信息处理装置、信息处理方法和机器人控制系统与流程
- 国知局
- 2024-07-05 17:53:47
本技术涉及能够控制机器人臂的驱动的信息处理装置、信息处理方法和机器人控制系统。
背景技术:
1、专利文献1已公开了一种附接到机器人臂的连杆部分的触觉传感器。该触觉传感器由柔软材料形成为片状。因而,该触觉传感器可以通过缠绕在连杆部分周围而容易地附接。此外,该触觉传感器不需要附接到机器人臂的关节,因此它不干扰机器人臂的操作。
2、引文列表
3、专利文献
4、专利文献1:日本专利申请特许公开no.2003-071778
技术实现思路
1、技术问题
2、重要的是在使用期间精确地操作这样的机器人臂。
3、鉴于上述情况,本技术的目的是提供能够精确地操作机器人臂的信息处理装置、信息处理方法和机器人控制系统。
4、问题的解决方案
5、为了实现上述目的,根据本技术的实施例的信息处理装置包括刚度控制单元。
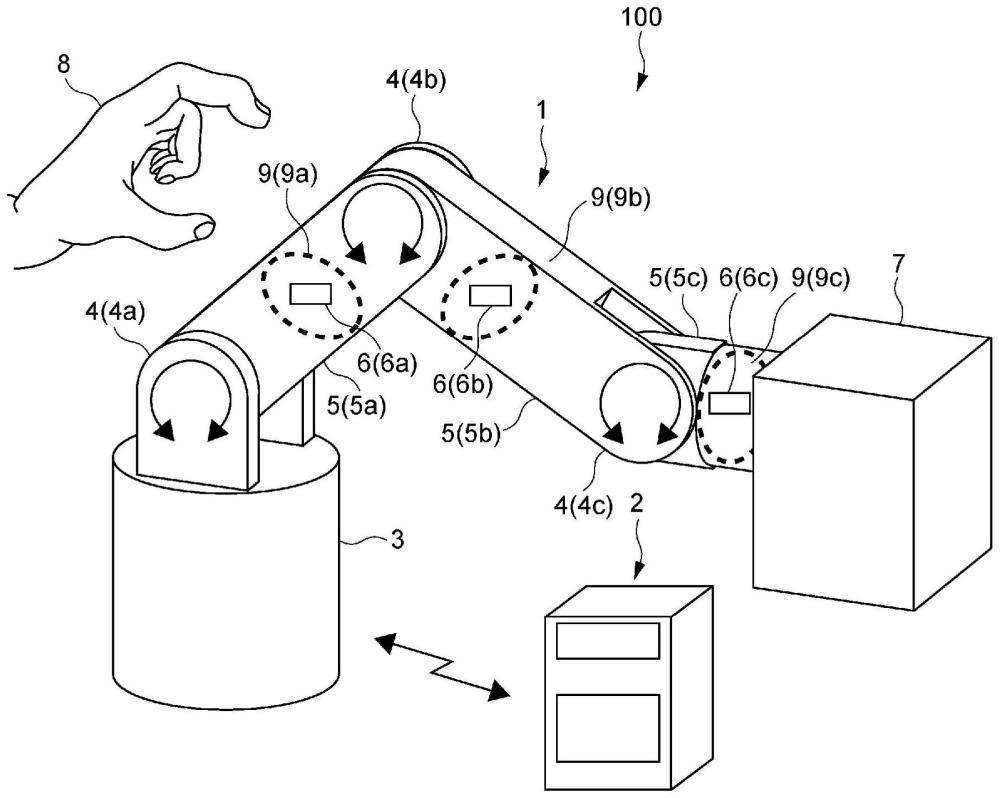
6、刚度控制单元基于设置在使用机器人臂的关节作为基准的位置处的压力传感器的检测结果,控制与机器人臂的关节的驱动有关的刚度。
7、在该信息处理装置中,基于压力传感器的检测结果来控制与机器人臂的关节的驱动有关的刚度。因而,可以精确地驱动机器人臂。
8、所述信息处理装置还可以包括存储单元,所述存储单元将由刚度控制单元设定的刚度和通过关节的驱动引起的机器人臂的动作彼此相关联地存储。
9、在选择了操作者移动机器人臂并存储预定动作的直接教学模式的情况下,存储单元可以将刚度和动作彼此相关联地存储。
10、机器人臂可以包括一个或多个关节和一个或多个连杆,所述一个或多个连杆通过所述一个或多个关节中的每个关节的驱动而旋转或平移。在这种情况下,刚度控制单元可以控制与所述一个或多个连杆的旋转或平移有关的刚度。
11、所述信息处理装置还可以包括存储单元,所述存储单元将由刚度控制单元设定的刚度和通过关节的驱动引起的连杆的轨迹(track)彼此相关联地存储。
12、在选择了操作者移动连杆并存储预定轨迹的直接教学模式的情况下,所述存储单元可以将刚度和轨迹彼此相关联地存储。
13、刚度控制单元可以控制刚度随着由压力传感器检测到的压力的增加而增加。
14、压力传感器可以被设置在当操作者移动连杆时作为连杆的把持(hold)目标的区域中。
15、所述信息处理装置还可以包括通知控制单元,所述通知控制单元控制由刚度控制单元设定的刚度的通知。
16、通知控制单元可以控制刚度的值的显示、与刚度的水平相应的量计(gauge)的显示、与刚度的水平相应的颜色的显示、或者刚度的音频输出中的至少一个。
17、通知控制单元可以根据由刚度控制单元设定的刚度,设定当操作者移动连杆并进行教学时的教学用刚度。
18、通知控制单元可以将教学用刚度设定为随着由刚度控制单元设定的刚度的增加而增加。
19、刚度控制单元可以保持由压力传感器检测到的压力的最大值,并根据保持的最大值来设定刚度。
20、刚度控制单元可以在对于压力传感器输入了预定操纵的情况下降低刚度。
21、所述预定操纵可以包括抚触(stroke)操纵。
22、压力传感器可以是触觉传感器。
23、根据本技术的实施例的信息处理方法是由计算机系统执行的信息处理方法,并且包括基于设置在使用机器人臂的关节作为基准的位置处的压力传感器的检测结果,控制与机器人臂的关节的驱动有关的刚度。
24、根据本技术的实施例的机器人控制系统包括机器人臂、压力传感器和刚度控制单元。
技术特征:1.一种信息处理装置,包括
2.根据权利要求1所述的信息处理装置,还包括
3.根据权利要求2所述的信息处理装置,其中
4.根据权利要求1所述的信息处理装置,其中
5.根据权利要求4所述的信息处理装置,还包括
6.根据权利要求5所述的信息处理装置,其中
7.根据权利要求4所述的信息处理装置,其中
8.根据权利要求4所述的信息处理装置,其中
9.根据权利要求1所述的信息处理装置,还包括
10.根据权利要求9所述的信息处理装置,其中
11.根据权利要求9所述的信息处理装置,其中
12.根据权利要求11所述的信息处理装置,其中
13.根据权利要求1所述的信息处理装置,其中
14.根据权利要求13所述的信息处理装置,其中
15.根据权利要求14所述的信息处理装置,其中
16.根据权利要求1所述的信息处理装置,其中
17.一种由计算机系统执行的信息处理方法,包括
18.一种机器人控制系统,包括:
技术总结根据本技术的实施例的信息处理装置包括刚度控制单元。所述刚度控制单元基于设置在使用机器人臂的关节作为基准的位置处的压力传感器的检测结果,控制与机器人臂的关节的驱动有关的刚度。在该信息处理装置中,例如,操作者能够在输入动作的时候同时设定刚度,因此减少了与动作的输入和刚度的设定相关联的操作者的劳动。因而,可以精确地驱动机器人臂。技术研发人员:铃木洋贵受保护的技术使用者:索尼集团公司技术研发日:技术公布日:2024/6/2本文地址:https://www.jishuxx.com/zhuanli/20240617/49535.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表