一种仿真机械手的制作方法
- 国知局
- 2024-07-08 11:14:52
本申请涉及机械手,具体涉及一种仿真机械手。
背景技术:
1、机械手是指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置;机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门;随着技术的发展出现了仿真机械手,仿真机械手是根据人体手部结构制造出来的机械手,能代替人手来实现各种操作,仿真机械手的功能越来越多元化,通过母指与其余四指的配合,能模拟人手的各种仿真动作。
2、经过检索,检索到现有技术如下:中国专利申请号为:202110103837.9、授权公告号为: cn112659167b的仿真机械手的手掌折合结构中,公开了一种技术方案,包括支座、上掌块、母指支撑块和电机,所述母指支撑块转动设置在所述支座上,所述上掌块通过转轴竖向转动设置在所述支座上,所述电机安装在所述支座上并与所述母指支撑块传动连接,所述母指支撑块与所述上掌块之间设有驱动所述上掌块与所述母指支撑块反向转动的连动结构;该发明利用电机驱动母指支撑块在支座上转动,由设置在母指支撑块与上掌块之间的连动结构驱动上掌块在支座上与母指支撑块反向转动,实现母指与上掌块之间的折合,方便仿真机械手的母指与其余四指配合做出各种操作;同时,连动性强,方便控制,且结构简单紧凑,可在仿真机械手的较小空间内安装使用。
3、该专利申请中母指与手掌之间的连动性较好,但是该申请中人手无法插入至仿真机械手内;申请人经过详细的检索,并未发现无人体插入或有人体插入均可正常工作的仿真/生机械手。
4、因此,需要提供一种新的技术方案来解决上述技术问题。
技术实现思路
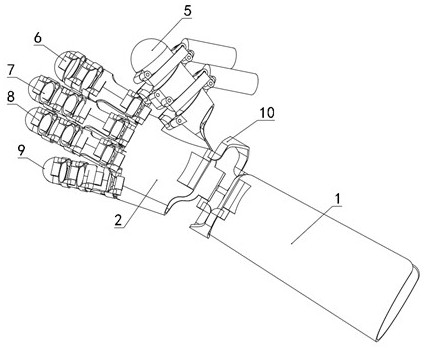
1、本申请提供了一种仿真机械手,包括小臂,小臂与手掌通过腕关节驱动装置连接,手掌通过手指驱动装置分别与母指、食指、中指、无名指、小指连接,所述小臂、手掌、母指、中指、食指、无名指、小指均为中空,可用于容纳人体的插入。
2、作为一种优选方案,所述腕关节驱动装置包括连接小臂和手掌的腕关节c型连接杆,其中,腕关节c型连接杆包括腕关节c型连接杆一和腕关节c型连接杆二,小臂的上方固定有腕关节驱动缸,腕关节驱动缸的输出端与手掌连接。
3、作为一种优选方案,所述小臂的上部和下部分别设置有小臂上安装部和小臂下安装部,所述小臂上安装部包括小臂上本体,小臂上本体上设置有贯通的小臂上安装孔一,小臂上安装孔一的上部设置有贯通的小臂上安装孔二,小臂上本体的中部开设有驱动缸安装槽,驱动缸安装槽与小臂上安装孔二连通;所述小臂下安装部包括小臂下本体,小臂下本体上设置有贯通的小臂下安装孔。
4、作为一种优选方案,所述手掌靠近小臂的一侧的上部和下部分别设置有手掌上安装部和手掌下安装部,手掌上安装部包括手掌上本体,小手掌上本体上设置有贯通的手掌上安装孔一,手掌上安装孔一的上部设置有贯通的手掌上安装孔二,手掌上本体的中部开设有驱动缸连接槽,驱动缸连接槽与手掌上安装孔二连通;所述手掌下安装部包括手掌下本体,手掌下本体上设置有贯通的手掌下安装孔;所述手掌远离小臂的一侧上部分别设置有母指上安装部、食指上安装部、中指上安装部、无名指上安装部、小指上安装部;手掌远离小臂的一侧下部分别设置有母指下安装部、食指下安装部、中指下安装部、无名指下安装部、小指下安装部;所述小臂上安装孔一和手掌下安装孔之间安装有腕关节c型连接杆一,手掌上安装孔一和小臂下安装孔之间安装有腕关节c型连接杆二;驱动缸安装槽内安装有腕关节驱动缸,腕关节驱动缸的输出端与驱动缸连接槽连接。
5、作为一种优选方案,所述腕关节c型连接杆包括c型本体,c型本体顶部的右侧设置有腕关节上安装部,腕关节上安装部上开设有腕关节上安装孔,c型本体底部的左侧设置有腕关节下安装部,腕关节下安装部上开设有腕关节下安装孔;或c型本体顶部的左侧设置有腕关节上安装部,腕关节上安装部上开设有腕关节上安装孔,c型本体底部的右侧设置有腕关节下安装部,腕关节下安装部上开设有腕关节下安装孔。
6、作为一种优选方案,所述手指驱动装置包括连接手掌和母指、食指、中指、无名指、小指的手指c型连接杆,手掌的上方固定有手指驱动缸,手指驱动缸的输出端与母指、中指、食指、无名指、小指连接。
7、作为一种优选方案,所述手指c型连接杆包括母指c型连接杆、食指c型连接杆、中指c型连接杆、无名指c型连接杆、小指c型连接杆。
8、作为一种优选方案,所述手指c型连接杆包括连接本部,连接本部的顶部的右侧设置上安装部,上安装部上设置有上安装孔,连接本部的底部左侧设置有下安装部,下安装部上设置有下安装孔;或连接本部的顶部的左侧设置上安装部,上安装部上设置有上安装孔,连接本部的底部右侧设置有下安装部,下安装部上设置有下安装孔。
9、本申请的小臂、手掌、母指、中指、食指、无名指、小指设置为中空,可用于容纳人体的插入,且小臂与手掌之间设置有腕关节驱动装置、手掌与各个手指之间设置有手指驱动装置,在有人体插入或无人体插入时均可实现动作,保证了仿真性的同时,提高了本申请的通用性;本申请腕关节c型连接杆、手指c型连接杆的设置,能够实现腕关节、指关节的旋转,且在实现连杆支撑功能的前提下,c形结构能让人体手臂、手掌、手指等部分穿入机械手内部,而互不干涉。
技术特征:1.一种仿真机械手,包括小臂(1),其特征在于,小臂(1)与手掌(2)通过腕关节驱动装置(3)连接,手掌(2)通过手指驱动装置(4)分别与母指(5)、食指(6)、中指(7)、无名指(8)、小指(9)连接,所述小臂(1)、手掌(2)、母指(5)、食指(6)、中指(7)、无名指(8)、小指(9)均为中空,可用于容纳人体的插入;所述腕关节驱动装置(3)包括连接小臂(1)和手掌(2)的腕关节c型连接杆(10),其中,腕关节c型连接杆(10)包括腕关节c型连接杆一(11)和腕关节c型连接杆二(12),小臂(1)的上方固定有腕关节驱动缸(13),腕关节驱动缸(13)的输出端与手掌(2)连接;所述小臂(1)的上部和下部分别设置有小臂上安装部和小臂下安装部,所述小臂上安装部包括小臂上本体(26),小臂上本体(26)上设置有贯通的小臂上安装孔一(27),小臂上安装孔一(27)的上部设置有贯通的小臂上安装孔二(28),小臂上本体(26)的顶部中部开设有驱动缸安装槽(29),驱动缸安装槽(29)与小臂上安装孔二(28)连通;所述小臂下安装部包括小臂下本体(30),小臂下本体(30)上设置有贯通的小臂下安装孔(31)。
2.根据权利要求1所述的一种仿真机械手,其特征在于,所述手掌(2)靠近小臂(1)的一侧的上部和下部分别设置有手掌上安装部和手掌下安装部,手掌上安装部包括手掌上本体(32),手掌上本体(32)上设置有贯通的手掌上安装孔一(33),手掌上安装孔一(33)的上部设置有贯通的手掌上安装孔二(34),手掌上本体(32)顶部的中部开设有驱动缸连接槽(35),驱动缸连接槽(35)与手掌上安装孔二(34)连通;所述手掌下安装部包括手掌下本体(36),手掌下本体(36)上设置有贯通的手掌下安装孔(37);所述手掌(2)远离小臂(1)的一侧上部分别设置有母指上安装部、食指上安装部、中指上安装部、无名指上安装部、小指上安装部;手掌(2)远离小臂(1)的一侧下部分别设置有母指下安装部、食指下安装部、中指下安装部、无名指下安装部、小指下安装部;所述小臂上安装孔一(27)和手掌下安装孔(37)之间安装有腕关节c型连接杆一(11),手掌上安装孔一(33)和小臂下安装孔(31)之间安装有腕关节c型连接杆二(12);驱动缸安装槽(29)内安装有腕关节驱动缸(13),腕关节驱动缸(13)的输出端与驱动缸连接槽(35)连接。
3.根据权利要求1所述的一种仿真机械手,其特征在于,所述腕关节c型连接杆(10)包括c型本体(14),c型本体(14)顶部的右侧设置有腕关节上安装部(15),腕关节上安装部(15)上开设有腕关节上安装孔(16),c型本体(14)底部的左侧设置有腕关节下安装部(17),腕关节下安装部(17)上开设有腕关节下安装孔(18);或c型本体(14)顶部的左侧设置有腕关节上安装部(15),腕关节上安装部(15)上开设有腕关节上安装孔(16),c型本体(14)底部的右侧设置有腕关节下安装部(17),腕关节下安装部(17)上开设有腕关节下安装孔(18)。
4.根据权利要求1所述的一种仿真机械手,其特征在于,所述手指驱动装置(4)包括连接手掌(2)和母指(5)、食指(6)、中指(7)、无名指(8)、小指(9)的手指c型连接杆(19),手掌(2)的上方固定有手指驱动缸(20),手指驱动缸(20)的输出端与母指(5)、食指(6)、中指(7)、无名指(8)、小指(9)连接。
5.根据权利要求4所述的一种仿真机械手,其特征在于,所述手指c型连接杆(19)包括母指c型连接杆、食指c型连接杆、中指c型连接杆、无名指c型连接杆、小指c型连接杆。
6.根据权利要求4所述的一种仿真机械手,其特征在于,所述手指c型连接杆(19)包括连接本部(21),连接本部(21)的顶部的右侧设置上安装部(22),上安装部(22)上设置有上安装孔(23),连接本部(21)的底部左侧设置有下安装部(24),下安装部(24)上设置有下安装孔(25);或连接本部(21)的顶部的左侧设置上安装部(22),上安装部(22)上设置有上安装孔(23),连接本部(21)的底部右侧设置有下安装部(24),下安装部(24)上设置有下安装孔(25)。
7.根据权利要求2所述的一种仿真机械手,其特征在于,所述母指(5)包括母指一节(68)和母指二节(69),母指一节(68)分别与手掌(2)和母指二节(69)连接;母指一节(68)的下部与手掌(2)的母指上安装部之间安装有母指c型连接杆一(87),母指一节(68)的上部与母指下安装部之间安装有母指c型连接杆二(88),母指一节(68)的上部与母指二节(69)的下部之间设置有母指c型连接杆三(90),母指二节(69)的上部与母指一节(68)的下部之间设置有母指c型连接杆四(91);手掌(2)与母指一节(68)之间安装有母指驱动缸一(89),母指一节(68)与母指二节(69)之间安装有母指驱动缸二(92)。
8.根据权利要求2所述的一种仿真机械手,其特征在于,所述食指(6)包括依次连接的食指一节(93)、食指二节(94)、食指三节(95),所述食指一节(93)的上部设置有食指一节上安装部一和食指一节上安装部二,食指一节的下部设置有食指一节下安装部一和食指一节下安装部二;所述食指二节(94)的上部设置有食指二节上安装部一和食指二节上安装部二,食指二节的下部设置有食指二节下安装部;所述食指三节(95)的上部和下部分别安装有食指三节上安装部和食指三节下安装部;食指上安装部和食指一节下安装部一之间安装有食指c型连接杆一(120),食指一节上安装部一和食指下安装部之间安装有食指c型连接杆二(121),食指一节上安装部二和食指二节下安装部之间安装有食指c型连接杆三(123),食指二节上安装部一和食指一节下安装部二之间安装有食指c型连接杆四(124),食指二节上安装部二和食指三节下安装部之间安装有食指c型连接杆五(126),食指三节上安装部和食指二节下安装部之间安装有食指c型连接杆六(127);食指上安装部与食指一节上安装部一之间设置有食指驱动缸一(122),食指一节上安装部二和食指二节上安装部一之间安装有食指驱动缸二(125);
技术总结本申请提供了一种仿真机械手,包括小臂,小臂与手掌通过腕关节驱动装置连接,手掌通过手指驱动装置分别与母指、食指、中指、无名指、小指连接,所述小臂、手掌、母指、中指、食指、无名指、小指均为中空,可用于容纳人体的插入;本申请的小臂、手掌、母指、中指、食指、无名指、小指设置为中空,可用于容纳人体的插入,且小臂与手掌之间设置有腕关节驱动装置、手掌与各个手指之间设置有手指驱动装置,在有人体插入或无人体插入时均可实现动作,保证了仿真性的同时,提高了本申请的通用性。技术研发人员:古今颖,杨春军,高佳,钟晓峰受保护的技术使用者:天津上升科技有限公司技术研发日:技术公布日:2024/6/13本文地址:https://www.jishuxx.com/zhuanli/20240617/52662.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表