一种声场记录方法与系统
- 国知局
- 2024-06-21 11:44:04
本发明属于声场记录,涉及一种声场记录方法与系统。
背景技术:
1、声场记录的目的是捕获和保留特定区域的声场信息,通常录制的声场通过模态分解方法被分解为一组模态的叠加。模态分解方法的一个优点是它使录制的声场与传声器的设置无关。在三维空间中,球谐(spherical harmonic,sh)函数是模态分解的常见选择,而球形传声器阵列通常用于获取球谐函数的系数。基于sh函数的模态分解也被称为高阶ambisonics(higher order ambisonics,hoa)。
2、基于sh函数的模态分解的一个主要特性是方向独立性,即sh基模态分解同等对待不同方向的声音。然而,在许多实际应用场景中,声场录音问题是方向相关的,例如声源发出声波的方向分布在实际中可能不均匀,以及当声源靠近水平面时,人类声音定位的分辨率较高。
3、为了适配方向相关的声场记录,目前已经有研究人员提出了几种改进的方向相关的模态分解方法。然而,这些方法要么具有受限的应用场景,要么不是误差最小的。例如,混合阶ambisonics通过选择适当的sh函数子集来提高水平性能,基于空间扭曲实现hoa的非均匀空间分辨率编码,然而,这两种方式需要基于经验去选择某些参数;使用球形扇形谐(spherical sector harmonics)函数或球形slepian函数作为基函数,但是这两种方式需要声音方向在一个有限的范围内;分段球谐(spherical segment harmonics)函数和分数球谐(spherical fraction harmonics)函数要求录制环境具有特定的边界条件,仅当实际录制环境满足其特定边界条件时,它们才是误差最小的。
技术实现思路
1、为解决现有技术中存在的不足,本发明提供一种声场记录方法与系统,通过利用声波分布和方向重要性的先验知识,得到使声场记录误差最小的最优基函数和最优编码矩阵,使方向相关声场记录的误差最小。
2、本发明采用如下的技术方案。
3、一种声场记录方法,所述方法包括以下步骤:
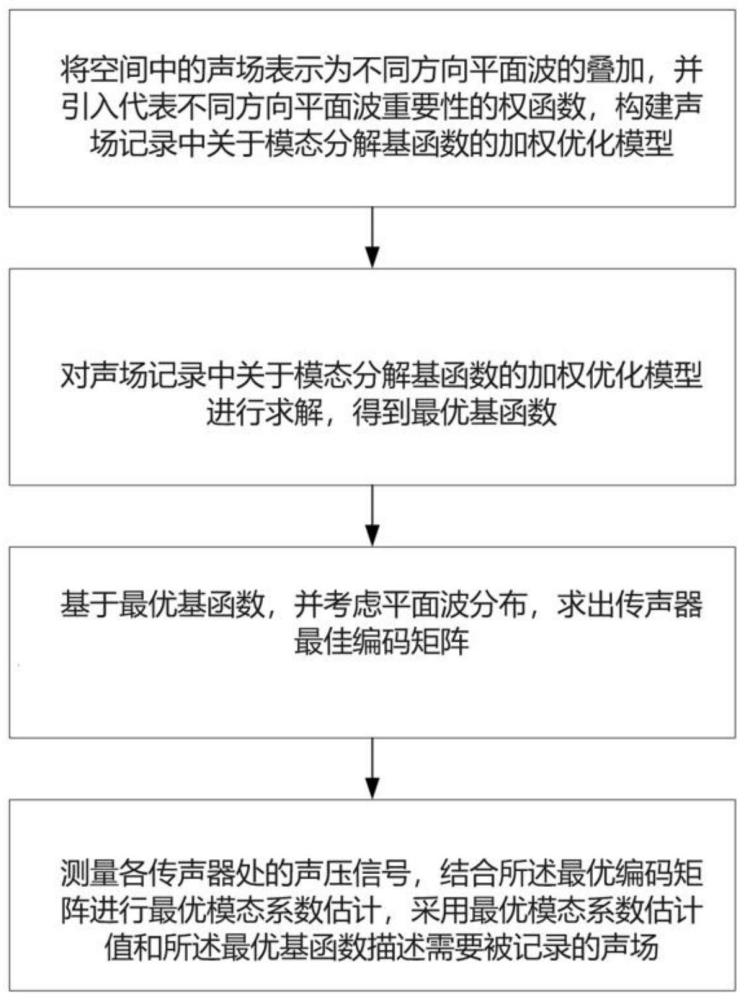
4、步骤1:将空间中的声场表示为不同方向平面波的叠加,并引入代表不同方向平面波重要性的权函数,构建声场记录中关于模态分解基函数的加权优化模型;
5、步骤2:对声场记录中关于模态分解基函数的加权优化模型进行求解,得到最优基函数;
6、步骤3:基于步骤2得到的最优基函数,并考虑平面波分布,求出传声器最佳编码矩阵;
7、步骤4:测量各传声器处的声压信号,结合所述最优编码矩阵进行最优模态系数估计,采用最优模态系数估计值和所述最优基函数描述需要被记录的声场。
8、优选地,步骤1中,构建的声场记录中关于模态分解基函数的加权优化模型为:
9、
10、
11、其中,为期望函数,s.t.表示约束;
12、j(ψ,uopt,a)为对于基函数向量ψ,使用最优模态系数uopt进行声场记录的加权误差;
13、ψ为平面波的复振幅a模态分解时m个基函数组成的m×1的基函数向量,其在方向的取值为
14、为大于0的权函数,代表方向平面波的重要性;
15、θ为天顶角,为方位角;i为单位阵;h为矩阵的共轭转置;
16、为在单位球面上进行面积分。
17、优选地,所述加权误差为:
18、
19、其中,为来自方向的平面波的复振幅;
20、为的共轭。
21、优选地,最优模态系数为:
22、
23、优选地,步骤2中,求解得到的最优基函数为:
24、
25、其中,为方向平面波的复振幅模态分解时的最优基函数;
26、是对角线元素大于0的对角阵,l是中间变量w的秩;
27、为离散化时n×1的sh函数构成的向量,n为sh函数的数量;为基函数向量ψ在方向的取值;θ为天顶角,为方位角;
28、为正交阵,为正交阵:为复数集。
29、优选地,步骤3中,传声器最佳编码矩阵e的求解函数为:
30、
31、其中,tr(·)为矩阵的迹;是从模态到传声器声压的传递函数矩阵;
32、topt为离散化对应的系数,满足
33、为离散化时n×1的sh函数构成的向量;为基函数向量ψ在方向的取值;
34、i为单位阵;h为矩阵的共轭转置;w为中间变量;σ为噪声的标准差;
35、为a的协方差矩阵,为期望函数,a为离散化对应的系数;为来自方向的平面波的复振幅,θ为天顶角,为方位角。
36、优选地,步骤3中,求解得到的传声器最佳编码矩阵e为:
37、
38、其中,topt为最优基函数离散化对应的系数;
39、w为中间变量;σ为噪声的标准差;
40、为a的协方差矩阵,为期望函数,a为离散化对应的系数,为来自方向的平面波的复振幅,θ为天顶角,为方位角;
41、i为单位阵;h为矩阵的共轭转置;
42、是从模态到传声器声压的传递函数矩阵。
43、优选地,步骤4中,将各传声器处的声压信号p与最优编码矩阵e相乘得到最优模态系数估计值u′opt:
44、
45、其中,topt为最优基函数离散化对应的系数;
46、w为中间变量;σ为噪声的标准差;
47、为a的协方差矩阵,为期望函数,a为离散化对应的系数,为来自方向的平面波的复振幅,θ为天顶角,为方位角;
48、i为单位阵;h为矩阵的共轭转置;
49、是从模态到传声器声压的传递函数矩阵。
50、优选地,步骤4中,将最优模态系数估计值u′opt和所述最优基函数相乘以描述需要被记录的声场:
51、
52、其中,为来自方向的平面波的复振幅,表示空间中方向的声场;θ为天顶角,为方位角;
53、topt为最优基函数离散化对应的系数;
54、w为中间变量;σ为噪声的标准差;
55、为a的协方差矩阵,为期望函数,a为离散化对应的系数,为来自方向的平面波的复振幅,θ为天顶角,为方位角;
56、i为单位阵;h为矩阵的共轭转置;
57、是从模态到传声器声压的传递函数矩阵。
58、优选地,中间变量w为:
59、其中,为大于0的权函数,代表方向平面波的重要性;
60、为在单位球面上进行面积分;
61、为离散化时n×1的sh函数构成的向量;为基函数向量ψ在方向的取值;
62、h为矩阵的共轭转置。
63、一种声场记录系统,包括:
64、模型构建模块,用于将空间中的声场表示为不同方向平面波的叠加,并引入代表不同方向平面波重要性的权函数,构建声场记录中关于模态分解基函数的加权优化模型;
65、模块求解模块,用于对声场记录中关于模态分解基函数的加权优化模型进行求解,得到最优基函数;
66、矩阵求解模块,用于基于所述最优基函数,并考虑平面波分布,求出传声器最佳编码矩阵;
67、声场记录模块,用于测量各传声器处的声压信号,结合所述最优编码矩阵进行最优模态系数估计,采用最优模态系数估计值和所述最优基函数描述需要被记录的声场。
68、一种终端,包括处理器及存储介质;所述存储介质用于存储指令;
69、所述处理器用于根据所述指令进行操作以执行所述方法的步骤。
70、计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现所述方法的步骤。
71、本发明的有益效果在于,与现有技术相比:
72、本发明利用声波分布和方向重要性的先验知识,可以得到使声场记录误差最小的基函数和编码矩阵,使方向相关声场记录的误差最小,具体的:
73、本发明将声场表示为平面波的叠加,并考虑到声波分布和方向重要性,将方向相关声场记录的模态分解问题写为平面波振幅误差的加权最小二乘问题,逐步求解出最优基函数、最优编码矩阵,以用于描述需要被记录的声场,其利用声波分布和方向重要性的先验知识,避免了基于经验去选择参数,且声场记录的误差更低;且该问题不对声音方向和实际录制环境的边界条件进行限制,因此不需要声音方向在一个有限的范围内,也不需要实际录制环境满足某些特定的边界条件。
本文地址:https://www.jishuxx.com/zhuanli/20240618/23206.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。