一种教学用轮式机器人的制作方法
- 国知局
- 2024-06-21 13:59:17
本技术涉及机器人,具体涉及一种教学用轮式机器人。
背景技术:
1、机器人的发明、研究及应用实践是以科学研究和社会生产为需求的,进入到教育是其领域的扩大与发展。由于它所涉及知识的广泛性和涉及技术的综合性,使得机器人对教育而言具有更多的价值。
2、机器人教育是通过组装、搭建、运行玩具机器人来激发学生的学习兴趣、培养学生的综合能力。机器人教育让学生了解机器人的发展和应用现状,理解机器人的概念和工作方式,为进一步学习机器人技术的有关知识打下基础;让学生了解机器人各个传感器的功能,学习编写简单的机器人控制程序,提高学生分析问题和解决问题的能力;通过玩具机器人竞赛和完成各项任务,使学生在搭建机器人和编制程序的过程中培养动手能力、协作能力和创造能力。
3、目前,在科教机器人中,大多数机器人融合了机械原理、电子传感器、计算机软硬件和人工智能等众多先进技术,而在面向低学龄学生的玩具机器人则需要将这些先进技术简单化,既能让学生接触到相关技术,又需要带有一定的趣味性,能激发学生的学习兴趣。
4、现行的教育用机器人主要以颗粒型搭建的机器人、轮式机器人为主,然而现有的轮式机器人在操作台面上行驶时,当台面出现凸起或凹陷的情况下,轮式机器人的车轮会出现悬空状态而导致轮式机器人停止或翻车,不具有越障功能。
技术实现思路
1、为克服现有技术的不足,本实用新型提出一种教学用轮式机器人,包括机器人车架底板,所述机器人车架底板的四个端角处均设置有驱动机器人车架底板行驶的车轮,每两个沿着机器人车架底板长边方向相邻的所述车轮之间通过连接件与机器人车架底板活动连接。
2、为实现上述目的,通过两个相对设置的连接件以便于四个车轮与机器人车架底板活动连接,驱动机器人车架底板行驶,满足机器人车架底板在室内行走需要的同时,也使得机器人车架底板具有越障功能,提高了机器人车架底板的工作效率,也便于学生理解机械结构。
3、进一步地,所述连接件包括设置在机器人车架底板上表面的四个固定块,四个所述固定块设置在机器人车架底板上表面中间位置且相对设置,每两个相邻的所述固定块之间均转动连接有短轴,各个所述短轴的两端分别穿设出相邻的固定块,所述短轴穿设出固定块的一端固定有倒v型连杆,所述倒v型连杆的两端沿着机器人车架底板的长边方向弯曲延伸,各个所述倒v型连杆的弯曲延伸端均与相邻的车轮转动连接。
4、通过上述技术方案,通过倒v型连杆和车轮的配合,以便于装置适用于起伏不定的操作台面,四个车轮均与操作台面接触,使得装置具有越障功能。
5、进一步地,所述倒v型连杆的两端均固定有驱动相邻车轮转动的电机。
6、通过上述技术方案,通过设置四个电机,驱动相邻的车轮转动,即使有一个车轮悬空,也不影响其他车轮的转动,进而不影响车体行驶。
7、进一步地,所述机器人车架底板上表面中间位置设置有位于两个固定块之间且与两个倒v型连杆配合使得装置在交错型起伏台面上移动的控制件。
8、通过上述技术方案,当机器人车架底板需要在交错型起伏台面上移动时,将控制件安装在两个固定块之间,使得装置在移动过程中时,四个车轮同时与台面接触,在交错起伏型台面上仍可行驶。
9、进一步地,两个所述短轴穿设出固定块的另一端分别固定有a斜齿轮和b斜齿轮,a斜齿轮和b斜齿轮分别与连接的短轴同轴固定,两个所述固定块之间设置有与机器人车架底板上表面固定的两个安装块,两个所述安装块之间转动连接有连接轴,所述连接轴上同轴固定有与a斜齿轮和b斜齿轮啮合的c斜齿轮。
10、通过上述技术方案,当一侧车轮遇到障碍时,会通过a斜齿轮、c斜齿轮和b斜齿轮的配合调整另一侧车轮的相对高度,当两侧车轮同时遇到障碍时,都会通过a斜齿轮、c斜齿轮和b斜齿轮的配合调整自己的相对高度,以适应不同的路况,避免翻车。
11、进一步地,所述机器人车架底板上表面通过螺栓固定有车盖,车盖上表面开设有若干插孔。
12、通过上述技术方案,各个实现不同功能的模块通过插孔与车盖插紧连接,以便于实现装置的若干功能,提高装置的趣味性。
13、综上所述,该教学用轮式机器人具有以下有益效果:
14、(1)该教学用轮式机器人,通过两个相对设置的连接件以便于四个车轮与机器人车架底板活动连接,驱动机器人车架底板行驶,满足机器人车架底板在室内行走需要的同时,也使得机器人车架底板具有越障功能,提高了机器人车架底板的工作效率,也便于学生理解机械结构。
15、(2)该教学用轮式机器人,当机器人车架底板需要在交错型起伏台面上移动时,将控制件安装在两个固定块之间,使得装置在移动过程中时,四个车轮同时与台面接触,在交错起伏型台面上仍可行驶。
技术特征:1.一种教学用轮式机器人,其特征在于,包括机器人车架底板(1),所述机器人车架底板(1)的四个端角处均设置有驱动机器人车架底板(1)行驶的车轮(2),每两个沿着机器人车架底板(1)长边方向相邻的所述车轮(2)之间通过连接件与机器人车架底板(1)活动连接。
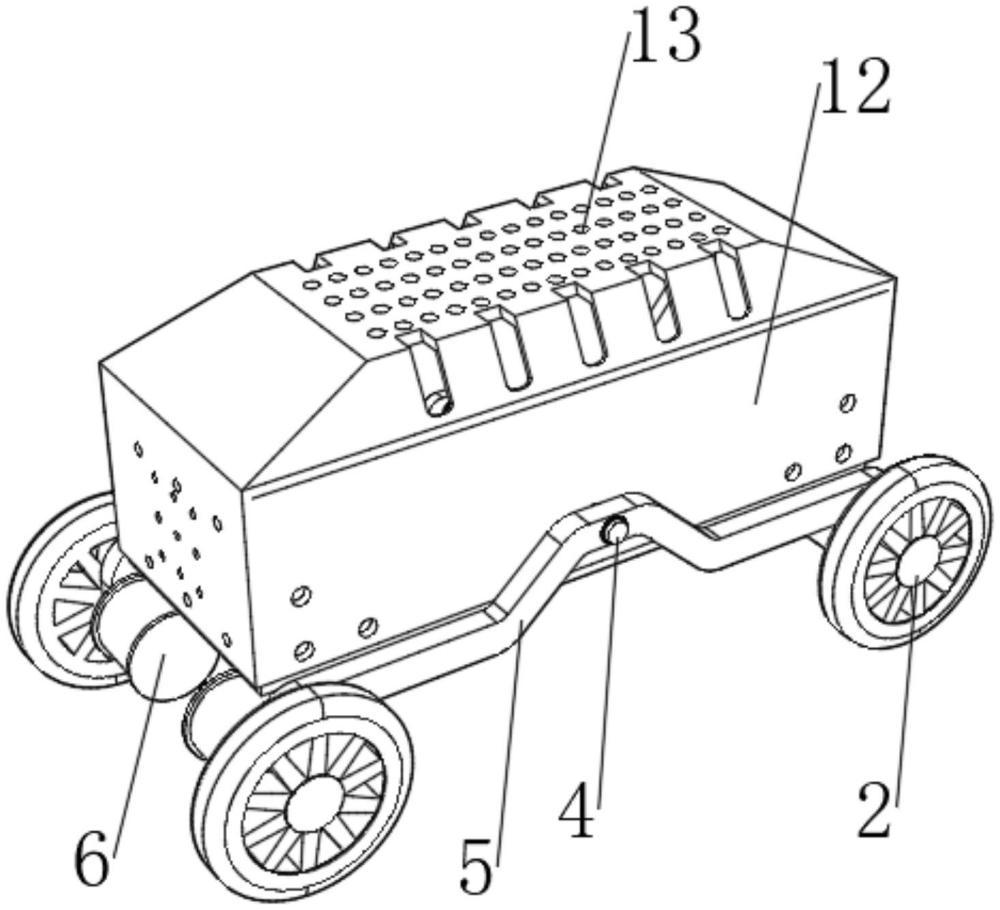
2.根据权利要求1所述的一种教学用轮式机器人,其特征在于,所述连接件包括设置在机器人车架底板(1)上表面的四个固定块(3),四个所述固定块(3)设置在机器人车架底板(1)上表面中间位置且相对设置,每两个相邻的所述固定块(3)之间均转动连接有短轴(4),各个所述短轴(4)的两端分别穿设出固定块(3),所述短轴(4)穿设出固定块(3)的一端固定有倒v型连杆(5),所述倒v型连杆(5)的两端沿着机器人车架底板(1)的长边方向弯曲延伸,各个所述倒v型连杆(5)的弯曲延伸端均与相邻的车轮(2)转动连接。
3.根据权利要求2所述的一种教学用轮式机器人,其特征在于,所述倒v型连杆(5)的两端均固定有驱动相邻车轮(2)转动的电机(6)。
4.根据权利要求2所述的一种教学用轮式机器人,其特征在于,所述机器人车架底板(1)上表面中间位置设置有位于两个固定块(3)之间且与两个倒v型连杆(5)配合使得装置在交错型起伏台面上移动的控制件。
5.根据权利要求4所述的一种教学用轮式机器人,其特征在于,两个所述短轴(4)穿设出固定块(3)的另一端分别固定有a斜齿轮(7)和b斜齿轮(8),a斜齿轮(7)和b斜齿轮(8)分别与连接的短轴(4)同轴固定,两个所述固定块(3)之间设置有与机器人车架底板(1)上表面固定的两个安装块(9),两个所述安装块(9)之间转动连接有连接轴(10),所述连接轴(10)上同轴固定有与a斜齿轮(7)和b斜齿轮(8)啮合的c斜齿轮(11)。
6.根据权利要求1所述的一种教学用轮式机器人,其特征在于,所述机器人车架底板(1)上表面通过螺栓固定有车盖(12),车盖(12)上表面开设有若干插孔(13)。
技术总结本技术提出一种教学用轮式机器人,涉及机器人技术领域,包括机器人车架底板,机器人车架底板的四个端角处均设置有驱动机器人车架底板行驶的车轮,每两个沿着机器人车架底板长边方向相邻的车轮之间通过连接件与机器人车架底板活动连接,该教学用轮式机器人,通过两个相对设置的连接件以便于四个车轮与机器人车架底板活动连接,驱动机器人车架底板行驶,满足机器人车架底板在室内行走需要的同时,也使得机器人车架底板具有越障功能,提高了机器人车架底板的工作效率,也便于学生理解机械结构。技术研发人员:刘希超受保护的技术使用者:河北阿凡达机器人创新科技有限公司技术研发日:20230918技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240618/35364.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表