一种语音控制的移动式固定装置及其功能性组件和相关方法与流程
- 国知局
- 2024-06-21 11:32:41
本发明涉及语音控制,特别涉及一种语音控制的移动式固定装置及其功能性组件和相关方法。
背景技术:
1、在日常生活的诸多方面,经常会用到需处理加工的板材类材料,这就要求对板材材料进行准确定位,以便于这些部件在加工过程中可以保持正确的并置关系,而绝大多数定位过程都利用固定装置实现的。例如在建筑及装修行业,需要对各类木质、金属类、玻璃板材进行裁剪、切割、拼装、焊接、平面打磨等操作,为了保证平面的稳定,需要事先对材料进行位置固定。在板材类产品生产加工过程中,通常也需要工作人员利用固定装置对其进行位置固定,防止加工时材料发生偏移。在对板材材料进行处理的过程中,如果不对其进行精准的位置定位,可能会影响其局部尺寸精度与工件加工质量,需要重新进行再次处理,消耗大量时间,造成人力资源的浪费。严重时还会直接造成材料的报废,甚至是重大生产安全事故的发生,对企业造成严重经济损失。可见,精准的固定装置在板材材料生产加工时是十分必要的辅助工具。
2、对较大板材类材料进行固定时,传统固定工具分为以下几种:
3、一、使用丝或自攻螺丝配合合页、铰链、插销等对材料打孔后安装固定,或使用二合一、三合一等连接件进行固定,这种方法使用打孔工具配合,还会对材料造成损伤,拆装费时费力,对高强度材料不友善,并且施工速度慢,板材拼装质量不易保证,在施工现场易被损伤,而且受震后易于自行松动;
4、二、使用粘剂黏连板材形成支撑结构进行固定,这种方法存在明显的弊端,如较弱粘合性粘剂难以起到固定作用,较强粘合性粘剂易存留污垢导致后期清理材料表面难度较大。对于钢制材料还有使用平角焊或者点焊的形式进行固定,如果固定位置存在偏差,重新切割对材料损耗大,且对焊接位置进行打磨,增加了处理时间,降低了工作效率;
5、三、使用夹具类固定装置如弹簧夹、玻璃夹等,这类固定装置灵活性高,但只能固定在材料边缘,对较长两个面板中间位置难固定,且只能固定高度相同的两个平面材料;
6、四、磁性固定装置进行固定,这种工具可以不损伤原材料,但对设备要求高,较厚板材或参差平面固定能力差;
7、五、使用机床类固定装置如压板机等进行固定,这类装置大都便携性较差,结构固定,不能够进行整体的通用适配,单个结构的使用增加了夹具管理和放置成本,另外还存在工装占地面积大、待加工板材尺寸受限等问题。
8、另外,还存在一些较为精准的固定装置,其使用程序高度集成,可实现自动化,但其存在适用范围局限,出现故障后排除困难,或变换应用场景需要反复调试,或需要多人协作进行等问题。以上诸多固定装置的不足,对新的固定装置提出了可方便携带拆解与安装、操作简单、高度可调性、可处理多组参差板材、可小空间内操作、可单人操作、可靠性高等需求。
9、近年来,随着语音控制技术在越来越多的领域中得到广泛应用,为板材固定装置带来更多创新思路,也逐渐出现了多种语音控制的固定装置,但其可调性大多较差,可执行的指令有限,识别的语音语义定义固定,灵活性较差,无法对固定装置实现多角度调节的复杂操作,并且装置在噪声较大的工作环境中语音识别率低,不能实时操控,交互的适宜性较低,尚不能满足对固定装置的多场景多用途要求。
技术实现思路
1、本发明提供了一种语音控制的移动式固定装置及其功能性组件和相关方法,实现多场景、复杂噪声环境下的板材固定需求的多工件固定、多平面连接、多倾角调节、多活动组件结合、指令灵活自由度高。
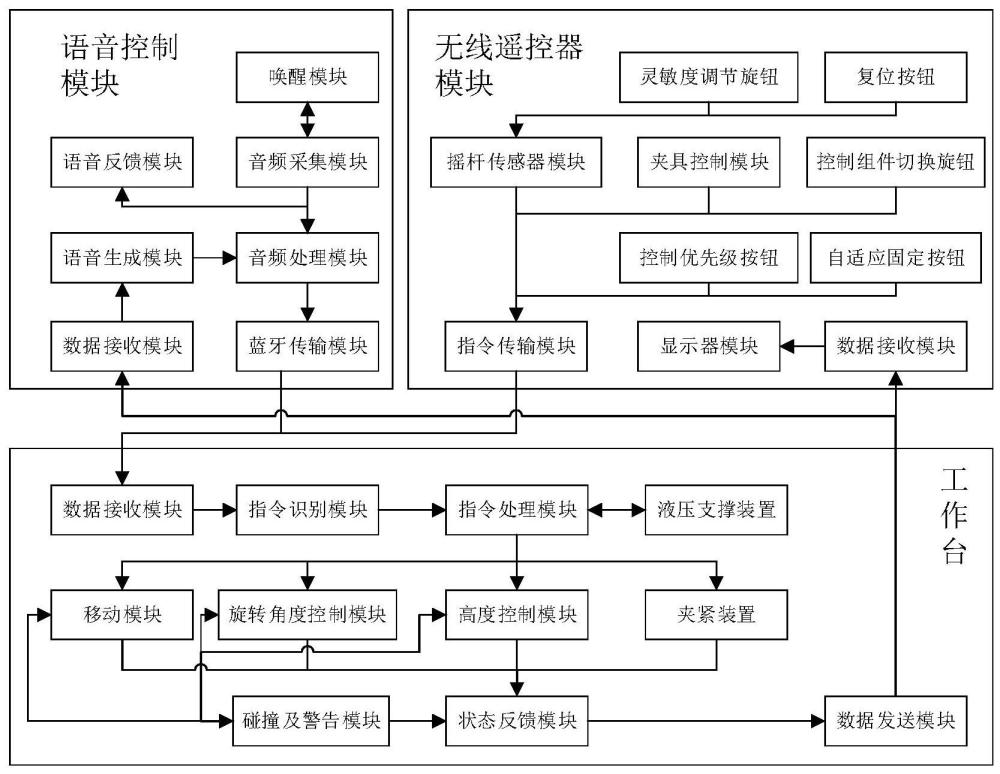
2、本发明提供了一种语音控制的移动式固定装置,包括语音控制控制模块、无线遥控器模块和工作台;
3、所述语音控制模块用于采集用户语音指令对工作台进行控制,以及获取指令执行结果反馈,包括唤醒模块、音频采集模块、音频处理模块、蓝牙传输模块、数据接收模块、语音生成模块以及语音反馈模块;所述音频采集模块分别连接所述唤醒模块、音频处理模块,所述音频处理模块还连接语音生成模块、语音反馈模块以及蓝牙传输模块,所述语音生成模块还连接数据接收模块,所述蓝牙传输模块还连接工作台的数据收集模块;
4、所述无线遥控器模块通过遥控器的多种按钮、旋钮组合以及摇杆对工作台进行控制,并通过遥控器上的显示器显示工作台状态及指令执行结果,包括指令传输模块、摇杆传感器模块、灵敏度调节旋钮、复位按钮、夹具控制模块、控制组件切换旋钮、控制优先级按钮、自适应固定按钮、数据接收模块和显示器模块;所述摇杆传感器模块分别连接灵敏度调节旋钮、复位按钮、指令传输模块,所述指令传输模块还连接夹具控制模块、控制组件切换旋钮、控制优先级按钮、自适应固定按钮以及工作台的数据收集模块,所述无线遥控器模块的数据接收模块分别连接显示器模块和工作台的数据发送模块;
5、所述工作台用于获取语音控制模块与无线遥控器模块发出的指令,对指令内容进行解析,从而控制工作台完成目标物品夹持与放松、工作台移动、工作台固定、目标物品高度控制以及旋转角度控制等操作,包括数据接收模块、指令识别模块、指令处理模块、液压支撑装置、移动模块、旋转角度控制模块、高度控制模块、夹紧装置、碰撞及警告模块、状态反馈模块和数据发送模块;所述指令处理模块分别连接指令识别模块、液压支撑装置、移动模块、旋转角度控制模块、高度控制模块、夹紧装置,所述指令识别模块还连接数据接收模块,所述工作台的数据接收模块还连接语音控制模块的蓝牙传输模块和无线遥控器模块的指令传输模块,所述移动模块还连接碰撞及警告模块和状态反馈模块,所述碰撞及警告模块还连接接旋转角度控制模块、高度控制模块以及状态反馈模块,所述状态反馈模块还连接旋转角度控制模块、高度控制模块、夹紧装置和数据发送发模块,所述数据发送模块还连接无线遥控器模块的数据接收模块和语音控制模块的数据接收模块。
6、进一步地,所述语音控制模块中,唤醒模块用于使设备从待机状态进入工作状态,开始对用户的话语进行监听、识别与回应,在唤醒方式上又分成语音唤醒与机械唤醒两种,语音唤醒通过用户呼出的唤醒词对设备进行唤醒,机械唤醒通过安装于语音控制模块下方的机械唤醒组件,获取用户说话时的下颚运行信息对设备进行唤醒;音频采集模块通过麦克风声音传感器获取用户话音指令;音频处理模块一方面对采集的音频信号进行处理,传输至蓝牙传输模块,另一方面对生成的音频进行处理,传输至语音反馈模块;蓝牙传输模块用于将语音控制装置与工作台进行配对,并将音频电信号传输至工作台;数据接收模块用于获取工作台返回的指令反馈数据;语音生成模块通过对指令反馈数据的处理,生成音频电信号;语音反馈模块利用扬声器喇叭将音频电信号转换成声波,反馈给用户;
7、所述无线遥控器模块中,指令传输模块用于向工作台发送操作指令;摇杆传感器模块通过霍尔摇杆对工作台的移动、升降、旋转角度进行控制,摇杆采用半球旋转结构,可进行垂直方向最大180°、水平方向最大360°的旋转角控制,可在半球范围内精准定位3维坐标点;灵敏度调节旋钮用于调节摇杆传感器模块中摇杆灵敏度,以及调整摇杆的力位移特性,通过反作用力的形式施加到操纵杆上;复位按钮用于对摇杆以及工作台旋转角控制装置进行复位,如果摇杆不在原点位置,按压复位按钮,仅将摇杆进行复位,保留工作台旋转角控制装置原坐标位置;如果摇杆已在原点位置,按压复位按钮将对工作台旋转角控制装置进行原点复位;夹具控制模块用于控制工作台的夹具装置夹紧或者放松;控制组件切换旋钮用于切换摇杆控制的工作台部件,旋钮档位包括移动档、升降档、旋转档三档,当旋钮处于移动档时,无线遥控器模块可以通过摇杆控制工作台的前后左右移动;当旋钮处于升降档时,无线遥控器模块可以通过摇杆控制工作台升降部件进行上升或者下降;当旋钮处于旋转档时,无线遥控器模块可以通过摇杆控制工作台的旋转部件进行多角度旋转;控制优先级按钮用于在同时进行语音控制及遥控器控制时,对二者发出的指令做优先级区分,控制优先级按钮处于弹起状态时表示遥控器优先控制,按钮处于触发状态时表示语音控制装置指令优先;自适应固定按钮用于控制工作台的液压支撑装置配合距离传感器以及重量传感器自动进行调整,固定工作台底座,防止工作台在进行其他操作时发生偏移;数据接收模块用于接收工作台执行操作后反馈的信息;显示器模块用于显示当前工作台状态,包括各部件工作状态、夹具距离水平地面高度、目标物品当前所处的旋转3维坐标点信息等,另外还会显示指令执行状态以及指令执行结果反馈信息;
8、所述工作台中,数据接收模块用于接收语音控制模块与无线遥控器模块的指令数据;指令识别模块用于识别指令内容对指令进行解析;指令处理模块用于对指令进行处理,对于语音文本指令进行语义理解,将指令处理成可用于其他部件进行指令操作的指令数据包;对于遥控器指令,进行摇杆坐标点转换,指令执行部件匹配;液压支撑装置用于对工作台进行自适应的固定,防止工作台在对目标物进行升降、旋转等操作时发生偏移,并且检查工作台重心偏移情况,实时调整支撑方向与支撑力;移动模块用于根据指令对工作台进行任意方向的移动;旋转角度控制模块用于工作台对夹持的目标物品进行垂直平面270°、水平平面360°的旋转;高度控制模块用于工作台对夹持的目标物品进行高度调节;夹紧装置用于工作台对目标物品进行夹紧或放松;碰撞及警告模块用于检测工作台及夹持的目标物品与周围环境的碰撞情况,在发生与障碍物接触时对相应部件进行调节或终止指令执行,并生成反馈数据通过其他模块将其反馈给用户;状态反馈模块接收各个执行部件指令执行结果,统合反馈数据,并对数据进行核实,在显示器上显示状态信息,并将其传输至数据发送模块;数据发送模块用于将工作台生成的反馈数据发送给语音控制装置和无线遥控器控制装置,便于用户对工作台的当前状态,以及指令执行状况进行实时掌握。
9、进一步地,所述语音控制模块中制作语音唤醒模型的方法步骤包括:
10、步骤101:定义唤醒词,定义“开始工作”为唤醒词;
11、步骤102:对步骤101定义的唤醒词,在多种添加噪声的场景下录制多种发音数据;
12、步骤103:进行训练唤醒模型,把唤醒词转换成特征序列,作为标准模板;然后再把输入的语音转换成同样的格式,使用基于模板匹配的动态时间规整算法计算当前音频是否和模板匹配,匹配则唤醒,不匹配则继续休眠;动态时间规整算法将语音时间序列进行拉伸或者压缩,使序列进行对齐,然后使用规整路径距来衡量两个时间序列之间的相似性;假设两条音频的时间序列为q和c,长度分别为|q|和|c|,用w表示规整路径,w的第k个元素定义为wk=(i,j)k,其中i表示的是q中的i坐标,j表示的是c中的j坐标,则:
13、w=w1,w2,…,wk,其中,max(|q|,|c|)≤k≤|q|+|c|;
14、另外,w中w(i,j)的i和j必须是单调增加的,即:
15、wk=(i,j),wk+1=(i′,j′)i≤i′≤i+1,j≤j′≤j+1
16、计算得出规整代价最小的路径为:
17、
18、步骤104:对唤醒模型进行测试并迭代,通过调整模型的超参数、增加数据量、优化特征提取方法等方式进行优化。
19、进一步地,在步骤104中,进行唤醒后,设备将开始通过音频采集模块的麦克风声音传感器对近场环境下的用户的话音指令进行采集,将麦克风所采集到的模拟电信号通过经信号处理的放大电路进行扩大、调整增益、滤波、降噪等操作后,输出成为一定范围内的模拟电信号,传输至音频处理模块进行音频处理;
20、音频处理模块工作内容包括两个方面,一是对采集的音频数据进行处理,二是对生成的音频数据进行处理;对采集的音频数据进行处理时,调整音频比特率,对音频数据进行压缩后再传输给蓝牙传输模块;对生成的音频进行处理时,优化音频数据,对语音、说话风格、语速以及语调进行调整,调整音量大小、增强低音、增加高音,随后将数据传输至语音反馈模块;
21、蓝牙传输模块用于建立语音控制装置与工作台的蓝牙连接,对音频数据进行编码并传输至工作台;在进行蓝牙连接时,如果为初次连接,则需要与工作台先建立蓝牙配对,如果非初次连接,在启动语音控制装置后,便于工作台自动进行配对连接;在进行传输前,将信号分割成小段,并对每段信号添加同步字节,以确保接收端可以正确解码和重构整个信号;在蓝牙传输时采用频率跳跃技术,在不频繁更换频率的情况下切换到不同的频率,保证数据安全以及避免干扰;
22、语音控制模块的数据接收模块用于获取工作台返回的工作台状态数据以及指令反馈数据,并对数据进行解码成相应文本后传输至语音生成模块;
23、语音生成模块对反馈的文本数据进行文本到音频的语音合成,并与预设的音频进行拼接,组成完整的状态反馈话音,随后该数据将被传输至音频处理模块。
24、进一步地,制作语音合成模型的方法步骤包括:
25、步骤201:针对所有可能的指令内容制作指令文本;
26、步骤202:对步骤201文本数据进行文本分析,对文本内容正则化,将文本中的表达进行规范化和消歧,以便于后续的文本处理流程,并将正则化后的文本进行单词转音素得到音素串,提取音素、音素时长、词性等不同粒度的文本特征;
27、步骤203:用声码器模块从训练语料库的语音数据中提取步骤202处理后文本的频谱、基频等声学特征作为声学模型训练参数特征;
28、步骤204:用步骤203获取的文本特征和声学特征对声学模型进行训练,声学模型将从输入的文本信息还原语音中蕴含的音色信息、韵律信息和情感信息等;
29、步骤205:获取工作台反馈的指令文本数据,对文本自然语言分析、处理和整合,转换成便于用户理解的长指令文本数据;
30、步骤206:对步骤205得到的数据进行文本分析,将得到的文本特征输入到步骤204中训练好的声学模型中,得到预测的频谱、基频等参数特征;
31、步骤207:将步骤206获取的频谱、基频等参数特征输入声码器,声码器对其进行原尺度幅度谱复原、重构相位、频域信号转换为时域信号等操作,将参数特征转化为语音。
32、本发明还提供了一种语音控制的移动式固定装置的功能性组件,基于如上所述的语音控制的移动式固定装置,所述语音控制模块的架构性实例化包括:
33、防滑部件,用于将整个装置挂于耳后;
34、装置外壳,与所述防滑部件一体成型,所述装置外壳内部包含有主控芯片、蓝牙模块、音频处理芯片、电源管理模块;
35、喇叭模块,安装于所述装置外壳表面,用于向用户语音播报工作台状态及指令执行反馈信息;
36、机械唤醒组件接口以及机械唤醒运动组件,安装于所述装置外壳远离所述防滑部件的一侧;
37、末端可调节的机械唤醒组件,与机械唤醒组件接口以及机械唤醒运动组件相结合用于唤醒设备,切换设备的待机状态与工作状态;
38、麦克风传感器部件,安装于所述装置外壳的外表面,用于接收用户呼入的指令话音;
39、所述无线遥控器模块的结构性实例化包括:
40、外壳;
41、显示器模块,所述显示器模块设置在所述外壳的表面上部;
42、摇杆帽组件,所述摇杆帽组件设置在所述外壳的表面并位于所述显示器模块下方;
43、摇杆连接、锁定与阻力组件,与所述摇杆帽组件连接,用于在固定摇杆,以及调节摇杆灵敏度时提供力学反馈;
44、摇杆坐标点定位组件,与所述摇杆连接、锁定与阻力组件连接;
45、控制优先级滑块,设置在所述外壳的表面并位于所述摇杆帽组件下方,向左时表示无线遥控器控制优先,向右时表示语音控制优先;
46、自适应固定按钮,设置在所述外壳的表面并靠近所述控制优先级滑块;
47、灵敏度调节旋钮,设置在所述外壳的表面,旋钮向左调节表示降低灵敏度,向右调节表示增加灵敏度;
48、自动回弹的复位按钮,设置在所述外壳的表面;
49、夹具夹紧与放松按钮,设置在所述外壳的表面,按钮弹起时为夹具放松;
50、控制组件切换旋钮,设置在所述外壳的表面,其中1档位为移动档,2档位为升降档,3档位为旋转档;
51、遥控器固定抓手,设置在所述外壳上远离所述显示模块的一面,表面用于防止用户在操控遥控器时发生抖动;
52、无线信号发射与接收装置,设置在于所述外壳上与所述显示模块相邻的一面,用于实现无线遥控器与工作台的信息传输;
53、所述工作台的结构性实例化包括:
54、夹紧装置,用于对目标物品进行夹紧或放松,可以进行多种形状的物品夹紧;
55、旋转角控制装置垂直方向的旋转及连接部件,位于所述夹紧装置下方,用于控制夹紧装置垂直方向最大270°的移动,其还配置了力学传感装置,用于获取夹持物品与外界障碍物接触情况;
56、旋转角控制装置水平方向的选装及连接部件,位于所述夹紧装置下方,用于控制夹紧装置水平方向360°的移动;
57、组合式多节升降杆的高度控制装置,位于所述旋转角控制装置水平方向的选装及连接部件下方,可以在垂直方向进行上升或下降操作;
58、工作台显示器,位于工作台主体框架上,用于显示当前工作台各部件状态;
59、显示器支撑及收缩部件,在工作台工作时可将抬起显示器,便于用户查看,在工作台结束工作时,可以将显示器收起至工作台内部,对其进行保护;
60、工作台主体框架,用于集成、支撑和搭载多种载荷组件;
61、液压支撑装置支撑架部件,其支脚采用抓地防滑设计,在固定工作台时能有效防止其移动;
62、液压支撑装置的支撑架调节部件,用于调节支撑架,进行重心偏转;
63、工作台的移动轮组,用于进行工作台的地面移动,其轴承上安装有重力传感器,用于辅助支撑装置的自适应调节。
64、本发明还提供了一种语音控制的移动式固定装置的相关方法,基于如上所述的语音控制的移动式固定装置的功能性组件,对摇杆坐标系在工作台移控制组件、高度控制组件、旋转角控制组件上的参数转换方法及步骤包括:
65、步骤301:获取摇杆坐标系移动目标点的坐标为(x1,x2,x3);
66、步骤302:获取操作部件的参数,并对步骤301中获取摇杆坐标点参数进行转换,得到不同组件转化结果;
67、步骤303:步骤302中转换的参数传输至相应组件,组件按照参数内容进行相应的操作。
68、进一步地,步骤302中,对不同组件转化结果如下:
69、对于移动控制组件,将前后左右方向按360°映射为对应方向,设其最终获取的方向为θm,速度为vm,最大速度为vmax,z轴最大坐标为zmax,则:
70、
71、
72、对于高度控制组件,设移动方向为dh,速度为vh,最大速度为vmax,x轴最大坐标为xmax,则:
73、
74、
75、对于旋转角控制组件,设旋转角控制组件原点坐标为(x0,y0,z0),旋转后的坐标点为p(xr,yr,zr),则:
76、
77、进一步地,移动式固定装置语音控制及遥控器控制方法实现流程包括:
78、步骤401:启动工作台,根据需要启动语音控制装置,或启动无线遥控器控制装置,或语音控制装置与无线遥控器控制装置同时启动;
79、步骤402:将语音控制装置、无线遥控器控制装置与工作台进行配对连接,对预设项进行自主检测,并反馈用户设备自检情况;对于进行机械唤醒的语音控制装置还需要工作人员对机械唤醒装置进行测试;设备自检测完成后,提醒用户设备已可以正常工作;
80、步骤403:打开工作台夹紧装置,将所需固定的目标物品放置在夹紧装置上;
81、步骤404:夹紧固定物品,用户通过语音控制装置对准麦克风口呼“夹紧\固定\收紧物品”等指令,控制工作台夹紧装置对物品进行夹紧,也可以按下无线遥控器控制装置的夹具控制按钮对物品进行夹紧;
82、步骤405:移动工作台,用户通过语音控制装置对准麦克风口呼“工作台前进\向前\后退\向后”、“工作台向左\向右\顺时针\逆时针xx角(度)前进\后退”等指令,控制工作台进行指定方向的移动方向,通过口呼“加速\快速\快一点\减速\缓慢\慢一点”等指令控制工作台移动速度,也可以通过旋转无线遥控器控制装置的控制组件切换旋钮到“移动”档位,旋转摇杆对工作台进行方向和速度的控制;
83、步骤406:固定工作台,用户通过语音控制装置对准麦克风口呼“工作台固定”等指令,控制工作台的液压支撑装置对工作台进行自适应固定,也可以按下无线遥控器控制装置的自适应固定按钮对工作台进行固定;
84、步骤407:控制物品高度,用户通过语音控制装置对准麦克风口呼“向上\上升\升高\向下\下降\降低”等指令,控制工作台的高度控制装置进行上升或下降,也可以通过旋转无线遥控器控制装置的控制组件切换旋钮到“升降”档位,上下推动摇杆控制高度控制装置升降方向和升降速度;
85、步骤408:控制物品角度,用户通过语音控制装置对准麦克风口呼“物品向x\y\z轴方向移动n个单位”等指令,控制工作台的旋转角控制装置移动物品到指定角度,也可以通过旋转无线遥控器控制装置的控制组件切换旋钮到“旋转”档位,摇动摇杆到指定位置控制旋转角控制装置位移方向;
86、步骤409:重复步骤404至步骤408直至目标物品被移动到理想的位置;
87、步骤410:释放物品,用户通过语音控制装置对准麦克风口呼“物品释放\松开\放下”等指令,控制工作台夹紧装置对物品进行放松,也可以复位无线遥控器控制装置的夹具控制按钮对物品进行放松;
88、步骤411:结束操作,关闭设备,工作台的液压支撑装置、夹紧装置、高度控制装置、旋转角控制装置以及显示器自动复位。
89、进一步地,所述步骤404至步骤410中,同时使用语音控制装置和无线遥控器控制装置对工作台进行控制时,可以通过无线遥控器控制装置的语音控制优先按钮控制语音指令与遥控器指令的优先级;按下语音控制优先按钮时,工作台在同时接收到语音控制装置和无线遥控器控制装置指令时优先执行语音指令;复位语音控制优先按钮时,工作台优先执行遥控器指令;
90、所述步骤405、步骤407以及步骤408中,使用无线遥控器控制装置的摇杆对工作台进行控制时,可以通过灵敏度调节旋钮对摇杆的灵敏度进行调节;当降低灵敏度时,摇杆将增大力学阻力,用户需要使用更大的力度移动摇杆,工作台对摇杆的位移反应也将变慢,增大灵敏度时则与之相反;
91、所述步骤405和步骤407中,松开摇杆后,摇杆将自动复位到原点位置;所述步骤408中,将对摇杆移动位置进行锁定,不自动进行原点复位;所述步骤409中,当控制组件切换旋钮从“旋转”档,切换到其他档位时,工作台将记录切换前旋转角控制装置的坐标位置参数,在下一次旋转时将其作为旋转装置的坐标原点;
92、所述步骤408中,使用无线遥控器控制装置的摇杆对工作台旋转角控制装置进行控制时,按压复位按钮可对摇杆或工作台旋转角控制装置进行复位;当摇杆位置不处于原点位置时,按压复位按钮仅对摇杆进行原点复位;当摇杆位置处于原点位置时,按压复位按钮将对工作台旋转角控制装置进行原点复位,同时记录复位前旋转角控制装置的坐标位置参数,在下一次旋转时将其作为旋转装置的坐标原点;
93、所述步骤405至步骤409中,工作台的碰撞及告警装置传感器将实时检测工作台及夹持物品与周围障碍物的接触情况,在发生障碍物接触时,将终止相应部件的指令继续执行,并将指令执行状况、部件工作状态传输至反馈装置;
94、所述步骤402至步骤410中,所有指令执行过后,用户都将接收到工作台状态及指令执行结果;工作台的信息反馈装置将在显示器上显示状态信息,并将信息反馈至语音控制装置和无线遥控控制装置,语音控制装置将会把反馈信息转换成语音播报,通过喇叭播报给用户,无线遥控控制装置将会把反馈信息显示在遥控器的显示器上。
95、本发明的有益效果为:
96、1、本发明实现了复杂噪音环境及狭小空间下,语音及无线遥控装置对固定装置的控制,操作更加精准快捷,语音控制解放工作人员双手,可远距离进行设备操控,突破了视距上的局限性,便于工作人员进行复杂操作。
97、2、语音控制装置与无线遥控器控制装置既可以单独形式对工作台进行操作,又可以组合形式同时对工作台进行操作,能够满足单人或多人协作完成复杂的板材固定操作或应对面积大、超视野、盲区多的板材固定需求,为安全生产提供了进一步的保障。
98、3、通过自然语言处理技术可以更直观地理解工作人员话音含义,使工作人员在呼入的语音指令更加自由化。
99、4、自适应液压支撑装置,实时依据工作台重心变化进行自适应调整,使板材在发生位移时工作站依旧保持稳定,避免人工操作失误。
100、5、灵活的夹紧装置可以满足不同夹紧形式的板材固定,多向夹紧装置还可以同时实现参差平面的双向板材固定。夹紧装置可依据板材固定需求的变化而替换,拆卸下来的夹紧装置还可以单独使用,使固定装置能够应对不同的板材固定场景。
101、6、板材固定装置搭载了遥控移动部件,具有便携性特点,板材的运输与固定更加便捷,省时省力,极大地提高了工作人员的工作效率。
102、7、采用垂直方向270°,水平方向360°旋转装置,在固定板材时可以实现多角度固定操作,电动操作使角度控制更加精准。
103、8、碰撞与告警模块以及状态反馈模块,使工作人员实时掌握工作台及板材状态,可以及时应对突发情况,对操作指令进行及时的调整。
104、9、模块化组件便于进行拆卸及迭代升级。
本文地址:https://www.jishuxx.com/zhuanli/20240618/22133.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表