人各个节点舵机需要转动的信息;初始化pid的参数,在舵机运行时加入时间函数,以实现对机器人舵机精确控制。
4.根据权利要求1所述一种老年人的健康运动陪伴机器人,其特征在于,所述动作矫正模块进一步包括:基于世界卫生组织发布的运动指南,制定适用于老年人的运动动作集;当动作识别分析模块发现用户的动作存在不规范或不正确的情况时,通过语音提示和动作示范提供反馈和指导。
5.根据权利要求1所述一种老年人的健康运动陪伴机器人,其特征在于,所述语音模块进一步包括:调用百度语音识别api实现语音和文本相互转换后进行文本分析;在动作矫正时使用百度语音识别的语音合成功能,及时提醒用户进行矫正。
6.根据权利要求1所述一种老年人的健康运动陪伴机器人,其特征在于,所述机器人还包括:树莓派4b开发板作为控制中心;raspberry pi camera module 3作为机器人的摄像头捕捉运动姿态;总线多级舵机作为机器人的关节控制装置;通过socket技术实现树莓派与机器人摄像头、云端服务器和舵机之间的交互。
7.根据权利要求2所述的方法,其特征在于,所述轻量级人体姿态估计网络blazepose部署在云端服务器上,本地控制终端通过网络传输方式与云端进行交互,规避了本地终端算力有限的缺陷。
8.根据权利要求4所述的方法,其特征在于,所述动作矫正模块设有可调节的误差容许范围,误差容许范围设置为35%,仅当用户实际运动动作与标准动作库中动作的偏差超过该误差范围时,才向用户发出矫正提示,以适应不同老年人的身体状况差异。
9.根据权利要求4所述的方法,其特征在于,所述标准运动动作库包含舒展操、灵活性训练以及中国传统健身操等多类适合老年人的运动动作集合。
10.根据权利要求7所述的方法,其特征在于,所述本地控制终端采用树莓派4b开发板,通过socket技术与云端服务器实现实时数据交互。
技术总结本发明涉及一种老年人的健康运动陪伴机器人,旨在解决由于现代生活节奏加快和人口老龄化趋势加剧而导致的老年人缺乏足够身体运动和社交活动的问题。通过实时动作识别、动作跟随、动作矫正和语音交互技术,为老年人提供一种安全便捷的健康活动方式。使用轻量级人体姿态估计网络BlazePose对人体动作进行识别,基于关键角度计算舵机转动位置,并采用PID控制舵机转动。本发明部署轻量级人体姿态估计网络,以树莓派4B为控制中心,通过socket技术实现与云端的交互,保证了动作识别的精准高效和实时性,同时克服了终端处理能力的限制,本发明突破传统运动方式的局限,利用智能化技术提高了老年人的生活质量,促进了老年人的身心健康。技术研发人员:郭滨,卢穗,刘晓钦,吴锦双,马卫娇,李鲁,房佳乐,孙伟恒,许清华,区嘉伟,任帅祥,王浩宇受保护的技术使用者:长春理工大学技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49523.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表