一种静态堆码机器人装置的制作方法
- 国知局
- 2024-07-08 11:14:54
本技术涉及堆码机器人,具体为一种静态堆码机器人装置。
背景技术:
1、静态堆码机器人是一种用于堆码操作的自动化设备,它能够将物品按照一定规则堆叠起来,实现高效的堆码作业,静态堆码机器人装置能够大大提高堆码操作的效率和准确性,减少人工操作的工作量和错误率。它广泛应用于物流、仓储、制造等领域,可以实现自动化的堆码作业。
2、现有的静态堆码机器人,在使用时,将物品从一个地方移动至另一个地方,有规则的堆叠起来,在对物品进行抓取时,通过摄像头或其他传感器,可以实时获取物品的位置、形状和尺寸等信信息,使机器人进行准确的抓取和堆叠,但是现有的堆码机器人在抓取不同规格的物品时,需要工作人员实现调整好爪子的行程,避免抓取不牢,每次更换抓取的物品时,均需要进行调整,操作较为麻烦,存在便捷性较差的缺点,为满足使用需求,现急需一种方便使用的机器人抓取装置。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种静态堆码机器人装置,解决了上述背景技术中提出的问题。
3、(二)技术方案
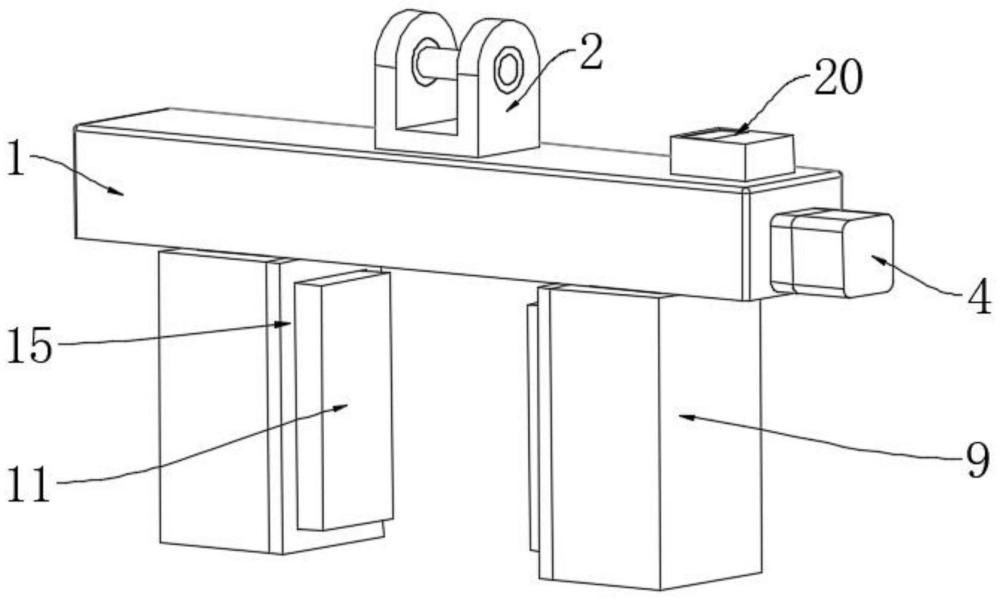
4、为实现以上目的,本实用新型通过以下技术方案予以实现:一种静态堆码机器人装置,包括安装座,所述安装座的上表面固定连接有连接件,连接件与机器人的多关节手臂连接,安装座的下表面开设有第一滑槽,第一滑槽的表面滑动连接有第一滑块,第一滑块的下表面固定连接有卡爪,卡爪的内侧面设置有橡胶垫,卡爪的内侧面开设有凹槽,凹槽的表面滑动连接有触发块,凹槽的内侧面固定连接有第二弹簧,第二弹簧的另一端固定连接有活动块,活动块的表面安装有触点,触发块的内侧面安装有触头。
5、可选的,所述安装座的侧面安装有伺服电机,伺服电机的输出端固定连接有双向丝杠,双向丝杠的两端通过轴承与第一滑槽的内侧面转动连接,双向丝杠的表面螺纹连接有第一滑块。
6、可选的,所述第一滑槽的顶面开设有第二滑槽,第一滑块的上表面固定连接有第二滑块,第二滑槽的表面滑动连接有第二滑块。
7、可选的,所述第一滑块和卡爪的数量均为两个,且呈对称分布。
8、可选的,所述凹槽的内侧面固定连接有第一弹簧,第一弹簧的另一端固定连接有触发块,凹槽的侧面开设有第三滑槽,触发块的侧面固定连接有第三滑块,第三滑槽的表面滑动连接有第三滑块。
9、可选的,所述触点和触头的位置相对照,安装座的上表面安装有控制器,控制器通过导线与伺服电机电性连接,触点和触头设置在控制器控制伺服电机停止的电路上。
10、(三)有益效果
11、本实用新型提供了一种静态堆码机器人装置,具备以下有益效果:
12、1、该一种静态堆码机器人装置,通过触发块、触点、触头和控制器的设置,使该静态堆码机器人装置具备了自动控制卡爪向内移动的距离的效果,使用时,机器人手臂上的摄像头或其他传感器,实时获取物品的位置、形状和尺寸等信息,以便机器人进行准确的抓取和堆叠,在抓取到货物而的过程中,两个卡爪位于货物的两侧,通过伺服电机控制双向丝杠正转,使双向丝杠两侧表面螺纹连接的第一滑块在第一滑槽内同步向内移动,第一滑块移动的过程中,第一滑块上表面的第二滑块在第二滑槽内滑动,起到了限位的作用,两个第一滑块移动的同时带动卡爪一起移动,进而使两个卡爪的内侧靠近物品,对物品抓取的过程中,首先卡爪内侧的触发块与物品先接触,接触后,触发块受到挤压进入到凹槽内,随着卡爪的急需移动,触发块完全进入到凹槽内,触发块完全进入到凹槽内的同时,橡胶垫与物品接触并对物品进行夹紧,触发块内侧的触头与触点发生接触,由于触点和触头随着在控制器控制伺服电机停止的电路上,此时电路闭合,使伺服电机自动停止,正好将物品抓取,该机器人装置,无需工作人员手动调整卡爪的工作行程,即可完美的对不同规格的物品进行抓取,达到了提高使用的便捷性的目的。
13、2、该一种静态堆码机器人装置,通过第二弹簧和活动块的设置,使该静态堆码机器人装置具备了保护触点和触头的效果,使用时,触点和触头接触后,在第二弹簧和活动块的作用下,起到了缓冲触点的作用,避免了触点和触头发生硬性接触,导致使触点和触头损坏,进而达到了保护电器元件的目的。
技术特征:1.一种静态堆码机器人装置,包括安装座,其特征在于:所述安装座的上表面固定连接有连接件,连接件与机器人的多关节手臂连接,安装座的下表面开设有第一滑槽,第一滑槽的表面滑动连接有第一滑块,第一滑块的下表面固定连接有卡爪,卡爪的内侧面设置有橡胶垫,卡爪的内侧面开设有凹槽,凹槽的表面滑动连接有触发块,凹槽的内侧面固定连接有第二弹簧,第二弹簧的另一端固定连接有活动块,活动块的表面安装有触点,触发块的内侧面安装有触头。
2.根据权利要求1所述的一种静态堆码机器人装置,其特征在于:所述安装座的侧面安装有伺服电机,伺服电机的输出端固定连接有双向丝杠,双向丝杠的两端通过轴承与第一滑槽的内侧面转动连接,双向丝杠的表面螺纹连接有第一滑块。
3.根据权利要求1所述的一种静态堆码机器人装置,其特征在于:所述第一滑槽的顶面开设有第二滑槽,第一滑块的上表面固定连接有第二滑块,第二滑槽的表面滑动连接有第二滑块。
4.根据权利要求2所述的一种静态堆码机器人装置,其特征在于:所述第一滑块和卡爪的数量均为两个,且呈对称分布。
5.根据权利要求1所述的一种静态堆码机器人装置,其特征在于:所述凹槽的内侧面固定连接有第一弹簧,第一弹簧的另一端固定连接有触发块,凹槽的侧面开设有第三滑槽,触发块的侧面固定连接有第三滑块,第三滑槽的表面滑动连接有第三滑块。
6.根据权利要求1所述的一种静态堆码机器人装置,其特征在于:所述触点和触头的位置相对照,安装座的上表面安装有控制器,控制器通过导线与伺服电机电性连接,触点和触头设置在控制器控制伺服电机停止的电路上。
技术总结本技术公开了一种静态堆码机器人装置,涉及堆码机器人技术领域,包括安装座,安装座的上表面固定连接有连接件,连接件与机器人的多关节手臂连接,安装座的下表面开设有第一滑槽,第一滑槽的表面滑动连接有第一滑块,第一滑块的下表面固定连接有卡爪,卡爪的内侧面设置有橡胶垫,卡爪的内侧面开设有凹槽,凹槽的表面滑动连接有触发块,凹槽的内侧面固定连接有第二弹簧,第二弹簧的另一端固定连接有活动块,活动块的表面安装有触点,触发块的内侧面安装有触头,本技术通过触发块、触点、触头和控制器的设置,达到了提高使用的便捷性的目的,通过第二弹簧和活动块的设置,达到了保护电器元件的目的。技术研发人员:刘辉,秦国防,王若冰,张小元,许建波,李小伟,王国栋受保护的技术使用者:济源市新东方彩印包装有限公司技术研发日:20231116技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/52666.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表