一种送餐机器人送餐组件的制作方法
- 国知局
- 2024-07-08 11:14:59
本技术涉及机器人,尤其涉及一种送餐机器人送餐组件。
背景技术:
1、送餐机器人是一种智能化的移动设备,旨在将食物、饮料等物品从厨房或储存区域运送到消费者所在的位置,如餐桌、办公室或客房,这种机器人结合了自动导航、传感技术和物品搬运功能,以提供便捷的送餐服务,送餐机器人通过激光雷达、摄像头、超声波传感器等多种导航技术,机器人能够识别周围环境、障碍物和路径,并规划合适的行进路线,同时部分送餐机器人还配备了触摸屏、语音识别等交互界面。
2、根据专利号为cn211890852u,一种多功能送餐机器人用送餐组件,通过所述餐盘上放置菜品,所述机器人本体进行移动送餐,前进过程中所述餐盘由于惯性对所述夹爪和所述伸缩臂施加作用力,使所述伸缩臂带动所述活塞在所述液压缸内滑动,通过所述活塞和所述液压缸的挤压进行减震,减缓所述伸缩臂的滑动,所述夹爪通过所述弹性垫与所述餐盘接触,对所述餐盘的左右两侧进行夹持,所述餐盘在左右晃动时受到所述弹性垫的回弹力,减缓所述餐盘的晃动幅度,如此能使所述机器人本体在移动过程中减少餐盘的位移幅度,减少所述餐盘上的菜品晃动,能保持菜品的摆盘效果。
3、现有的送餐机器人送餐效率较低,通常情况下一次只能携带一个餐盘,送餐的额数量有限,需要机器人反复工作,导致能源消耗过高。
技术实现思路
1、本实用新型的目的是为了解决现有技术送餐机器人送餐效率较低,能源消耗高的问题的技术问题,而提出的一种送餐机器人送餐组件。
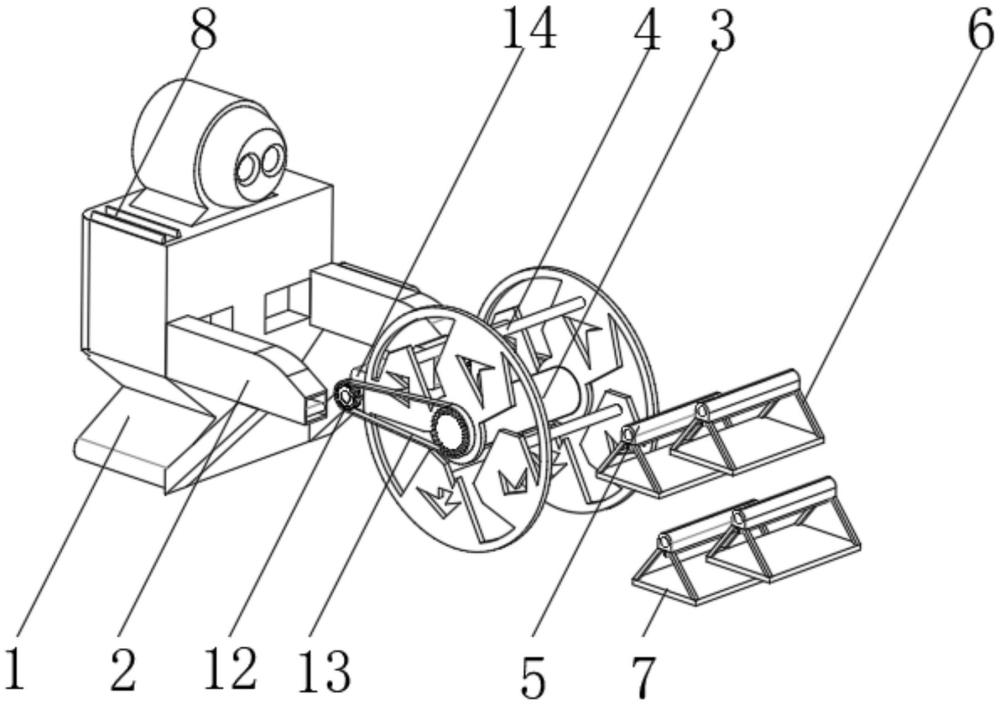
2、为了实现上述目的,本实用新型采用了如下技术方案:一种送餐机器人送餐组件,包括机体,所述机体正面安装有机臂,两个机臂之间设有转轮,所述转轮的表面圆周阵列有连接杆,所述连接杆的表面套接有套杆,所述套杆的底部设有餐盘,所述餐盘的顶面连接有平衡吊绳,且平衡吊绳的一端与套杆底面连接,机体的内部开设有放置腔,一侧所述机臂内部开设有输送腔,另一侧所述机臂侧面安装有交互面板。
3、优选的,所述转轮的两端与机臂的连接处轴承连接,且套杆与连接杆表面活动连接。
4、优选的,所述连接杆的两端与转轮两侧外壳的连接处螺纹连接,且相邻的平衡吊绳与餐盘之间形成的形状为等边三角形。
5、优选的,所述机体正面的凹槽内安装有驱动件,所述驱动件的转动端和转轮的两端均设有链轮。
6、优选的,两个所述链轮之间设有链条,且链条的两端与链轮表面套接。
7、优选的,所述输送腔贯穿至放置腔内,所述输送腔内设有输送带,且输送带的一端位于放置腔内。
8、有益效果
9、本实用新型中,增加餐盘的数量,使送餐机器人可依次携带多个餐盘一次性将多份餐品送至目的地,从而显著提高送餐效率,减少了多次单独送餐的时间和劳动成本,同时与现有送餐机器人反复多次送餐运动,大大降低了能源消耗,并将餐盘与转轮连接,餐盘由于收到重力的作用,方向始终竖直向下,餐盘凭借重力保持方向始终垂直于地面的,在转盘转动时可将对应的餐盘转动至机器人的正面,方便人员将餐品进行取放,结构简单,便于后期对结构进行维修或零部件的更换。
技术特征:1.一种送餐机器人送餐组件,包括机体(1),其特征在于:所述机体(1)正面安装有机臂(2),两个机臂(2)之间设有转轮(3),所述转轮(3)的表面圆周阵列有连接杆(4),所述连接杆(4)的表面套接有套杆(5),所述套杆(5)的底部设有餐盘(7),所述餐盘(7)的顶面连接有平衡吊绳(6),且平衡吊绳(6)的一端与套杆(5)底面连接,机体(1)的内部开设有放置腔(8),一侧所述机臂(2)内部开设有输送腔(9),另一侧所述机臂(2)侧面安装有交互面板(11)。
2.根据权利要求1所述的一种送餐机器人送餐组件,其特征在于:所述转轮(3)的两端与机臂(2)的连接处轴承连接,且套杆(5)与连接杆(4)表面活动连接。
3.根据权利要求1所述的一种送餐机器人送餐组件,其特征在于:所述连接杆(4)的两端与转轮(3)两侧外壳的连接处螺纹连接,且相邻的平衡吊绳(6)与餐盘(7)之间形成的形状为等边三角形。
4.根据权利要求1所述的一种送餐机器人送餐组件,其特征在于:所述机体(1)正面的凹槽内安装有驱动件(14),所述驱动件(14)的转动端和转轮(3)的两端均设有链轮(12)。
5.根据权利要求4所述的一种送餐机器人送餐组件,其特征在于:两个所述链轮(12)之间设有链条(13),且链条(13)的两端与链轮(12)表面套接。
6.根据权利要求1所述的一种送餐机器人送餐组件,其特征在于:所述输送腔(9)贯穿至放置腔(8)内,所述输送腔(9)内设有输送带(10),且输送带(10)的一端位于放置腔(8)内。
技术总结本技术提供一种送餐机器人送餐组件,涉及机器人技术领域,包括机体,所述机体正面安装有机臂,两个机臂之间设有转轮,所述转轮的表面圆周阵列有连接杆,所述连接杆的表面套接有套杆,所述套杆的底部设有餐盘,所述餐盘的顶面连接有平衡吊绳,且平衡吊绳的一端与套杆底面连接,机体的内部开设有放置腔,一侧所述机臂内部开设有输送腔,另一侧所述机臂侧面安装有交互面板,增加餐盘的数量,使送餐机器人可依次携带多个餐盘一次性将多份餐品送至目的地,从而显著提高送餐效率,减少了多次单独送餐的时间和劳动成本,同时与现有送餐机器人反复多次送餐运动,大大降低了能源消耗。技术研发人员:杨蕴璇,孙永鹏受保护的技术使用者:广州市立达机器人有限公司技术研发日:20231126技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/52677.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表