一种智能预制轨道板精调系统及精调方法与流程
- 国知局
- 2024-07-09 16:41:25
本发明属于轨道板智能调节,尤其涉及一种智能预制轨道板精调系统及精调方法。
背景技术:
1、预制轨道板具有铺设质量精度高、外形美观、铺设现场道床整洁且后期方便维修、符合国家装配化、标准化的发展方向等优点,被广泛应用于城市轨道交通站后工程建设领域。工人将预制轨道板运输到预定位置后,需进行轨道板精调工作,使轨道板的位姿满足设计的精度要求。现有技术1(cn114561840a)公开了一种地铁轨道板精调装置、系统及其使用方法,装置包括反射棱镜、上柱体、中柱体、下柱体、基座、激光对中器、反射棱镜、激光发生器、倾角传感器、控制器和电源等,可提高轨道板的精调速度,降低操作员劳动强度甚至能解放操作员,但是其只是能实现提高轨道板位姿测量速度,而调整轨道板仍需人工操作,整体施工效率低。现有技术2(cn116200977a)公开了一种基于末反馈检测的轨道板精调系统及操作方法,该精调系统包括精调爪、连接板、框架、动力轮、棱镜、传感器安装架、激光位移传感器等,虽然可减少人工操作,对轨道板的调节精度高,调整繁琐度大量减少,但是设备外形尺寸大,工作时所需空间大,仅适用大空间隧道,部分狭小隧道无法使用。现有技术3(cn116516752a)公开了一种城市轨道交通预制轨道板智能化精调系统及方法,包括三向精调器、多功能精调标架、plc液压控制系统,通过全站仪对准多功能精调标架上的定位棱镜,测量坐标数据并传递至plc液压控制系统,plc液压控制系统结合双向倾斜传感器测得的倾角数据,计算三向精调器调整量,据此控制三向精调器中各液压缸工作,该设备采用锥齿轮传动形式,隧道环境复杂,制造和装配锥齿轮困难,且容易磨损。针对上述问题,本发明设计了一种新型的智能预制轨道板精调系统及精调方法。
技术实现思路
1、针对现有技术中存在的不足,本发明提供了一种智能预制轨道板精调系统及精调方法,精调系统自动化程度高、位姿定位精度高、效率高,能够解决隧道内轨道板铺设效率低、工人劳动强度大、智能化程度不高等问题。
2、本发明通过以下技术手段实现上述技术目的。
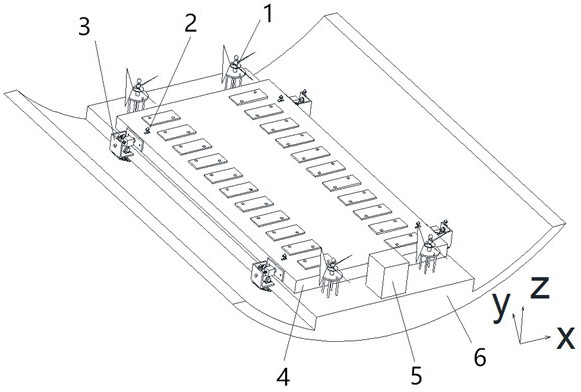
3、一种智能预制轨道板精调系统,包括测量硬件子模块、测量算法子模块、四个精调机构子模块、精调算法模块,测量算法子模块、精调算法模块均安装在服务器内,分别用于计算轨道板的位姿、精调机构子模块各电推缸的运动参数;测量硬件子模块包括四个光学发射器、八个接收器,其中,四个光学发射器布置在轨道板四周,记作第1~4号光学发射器,四个接收器分别安装在四个精调机构子模块上,记作第1~4号接收器,四个接收器安装在轨道板上,记作第5~8号接收器;四个精调机构子模块分别安装在轨道板两侧靠近拐角位置处,记作第1~4号精调机构子模块。
4、进一步地,所述光学发射器包括放置在隧道内的发射器基座,发射器基座上安装有电机,电机旋转轴中心线垂直于水平面,电机)旋转轴通过联轴器与主轴相连,主轴上安装有旋转盘;旋转盘上安装有三个一字线激光器,分别记作1~3号一字线激光器,三个一字线激光器的中心线相互之间夹角为120度,每个一字线激光器发出的光平面法向与水平面之间的夹角均为45度;主轴还安装有用于测量电机转动角速度的编码器,主轴顶部安装有全向光源;发射器基座上还安装有光电二级管及转换电路a,用于接收并处理对应光学发射器的一字线激光器光信号。
5、进一步地,所述接收器包括安装在接收器基座的光电二级管及转换电路b用于接收光学发射器和全向光源发出的光信号,转换成电信号并发送到测量算法子模块。
6、进一步地,所述精调机构子模块包括基座以及三个电推缸,基座包括球铰,球铰一端连接在底板上,另一端连接在反力架上,三个电推缸轴线零位时分别与世界坐标系x轴、y轴、z轴方向一致,三个电推缸的一端均通过销轴与反力架铰接,另一端均通过销轴与连接平台铰接,连接平台连接在轨道板上;基座上还安装有三轴倾角传感器,用于测量基座的倾角,四个精调机构子模块上的三轴倾角传感器分别与第1~4号接收器连接。
7、一种利用上述智能预制轨道板精调系统的智能预制轨道板精调方法,包括如下过程:
8、步骤1:光学发射器通电,电机旋转轴带动主轴旋转,进而带动主轴上的旋转盘旋转,一字线激光器发出平面激光,扫描隧道空间;
9、当第号光学发射器中的光电二级管及转换电路a接收到第号光学发射器中的1号一字线激光器发出的平面激光时,测量算法子模块控制第号光学发射器的全向光源发出全向脉冲光,各接收器的光电二级管及转换电路b接收该脉冲光,转换为电信号发送到测量算法子模块,并将此时第号接收器接收到第号光学发射器的激光的时间记为,,;
10、步骤2:随着旋转盘的旋转,第号光学发射器的2号、3号一字线激光器发出的平面激光依次扫描到第号接收器的光电二级管及转换电路b,光电二级管及转换电路b将激光信号转换为电信号发送到测量算法子模块,并将时间依次记为、,且;
11、步骤3:测量算法子模块计算各接收器的坐标;
12、步骤4:测量算法子模块将计算得到的八个接收器的坐标发送到精调算法模块,精调算法模块计算出精调机构子模块中各电推缸的位移量;
13、步骤5:精调算法模块根据计算得到的对应精调机构子模块中对应电推缸的控制变化量,控制该电推缸伸缩运动到目标位置;
14、步骤6:完成轨道板精调工作。
15、进一步地,所述步骤3的具体过程如下:
16、以第1号光学发射器的中心为原点,以第1号光学发射器指向第2号光学发射器的方向为x轴,以垂直地面向上为z轴,y轴符合右手定则,建立世界坐标系;设定第号光学发射器的中心在世界坐标系下的坐标为,第号接收器在世界坐标系下的坐标为,第号光学发射器的编码器测得电机角速度,则第号接收器在世界坐标系下的坐标由下列方程组求得:
17、
18、式中,
19、
20、
21、
22、式中,和为第号接收器在第号光学发射器坐标系下的方位角和俯仰角;、表示第号光学发射器的光平面旋转角度;表示第号接收器在世界坐标系下的坐标向量;表示最小二乘解系数矩阵;表示最小二乘解系数向量;、、、分别表示第1~4号光学发射器的中心在世界坐标系下的x轴坐标值;、、、分别表示第1~4号光学发射器的中心在世界坐标系下的y轴坐标值;、、、分别表示第1~4号光学发射器的中心在世界坐标系下的z轴坐标值;、、、分别表示第号接收器在第1~4号光学发射器坐标系下的俯仰角;、、、分别表示第号接收器在第1~4号光学发射器坐标系下的方位角;表示矩阵转置。
23、进一步地,所述步骤4的具体过程如下:
24、步骤4.1:计算第号精调机构子模块的第号电推缸与基座铰接点的坐标:
25、第号精调机构子模块上安装第号接收器,第1~4号接收器坐标为,,第号精调机构子模块的三轴倾角传感器测得其基座倾角为;则第号精调机构子模块的第号电推缸与基座铰接点的坐标由下列方程求得:
26、
27、
28、
29、
30、式中,、、分别为第号电推缸在零位时第号接收器与铰接点沿x轴、y轴、z轴方向的坐标差,,;、、分别表示绕x轴、y轴、z轴的旋转矩阵;
31、步骤4.2:计算第号精调机构子模块的第号电推缸与连接平台铰接点的坐标:
32、第5~8号接收器坐标为,,采用特征值最小二乘法拟合平面,其平面单位法向量为,平面方程为,轨道板上表面中心的坐标为,其值由下式求得:
33、式中,为接收器中的光电二级管及转换电路b距轨道板上表面的距离;
34、则第个精调机构子模块的第号电推缸与连接平台铰接点的坐标由下列方程求得:
35、
36、
37、
38、
39、
40、
41、
42、
43、式中,、、分别为第号精调机构子模块的第号电推缸在零位时轨道板上表面中心与铰接点沿x、y、z轴方向的坐标差,,;、、分别表示绕x轴、y轴、z轴的旋转矩阵;
44、步骤4.3:计算第号精调机构子模块的第号电推缸的伸出量:
45、
46、式中,为第号精调机构子模块的第号电推缸的初始长度,,;
47、步骤4.4:计算第号精调机构子模块的第号电推缸的目标伸出量:
48、根据轨道设计图,精调完成后轨道板四个角目标坐标为,,表示角标,无实际意义,采用特征值最小二乘法拟合平面,其平面单位法向量为,面方程为,精调完成后轨道板中心的坐标由下列方程求得:
49、
50、当轨道板完成精调时,第号精调机构子模块的第号电推缸与连接平台铰接点的坐标由下列方程求得,:
51、
52、
53、
54、
55、
56、式中,、、分别表示绕x轴、y轴、z轴的旋转矩阵;、、分别表示绕x轴、y轴、z的旋转角度;
57、则第号精调机构子模块的第号电推缸的目标伸出量为:
58、
59、步骤4.5:计算第号精调机构子模块的第号电推缸的控制变化量:
60、。
61、本发明具有如下有益效果:
62、针对隧道内轨道板铺设效率低、工人劳动强度大、智能化程度不高等问题,本发明的系统采用光学测量方案,测量精度高,采用分布式轨道板精调机构,单个子机构尺寸小,布置灵活,效率高,不仅适用大空间隧道,也可适用狭小空间隧道,适用范围广且制造装配相对较容易;采用智能化方法进行轨道板位姿测量和精调工作,精调过程无需人员参与,降低了工人劳动强度,提高了施工现场施工精度、效率和安全性,减少了人力投入和成本。
本文地址:https://www.jishuxx.com/zhuanli/20240617/54389.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表