转移机构及阵列焊机的制作方法
- 国知局
- 2024-07-17 13:08:04
本技术涉及光伏电池,尤其涉及一种转移机构及阵列焊机。
背景技术:
1、太阳能电池组件是太阳能光伏系统中的核心部件,其作用是将太阳的光能转化为电能后,输出直流电存入蓄电池中。即在光照条件下,太阳能电池组件产生一定的电动势,通过组件的串并联形成太阳能电池方阵,使得方阵电压达到系统输入电压的要求。再通过充放电控制器对蓄电池进行充电,将由光能转换而来的电能贮存起来。
2、太阳能电池组件一般通过串焊设备进行生产,在生产过程中,需要将多个电池片通过镀锡铜带(即焊带)焊接成串,以实现电池片之间的串联。在焊接形成电池串之前,需要将电池片转移至焊接工位,并与焊带进行叠放。
3、相关技术中,在将电池片转移至焊接工位时,多采用三轴机械手进行转移,三轴机械手每次只能转移一片电池片,转移效率较低。
技术实现思路
1、本实用新型的第一方面提供一种转移机构,解决上述电池片换电成功率低的问题,在使用过程中,通过第一转移组件和至少一组第二转移组件交替动作以进行电池片转移,可降低单次动作所需的节拍,从而提高转移机构的转移效率。
2、本实用新型的第二方面提供一种阵列焊机。
3、本实用新型的第一方面提供一种转移机构,包括:
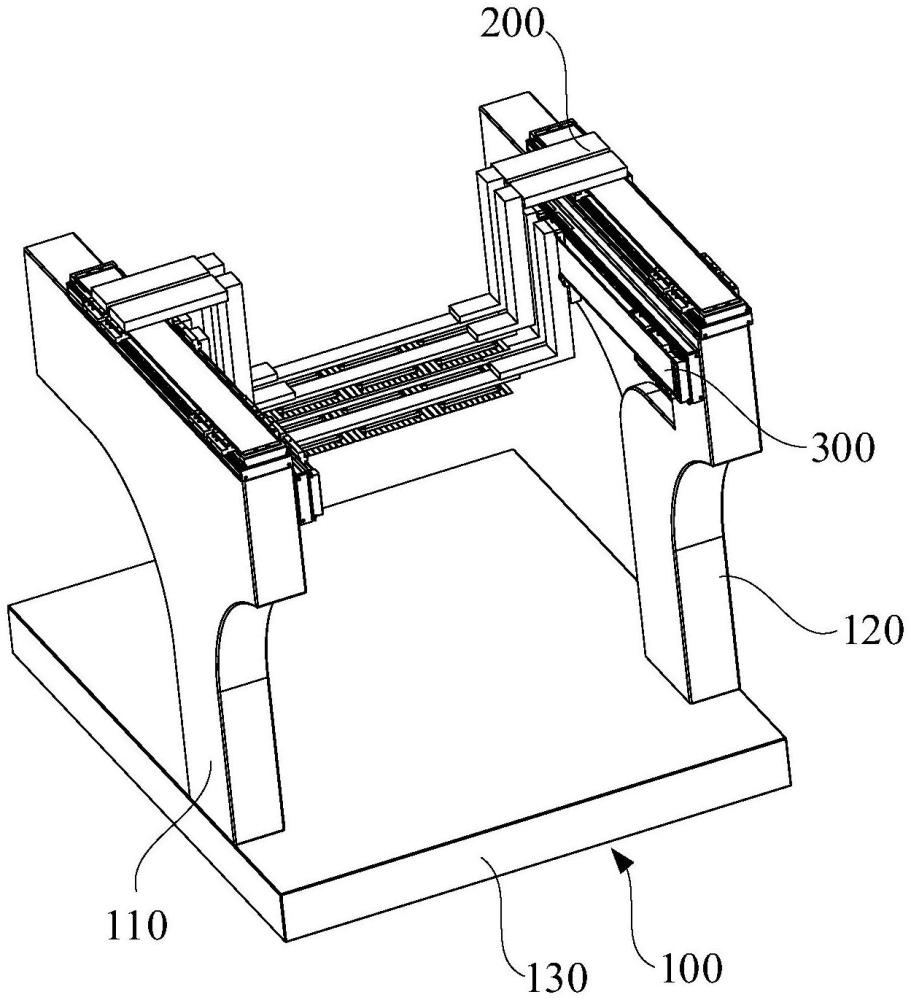
4、支撑主体,包括相对设置的第一支撑臂和第二支撑臂;
5、第一转移组件,包括第一转移部件和设于所述第一转移部件两端的第一直线模组,所述第一直线模组分别位于所述第一支撑臂和所述第二支撑臂的顶面;
6、至少一组第二转移组件,每组所述第二转移组件均包括第二转移部件和设于所述第二转移部件两端的第二直线模组,所述第二直线模组分别位于所述第一支撑臂和所述第二支撑臂相对的侧面。
7、根据本实用新型提供的一种转移机构,所述第一转移部件包括:
8、相对设置的两个第一龙门机械臂,每个所述第一龙门机械臂与相应的所述第一直线模组连接;
9、第一吸附部件,位于相对设置的两个所述第一龙门机械臂之间,并与相应的所述第一龙门机械臂固定连接。
10、根据本实用新型提供的一种转移机构,每个所述第一龙门机械臂均包括垂直设置的连接臂和第一龙门臂,所述连接臂与相应的所述第一直线模组连接;
11、所述第一吸附部件设于相对设置的两个所述第一龙门臂之间,并与相应的所述第一龙门臂固定连接。
12、根据本实用新型提供的一种转移机构,所述第一龙门臂包括:
13、线性滑台,与相应的所述第一直线模组固定连接;
14、臂体,设于所述线性滑台,适于在所述线性滑台的作用下进行升降运动,所述第一吸附部件设于所述臂体。
15、根据本实用新型提供的一种转移机构,所述第一吸附部件包括第一安装件和第一吸附单元;
16、所述第一安装件与相应的所述第一龙门机械臂固定连接;
17、所述第一吸附单元包括第一吸附载体和至少两组第一吸盘,至少两组第一吸盘阵列设于所述第一吸附载体,所述第一吸附载体与所述第一安装件固定连接。
18、根据本实用新型提供的一种转移机构,所述第二转移部件包括:
19、相对设置的两个第二龙门机械臂,每个所述第二龙门机械臂与相应的所述第二直线模组连接;
20、第二吸附部件,位于相对设置的两个所述第二龙门机械臂之间,并与相应的所述第二龙门机械臂固定连接。
21、根据本实用新型提供的一种转移机构,每个所述第二龙门机械臂均包括可升降运动的第二龙门臂,第二龙门臂连接于相应的所述直线模组,所述第二吸附部件设于相对设置的两个所述第二龙门臂之间,并与相应的所述第二龙门臂固定连接。
22、根据本实用新型提供的一种转移机构,所述第二吸附部件包括第二安装件和第二吸附单元;
23、所述第二安装件与相应的所述第二龙门机械臂固定连接;
24、所述第二吸附单元包括第二吸附载体和至少两组第二吸盘,至少两组第二吸盘阵列设于所述第二吸附载体,所述第二吸附载体与所述第二安装件固定连接。
25、根据本实用新型提供的一种转移机构,所述支撑主体还包括定位平台,所述第一支撑臂和所述第二支撑臂相对设置在所述定位平台。
26、本实用新型的第二方面提供一种阵列焊机,包括设备主体和上述任一项所述的转移机构,所述转移机构设于所述设备主体。
27、本实用新型实施例提供的转移机构,通过在第一支撑臂和第二支撑臂上设置第一转移组件和至少一组第二转移组件,在使用过程中,通过第一转移组件和至少一组第二转移组件交替动作以进行电池片转移,可降低单次动作所需的节拍,从而提高转移机构的转移效率。当转移机构应用于阵列焊机时,可提升整个阵列焊接的生产效率。
28、另外,通过将第一转移组件的第一直线模组分别位于第一支撑臂和第二支撑臂的顶面,通过将第二转移组件的第二直线模组分别位于第一支撑臂和第二支撑臂的侧面。相当于在同一支撑臂上,第一直线模组和第二直线模组的安装平面不同,这样,不仅能够防止第一转移组件和第二转移组件运动时发生干涉,而且能够从不同方向对第一直线模组和第二直线模组进行安装和拆卸,操作更加方便。
29、本实用新型提供的阵列焊机,因包括上述的转移机构,因此具备上述的所有优势。
技术特征:1.一种转移机构,其特征在于,包括:
2.根据权利要求1所述的转移机构,其特征在于,所述第一转移部件包括:
3.根据权利要求2所述的转移机构,其特征在于,每个所述第一龙门机械臂均包括垂直设置的连接臂和第一龙门臂,所述连接臂与相应的所述第一直线模组连接;
4.根据权利要求3所述的转移机构,其特征在于,所述第一龙门臂包括:
5.根据权利要求2所述的转移机构,其特征在于,所述第一吸附部件包括第一安装件和第一吸附单元;
6.根据权利要求1所述的转移机构,其特征在于,所述第二转移部件包括:
7.根据权利要求6所述的转移机构,其特征在于,每个所述第二龙门机械臂均包括可升降运动的第二龙门臂,第二龙门臂连接于相应的所述直线模组,所述第二吸附部件设于相对设置的两个所述第二龙门臂之间,并与相应的所述第二龙门臂固定连接。
8.根据权利要求7所述的转移机构,其特征在于,所述第二吸附部件包括第二安装件和第二吸附单元;
9.根据权利要求1至8任一项所述的转移机构,其特征在于,所述支撑主体还包括定位平台,所述第一支撑臂和所述第二支撑臂相对地设置于所述定位平台。
10.一种阵列焊机,其特征在于,包括设备主体和权利要求1至9任一项所述的转移机构,所述转移机构设于所述设备主体。
技术总结本技术涉及光伏电池技术领域,提供一种转移机构及阵列焊机,转移机构包括支撑主体、第一转移组件和至少一组第二转移组件,支撑主体包括相对设置的第一支撑臂和第二支撑臂;第一转移组件包括第一转移部件和设于第一转移部件两端的第一直线模组,第一直线模组分别位于第一支撑臂和第二支撑臂的顶面;每组第二转移组件均包括第二转移部件和设于第二转移部件两端的第二直线模组,第二直线模组分别位于第一支撑臂和第二支撑臂相对的侧面。本技术在使用过程中,通过第一转移组件和至少一组第二转移组件交替动作以进行电池片转移,可降低单次动作所需的节拍,以提高转移机构的转移效率。其应用于阵列焊机时,可提升整个阵列焊接的生产效率。技术研发人员:吴淼哲,曹平,黄德受保护的技术使用者:株洲三一硅能技术有限公司技术研发日:20231130技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240716/108257.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表