一种多功能洒扫机器人的制作方法
- 国知局
- 2024-07-09 16:39:37
本发明涉及建筑机器人领域,具体而言,涉及一种多功能洒扫机器人。
背景技术:
1、建筑行业机器人在应用场景上尚有很多空白有待填补,尤其是在工地清扫、洒水、巡检等方面,仍处于智能化的空白阶段,亟需有相应的产品面世来提升建筑业的智能建造进程。
2、清扫、洒水、巡检的现有主要问题:
3、(1)作业环境:工地的清扫仍以人工为主,劳作工人需要在烈日下面对高粉尘的环境来进行作业,环境很差,对身体健康威胁大。
4、(2)劳动强度大:建筑工地在主体建设阶段,室外道路、室内、地下室针对粉尘的清扫频率高、作业面积大,因此劳动强度很大。
5、(3)效果不理想:清扫以人工配备简易工具的方式作业,洒水以驾驶洒水车的方式作业,巡检以工地安检人员巡视的方式,均是以人实施、以主观为判断标准、不定时进行,组织难度大、效果不理想,难以保持较好的效果。
6、(4)经济效益低:清扫、洒水、巡检需要购入设备、安排专人进行,在建筑行业面临严峻的用人压力的情况下,费用支出越来越高。
7、因此,亟需一款针对建筑工地在室外、室内、地下室作业的,集清扫、洒水、巡检为一体的机器人,来解决人工作业环境差、劳动强度大、效果不理想、经济效益低的问题。
技术实现思路
1、本发明的目的包括,例如,提供一种多功能洒扫机器人,其集清扫、洒水、巡检为一体,可为工地节省清扫人员数量、省去洒水设备、巡检实现24小时实时巡视、自动上报异常、具备可追溯性等优点,为智慧工地填补空白应用,实现更加智能化的管理和作业,促进产业升级。
2、本发明的实施例可以这样实现:
3、本发明实施例提供一种多功能洒扫机器人,一种多功能洒扫机器人,包括:
4、机器人主体;
5、控制模块,所述控制模块安装于洒水机器人主体上;
6、垃圾清扫模块,所述垃圾清扫模块安装于所述机器人主体上并与所述控制模块电连接,用于清扫并收集垃圾;
7、洒水模块,所述洒水模块安装于所述机器人主体上并与所述控制模块电连接,用于洒水;
8、工地巡检模块,所述工地巡检模块安装所述机器人主体上并与所述控制模块电连接,用于巡检;
9、行走模块,所述行走模块安装所述机器人主体上并与所述控制模块电连接,用于行走。
10、进一步地,在可选的实施例中,所述垃圾清扫模块包括边刷机构、主刷机构、负压装置和垃圾箱机构,所述边刷机构和所述主刷机构相邻并均安装于所述机器人主体的底部,所述边刷机构用于将垃圾向所述主刷机构聚拢,所述负压装置用于与所述主刷机构配合,以将所述垃圾抽吸至所述垃圾箱机构。
11、进一步地,在可选的实施例中,所述主刷机构包括第一主刷、第二主刷和第三主刷,所述第一主刷、所述第二主刷和所述第三主刷依次布置,且所述第一主刷靠近洒水边刷机构,所述第三主刷靠近所述垃圾箱机构。
12、进一步地,在可选的实施例中,所述垃圾清扫模块还包括升降机构,所述升降机构分别与所述边刷机构和所述第一主刷传动连接,用于分别使所述边刷机构和所述第一主刷下降或上升,以使所述边刷机构和所述第一主刷相对所述机器人主体的底部伸出或收缩。
13、进一步地,在可选的实施例中,所述洒水模块包括水箱、隔膜泵、洒水电磁阀和喷嘴,所述水箱、所述隔膜泵和所述喷嘴通过管路连接,所述洒水电磁阀安装于所述管路上并与所述控制模块电连接,用于控制所述管路打开或关闭,所述控制模块与所述隔膜泵电连接并用于控制所述隔膜泵的工作状态,所述喷头可调节地安装于所述机器人主体上。
14、进一步地,在可选的实施例中,所述洒水模块还包括温度检测传感器和排水电磁阀,所述温度传感器和所述排水电磁阀均与所述控制模块电连接,所述温度检测传感器用于检测实际气温,所述控制模块还用于在所述实际气温低于预设温度时控制所述排水电磁阀和所述隔膜泵,以排出所述水箱和所述管路内的水。
15、进一步地,在可选的实施例中,所述洒水模块还包括液位计,所述液位计用于监测所述水箱的实时水位,所述控制模块与所述液位计电连接,用于在所述实时水位低于预设水位时,控制所述行走模块,以使所述多功能洒扫机器人行走至预设加水点。
16、进一步地,在可选的实施例中,所述水箱还设有电动盖,在所述多功能洒扫机器人行走至预设加水点时,所述电动盖打开,以向所述水箱内加水。
17、进一步地,在可选的实施例中,所述行走模块包括底盘轮系、3d激光雷达单元和gps导航单元,所述底盘轮系、所述3d激光雷达单元和所述gps导航单元均与所述控制模块电连接,所述3d激光雷达单元用于识别工作场地和障碍物,所述gps导航单元用于对所述多功能洒扫机器人进行定位,所述底盘轮系用于根据所述控制模块的控制指令使所述多功能洒扫机器人行走。
18、进一步地,在可选的实施例中,所述工地巡检模块包括巡检摄像机,所述巡检摄像机可活动地安装在所述机器人主体上并与所述控制模块电连接,所述巡检摄像机用于巡检工作现场;所述巡检摄像机还用于与工地主控室通信连接,用于上传实时画面和报警。
19、本发明提供的多功能洒扫机器人具有以下有益效果:该多功能洒扫机器人集清扫、洒水、巡检为一体,其中:垃圾清扫模块能够实现清扫和垃圾收集功能,洒水模块能够实现洒水功能,工地巡检模块能够实现对工地的巡检,行走模块能够实现多功能洒扫机器人的定位和行走功能。本发明实施例通过控制模块实现对垃圾清扫模块、洒水模块、工地巡检模块和行走模块进行控制,可以应用于建筑工地室外的临时道路、主体建设期的室内和地下室,进行垃圾清扫、路面洒水、安全巡检等作业,实现清扫建筑垃圾及其它装修垃圾;根据工地洒水作业频次按照设定路线自动加水、自动巡航洒水;不间断式的进行安全巡检,实时回传视频流并可以通过后台系统进行ai识别,上报异常通知及相关图片或视频段。
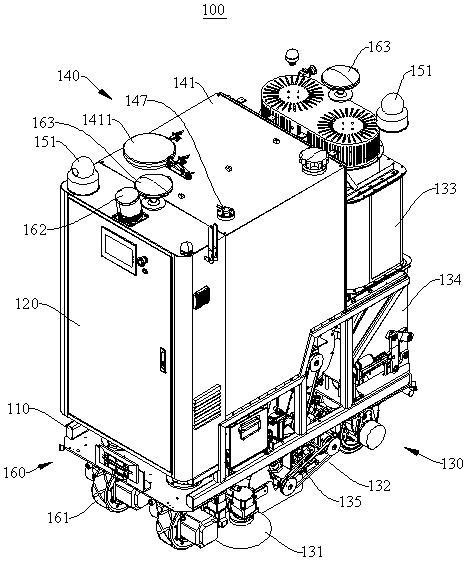
技术特征:1.一种多功能洒扫机器人(100),其特征在于,包括:
2.根据权利要求1所述的多功能洒扫机器人(100),其特征在于,所述垃圾清扫模块(130)包括边刷机构(131)、主刷机构(132)、负压装置(133)和垃圾箱机构(134),所述边刷机构(131)和所述主刷机构(132)相邻并均安装于所述机器人主体(110)的底部,所述边刷机构(131)用于将垃圾向所述主刷机构(132)聚拢,所述负压装置(133)用于与所述主刷机构(132)配合,以将所述垃圾抽吸至所述垃圾箱机构(134)。
3.根据权利要求2所述的多功能洒扫机器人(100),其特征在于,所述主刷机构(132)包括第一主刷(1321)、第二主刷(1322)和第三主刷(1323),所述第一主刷(1321)、所述第二主刷(1322)和所述第三主刷(1323)依次布置,且所述第一主刷(1321)靠近洒水边刷机构(131),所述第三主刷(1323)靠近所述垃圾箱机构(134)。
4.根据权利要求3所述的多功能洒扫机器人(100),其特征在于,所述垃圾清扫模块(130)还包括升降机构(135),所述升降机构(135)分别与所述边刷机构(131)和所述第一主刷(1321)传动连接,用于分别使所述边刷机构(131)和所述第一主刷(1321)下降或上升,以使所述边刷机构(131)和所述第一主刷(1321)相对所述机器人主体(110)的底部伸出或收缩。
5.根据权利要求1所述的多功能洒扫机器人(100),其特征在于,所述洒水模块(140)包括水箱(141)、隔膜泵(142)、洒水电磁阀(143)和喷嘴(144),所述水箱(141)、所述隔膜泵(142)和所述喷嘴(144)通过管路连接,所述洒水电磁阀(143)安装于所述管路上并与所述控制模块(120)电连接,用于控制所述管路打开或关闭,所述控制模块(120)与所述隔膜泵(142)电连接并用于控制所述隔膜泵(142)的工作状态,所述喷头可调节地安装于所述机器人主体(110)上。
6.根据权利要求5所述的多功能洒扫机器人(100),其特征在于,所述洒水模块(140)还包括温度检测传感器(145)和排水电磁阀(146),所述温度传感器和所述排水电磁阀(146)均与所述控制模块(120)电连接,所述温度检测传感器(145)用于检测实际气温,所述控制模块(120)还用于在所述实际气温低于预设温度时控制所述排水电磁阀(146)和所述隔膜泵(142),以排出所述水箱(141)和所述管路内的水。
7.根据权利要求5或6所述的多功能洒扫机器人(100),其特征在于,所述洒水模块(140)还包括液位计(147),所述液位计(147)用于监测所述水箱(141)的实时水位,所述控制模块(120)与所述液位计(147)电连接,用于在所述实时水位低于预设水位时,控制所述行走模块(160),以使所述多功能洒扫机器人(100)行走至预设加水点。
8.根据权利要求7所述的多功能洒扫机器人(100),其特征在于,所述水箱(141)还设有电动盖(1411),在所述多功能洒扫机器人(100)行走至预设加水点时,所述电动盖(1411)打开,以向所述水箱(141)内加水。
9.根据权利要求1所述的多功能洒扫机器人(100),其特征在于,所述行走模块(160)包括底盘轮系(161)、3d激光雷达单元(162)和gps导航单元(163),所述底盘轮系(161)、所述3d激光雷达单元(162)和所述gps导航单元(163)均与所述控制模块(120)电连接,所述3d激光雷达单元(162)用于识别工作场地和障碍物,所述gps导航单元(163)用于对所述多功能洒扫机器人(100)进行定位,所述底盘轮系(161)用于根据所述控制模块(120)的控制指令使所述多功能洒扫机器人(100)行走。
10.根据权利要求1所述的多功能洒扫机器人(100),其特征在于,所述工地巡检模块(150)包括巡检摄像机(151),所述巡检摄像机(151)可活动地安装在所述机器人主体(110)上并与所述控制模块(120)电连接,所述巡检摄像机(151)用于巡检工作现场;所述巡检摄像机(151)还用于与工地主控室通信连接,用于上传实时画面和报警。
技术总结本发明提供的多功能洒扫机器人,涉及建筑机器人领域。该多功能洒扫机器人包括机器人主体;控制模块,控制模块安装于洒水机器人主体上;垃圾清扫模块,垃圾清扫模块安装于机器人主体上并与控制模块电连接;洒水模块,洒水模块安装于机器人主体上并与控制模块电连接;工地巡检模块,工地巡检模块安装机器人主体上并与控制模块电连接;行走模块,行走模块安装机器人主体上并与控制模块电连接。本发明集清扫、洒水、巡检为一体,可为工地节省清扫人员数量、省去洒水设备、巡检实现24小时实时巡视、自动上报异常、具备可追溯性等优点,为智慧工地填补空白应用,实现更加智能化的管理和作业,促进产业升级。技术研发人员:赵栓,邹胜,史益军,李业林,闫震,赵明扣,章重武受保护的技术使用者:江苏中杰建兆智能装备有限公司技术研发日:技术公布日:2024/5/27本文地址:https://www.jishuxx.com/zhuanli/20240617/54186.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表