一种稳定道床的控制系统、控制方法、轨道养护车及介质与流程
- 国知局
- 2024-07-08 11:18:18
本发明涉及轨道养护用设备,特别是涉及一种稳定道床的控制系统、控制方法、轨道养护车及介质。
背景技术:
1、有砟铁道线路经过清筛和捣固作业后,道床不够密实,道床横向阻力及支承刚度较差,迫使列车限速运行,损失铁路运。因此,需要对砟铁路道床进行养护。其中,稳定作业是有砟铁路道床养护的有效工作之一。道床横向阻力及支承刚度作为稳定作业后道床稳定性最重要的评价指标。
2、在相关的道床横向阻力、支承刚度的测量中,将油泵千金顶、电脑、数据采集器等构成的检测设备固定在道床上进行人工离线检测。在进行人工离线检测前,需要拆除轨枕与钢轨之间的扣件,去除钢轨后,才能安装测试设备进行测试,且人工离线检测的测试效率低,不能被广泛应用在工程实际应用中。
3、由此可见,提供一种新的控制系统,以提高对道床横向阻力、支承刚度的测量效率是本领域人员亟需解决的技术问题。
技术实现思路
1、本发明的目的是提供一种稳定道床的控制系统、控制方法、轨道养护车及介质,以解决现有的检测设备不能在线测量以及测量效率低的技术问题。
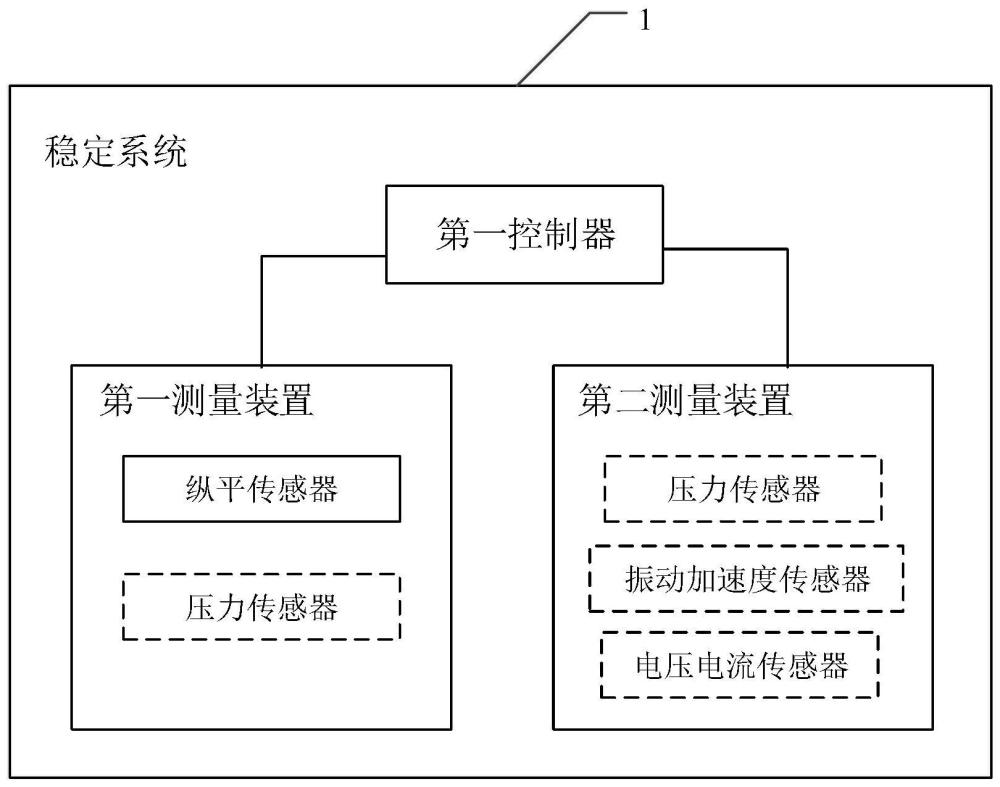
2、为解决上述技术问题,本发明提供一种稳定道床的控制系统,包括:位于稳定系统中的第一测量装置、第二测量装置、第一控制器;所述稳定系统作用于钢轨上;
3、所述第一测量装置包括纵平传感器、压力传感器,所述纵平传感器位于所述稳定系统中,用于测量轨道道床在稳定作业后的下沉量,所述压力传感器位于稳定装置中的两侧的油缸处,用于测量轨道下压力;所述稳定装置位于所述稳定系统中;
4、所述第二测量装置包括所述压力传感器、振动加速度传感器、电压电流传感器;所述振动加速度传感器位于所述稳定装置中,用于测量所述稳定装置的横向振动加速度;所述电压电流传感器位于所述稳定装置中;
5、所述第一控制器分别与所述第一测量装置、所述第二测量装置连接,用于根据所述第一测量装置测得的所述下沉量和所述下压力确定道床支承刚度值;以及根据所述第二测量装置测得的所述下压力、所述振动加速度和依据所述电压电流传感器测得的电压值、电流值换算的电机振动输出功率确定道床横向阻力值;根据所述道床支承刚度值和所述道床横向阻力值对道床稳定性进行检测。
6、优选地,所述第一测量装置中还包括作业走行速度传感器,所述第二测量装置中还包括所述作业走行速度传感器;
7、所述作业走行速度传感器用于测量作业走行速度;
8、所述第一控制器用于根据所述作业走行速度计算移动距离确定所述稳定装置移动过程中测量范围;根据所述第一测量装置测得的所述稳定装置移动过程中测量范围内的所述下沉量和所述下压力确定所述道床支承刚度值;以及根据所述作业走行速度计算移动距离确定所述稳定装置移动过程中横向阻力测量范围;根据所述第二测量装置测得的所述横向阻力测量范围内的所述下压力、所述振动加速度、所述电机振动输出功率确定所述道床横向阻力值。
9、优选地,确定所述道床支承刚度值包括:
10、获取所述下压力的值与所述下压力的修正系数的第一乘积;
11、获取所述第一乘积与预设道床横向阻力值的第一差值;
12、获取所述第一差值与所述下沉量的第一比值;
13、根据所述第一比值确定所述道床支承刚度值。
14、优选地,所述道床支承刚度值的计算公式为:
15、
16、其中,ssd表示道床支承刚度值,g表示所述稳定装置的重力,fi表示所述下压力,l1表示稳定后下沉量,ks表示轨道下压力修正系数;
17、ks的计算公式为:
18、
19、其中,l100表示100kn标定下沉量,ssd(100kn)表示100kn标定支承刚度。
20、优选地,确定所述道床横向阻力值包括:
21、获取所述下压力与第一功率的第二乘积、所述下压力与第二功率的第三乘积;其中,所述第一功率为预设下压力下标定的轨排与道砟振动功率;所述第二功率为运转空载功率;
22、获取所述稳定装置中所述电机振动输出功率与所述第二乘积、所述第三乘积的第二差值;其中,所述轨排与道砟振动功率、运转空载功率、传递到轨枕摩擦功率的功率之和与所述电机振动输出功率满足能量守恒定律;
23、获取所述第二差值与横向位移振幅的第二比值;
24、根据所述第二比值确定所述道床横向阻力值。
25、优选地,所述道床横向阻力值的计算公式为:
26、
27、其中,rld表示所述道床横向阻力值,p表示电机振动输出功率,p1表示所述轨排与道砟振动功率,p2表示所述空载运转功率,μ表示道床与轨枕摩擦系数,a表示横向振动位移,f表示振动频率,p1(100kn)表示100kn标定振动功率,p2(35hz)表示35hz标定空载运转功率,k1表示轨排与道砟振动功率修正系数,k2表示空载运转功率修正系数;
28、k1的计算公式为:
29、
30、k2的计算公式为:
31、
32、其中,fi表示所述下压力。
33、优选地,所述第一控制器用于根据所述道床支承刚度值和所述道床横向阻力值对道床稳定性进行检测包括:
34、所述第一控制器用于根据预设范围内道床横向阻力平均值、所述预设范围内道床支承刚度平均值以及结合所述下压力、所述预设范围、权重系数确定所述预设范围内道床密实度评价值。
35、优选地,所述预设范围内道床密实度评价值的计算公式为:
36、tbc(s)=rld(s)*b1+ssd(s)*b2+a*b3+fi*b4;
37、其中,tbc(s)表示所述预设范围内道床密实度评价值,a表示横向振动位移,rld(s)表示所述预设范围内道床横向阻力平均值,ssd(s)表示所述预设范围内道床支承刚度平均值,b1、b2、b3、b4均表示权重系数。
38、优选地,所述第一控制器还用于从多个所述预设范围内道床密实度评价值中确定目标道床密实度评价值;获取所述目标道床密实度评价值对应的目标稳定作业参数,其中,所述目标稳定作业参数中至少包括:目标激振力、目标振幅、目标下沉量、目标下压力。
39、优选地,还包括第二控制器,所述第二控制器用于获取所述目标稳定作业参数,根据所述目标稳定作业参数实现轨道几何参数保持控制,其中,所述轨道几何参数中包括轨道横平参数和轨道纵平参数。
40、优选地,所述输出激振力为所述轨道纵平参数,所述第二控制器用于获取所述目标稳定作业参数,根据所述目标稳定作业参数控制所述轨道几何参数中的所述轨道纵平参数包括:
41、所述第二控制器分别与所述振动加速度传感器、所述纵平传感器连接,用于根据所述目标振幅、实际振幅、目标下沉量和所述纵平传感器测量的实际下沉量修正基础激振力,以得到输出激振力;其中,所述实际振幅是由所述振动加速度传感器测量的实际振动加速度确定出的。
42、优选地,所述输出激振力的计算公式为:
43、f=f&±c1*le±c2*ae;
44、其中,f表示所述输出激振力,f&表示所述基础激振力,ae表示所述预设振幅与所述实际振幅之间的差值,le表示所述预设下沉量与所述实际下沉量之间的差值,c1表示关联下沉量激振力修正系数,c2表示关联振幅激振力修正系数。
45、优选地,理论横平值为所述目标下压力的值;所述稳定装置中设置有第一横平检测传感器、第二横平检测传感器,所述第二控制器分别与所述第一横平检测传感器、所述第二横平检测传感器、所述作业走行速度传感器、所述压力传感器连接;所述第二控制器用于根据所述目标稳定作业参数控制所述轨道几何参数中的所述轨道横平参数包括:
46、所述第二控制器用于根据所述走行速度传感器确定测量距离,获取所述测量距离内所述第一横平检测传感器测得的稳定作业前第一实际平均横平值以及获取所述测量距离内所述第二横平检测传感器测得的稳定作业后第二实际平均横平值;将所述第一实际平均横平值、所述第二实际平均横平值分别与所述理论横平值进行比较以获取误差值;
47、判断所述误差值是否大于预设值;
48、若否,则保持第一侧油缸的下压力与第二侧油缸的下压力;在检测到下压力修正范围在预设修正范围的情况下,调节油缸下压比例阀;
49、若是,则在检测到所述第一侧油缸的下压力大于所述第二侧油缸的下压力的情况下,增加所述第一侧油缸的下压力,保持所述第二侧油缸的下压力;进入所述在检测到下压力修正范围在预设修正范围的情况下,调节油缸下压比例阀的步骤;
50、在检测到所述第二侧油缸的下压力小于所述第二侧油缸的下压力的情况下,增加所述第二侧油缸的下压力,保持所述第一侧油缸的下压力;进入所述在检测到下压力修正范围在预设修正范围的情况下,调节油缸下压比例阀的步骤。
51、为了解决上述技术问题,本发明还提供一种稳定道床的控制方法,应用于包括位于稳定系统中的第一测量装置、第二测量装置、第一控制器的稳定道床的控制系统,所述稳定系统作用于钢轨上;所述第一测量装置包括纵平传感器、压力传感器,所述纵平传感器位于所述稳定系统中,用于测量轨道道床在稳定作业后的下沉量,所述压力传感器位于稳定装置中的两侧的油缸处,用于测量轨道下压力;所述稳定装置位于所述稳定系统中;所述第二测量装置包括所述压力传感器、振动加速度传感器、电压电流传感器;所述振动加速度传感器位于所述稳定装置中,用于测量所述稳定装置的横向振动加速度;所述电压电流传感器位于所述稳定装置中;所述第一控制器分别与所述第一测量装置、所述第二测量装置连接;所述方法包括:
52、根据所述第一测量装置测得的所述下沉量和所述下压力确定道床支承刚度值;
53、根据所述第二测量装置测得的所述下压力、所述振动加速度、和依据所述电压电流传感器测得的电压值、电流值换算的电机振动输出功率确定道床横向阻力值;
54、根据所述道床支承刚度值和所述道床横向阻力值对道床稳定性进行检测。
55、为了解决上述技术问题,本发明还提供一种轨道养护车,包括:
56、存储器,用于存储计算机程序;
57、处理器,用于执行所述计算机程序时实现上述的稳定道床的控制方法的步骤。
58、为了解决上述技术问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的稳定道床的控制方法的步骤。
59、本发明所提供的稳定道床的控制系统,包括:位于稳定系统中的第一测量装置、第二测量装置、第一控制器;稳定系统作用于钢轨上;第一测量装置包括纵平传感器、压力传感器,纵平传感器位于稳定系统中,用于测量轨道道床在稳定作业后的下沉量,压力传感器位于稳定装置中的两侧的油缸处,用于测量轨道下压力;稳定装置位于稳定系统中;第二测量装置包括压力传感器、振动加速度传感器、电压电流传感器;振动加速度传感器位于稳定装置中,用于测量稳定装置的横向振动加速度;电压电流传感器位于稳定装置中;第一控制器分别与第一测量装置、第二测量装置连接。该控制系统中的第一控制器根据第一测量装置测得的下沉量和下压力确定道床支承刚度值;以及根据第二测量装置测得的下压力、振动加速度、和依据电压电流传感器测得的电压值、电流值换算的电机振动输出功率确定道床横向阻力值;从而实现根据道床支承刚度值和道床横向阻力值对道床稳定性的检测。由于第一测量装置、第二测量装置、第一控制器均位于稳定系统中,因此,实现了控制系统中元件的集成性;且稳定系统位于钢轨上方,即在检测的时候是不需要拆除轨枕扣件,可以直接进行在线检测,提高了测试效率及便捷性。
60、此外,本发明还提供一种稳定道床的控制方法、轨道养护车以及计算机可读存储介质,与上述提到的稳定道床的控制系统具有相同或相对应的技术特征,效果同上。
本文地址:https://www.jishuxx.com/zhuanli/20240617/53000.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表