一种TBM隧道施工有轨运输设备防碰撞装置及其工作方法与流程
- 国知局
- 2024-08-01 08:34:08
本发明属于防碰撞装置,具体涉及一种tbm隧道施工有轨运输设备防碰撞装置及其工作方法。
背景技术:
1、tbm是隧道掘进机,它分为敞开式隧道掘进机和广义盾构机。掘进、支护、出渣等施工工序并行连续作业,是机、电、液、光、气等系统集成的工厂化流水线隧道施工装备,具有掘进速度快、利于环保、综合效益高等优点,可实现传统钻爆法难以实现的复杂地理地貌深埋长隧洞的施工,在中国铁道、水电、交通、矿山、市政等隧洞工程中应用正在迅猛增长。
2、隧道是埋置于地层内的工程建筑物,是人类利用地下空间的一种形式。隧道可分为交通隧道、水工隧道、市政隧道、矿山隧道、军事隧道等。
3、在进行tbm为主的隧道掘进时,需要使用到预制弧形水泥块对隧道进行辅助支撑,而对于弧形水泥块的运输采用有轨运输作业,有轨运输作业过程中,有轨运输设备因对弧形水泥块的运输属于重型结构件,使得运输过程中制动距离长,而隧道并非全程笔直,致使局部隧道弯曲,使得以激光测距原理制造的防碰撞装置发出的激光被隧道内壁阻挡,无法有轨运输设备与同向前方运输设备进行实时测距,导致有轨运输设备不能提前进行制动减速,无法防止有轨运输设备之间的碰撞产生,为此我们提出一种tbm隧道施工有轨运输设备防碰撞装置及其工作方法。
技术实现思路
1、本发明的目的在于提供一种tbm隧道施工有轨运输设备防碰撞装置及其工作方法,旨在解决由于隧道本身具有弯曲度,致使以激光测距原理制造的防碰撞装置发出的激光被隧道内壁阻挡,无法有轨运输设备与同向前方运输设备进行实时测距,导致有轨运输设备不能提前进行制动减速,无法防止有轨运输设备之间的碰撞产生。
2、为实现上述目的,本发明提供如下技术方案:
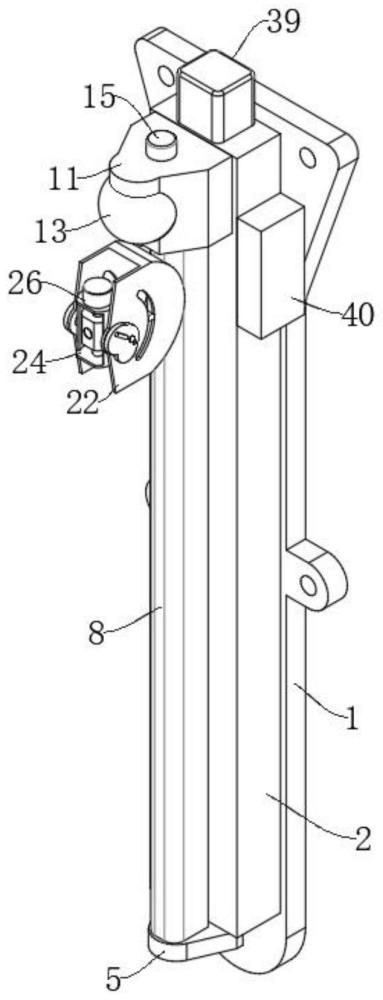
3、一种tbm隧道施工有轨运输设备防碰撞装置,包括安装板;
4、摄像架,所述摄像架设置于安装板的一侧,所述摄像架的侧端开设有安装槽,所述安装槽与摄像架内壁相连通,所述安装槽内转动连接有玻璃罩,所述玻璃罩内设置有摄像头,所述摄像头与摄像架内壁相连接,所述摄像架的内壁之间设置有清洗机构,用以对玻璃罩表面进行除尘;
5、激光测距仪,所述激光测距仪设置于安装板的一侧,所述激光测距仪外套设有摆动架;
6、调节机构,所述调节机构设置于安装板和摆动架之间,所述调节机构与摄像架、激光测距仪相连接,用以对激光测距仪进行移动。
7、作为本发明一种优选的方案,所述调节机构包括升降组件、驱动组件、限位组件和摆动组件,所述升降组件设置于安装板和摆动架之间,所述升降组件与摄像架相连接,所述摆动组件设置于摆动架内,所述摆动组件与激光测距仪相连接,所述驱动组件设置于摆动架的侧端,所述驱动组件与摆动组件相连接,所述限位组件设置于摆动架的侧端,所述限位组件与摆动组件相连接。
8、作为本发明一种优选的方案,所述升降组件包括升降盒、限位槽、丝杆、延伸杆、限位块、滑轨、伸缩杆、引导块、滑块和第四电机,所述升降盒固定连接于安装板的侧端,所述限位槽设置有两个,两个所述限位槽开设于升降盒的内壁上,所述丝杆转动连接于升降盒的内壁之间,所述第四电机固定连接于升降盒的顶部,所述第四电机的输出端与丝杆相连接,所述滑块套设于丝杆的圆周表面,所述限位块设置有两个,两个所述限位块滑动于两个限位槽的内壁之间,两个所述限位块均与滑块相连接,所述延伸杆固定活动插设于升降盒的底部,所述延伸杆的顶部延伸至升降盒内,且所述延伸杆的延伸端与滑块相连接,所述滑轨固定连接于升降盒的侧端,所述伸缩杆套设于滑轨的表面,所述伸缩杆与摆动架固定连接,所述引导块滑动于滑轨的内壁之间,所述引导块与伸缩杆相连接。
9、作为本发明一种优选的方案,所述摆动组件包括摆动槽、摆动框、转动架、第二电机、刷块和摆动杆,所述摆动框套设于激光测距仪的圆周表面,且所述摆动框通过转轴转动连接于摆动架的内壁之间,所述摆动框两侧的转轴均延伸至摆动架的两个侧端,所述转动架转动连接于摆动框的内壁之间,且所述转动架与激光测距仪相连接,所述第二电机固定连接于摆动框的顶部,所述第二电机的输出端延伸至摆动框内,且所述第二电机的输出端与转动架相连接,所述摆动槽设置有两个,两个所述摆动槽开设于摆动架的两个侧端,所述摆动杆固定连接于摆动框的侧端,且所述摆动杆滑动于两个摆动槽内,所述刷块固定连接于摆动框的内壁之间。
10、作为本发明一种优选的方案,所述驱动组件包括齿轮罩、第三电机、第三主动齿轮和第三从动齿轮,所述齿轮罩固定连接于摆动架的侧端,所述第三从动齿轮设置于齿轮罩内,所述第三从动齿轮与一个转轴固定连接,所述第三主动齿轮设置于齿轮罩的内壁之间,所述第三主动齿轮与第三从动齿轮相啮合,所述第三电机固定连接于齿轮罩的侧端,所述第三电机的输出端延至齿轮罩内,且所述第三电机的输出端与第三主动齿轮相连接。
11、作为本发明一种优选的方案,所述限位组件包括棘轮罩、棘轮、棘爪、弧形槽和第二电动推杆,所述棘轮罩固定连接于摆动架侧端,所述棘轮设置于棘轮罩内,所述棘轮与另一个转轴相连接,所述棘爪转动连接于摆动架的侧端,且所述棘爪与棘轮相啮合,所述弧形槽开设于棘轮罩的侧端,所述第二电动推杆固定连接于棘轮罩的侧端,所述第二电动推杆的输出端滑动于弧形槽内,且所述第二电动推杆的输出端与棘爪转动连接。
12、作为本发明一种优选的方案,所述清洗机构包括第一电机、第一主动齿轮、第一从动齿轮、除尘套、直线槽、静电除尘刷和第一电动推杆,所述第一从动齿轮转动连接于摄像架的内壁之间,所述第一从动齿轮与玻璃罩相连接,所述第一主动齿轮设置于摄像架内壁之间,所述第一电机固定连接于摄像架的顶部,所述第一电机的输出端延伸至摄像架内,且所述第一电机的输出端与第一主动齿轮相连接,所述除尘套固定连接于摄像架的内壁上,且所述除尘套与安装槽相连通,所述静电除尘刷转动连接于除尘套的内壁之间,所述直线槽开设于除尘套的侧端,所述第一电动推杆固定连接于除尘套的侧端,所述第一电动推杆的输出端滑动于除尘套的内壁之间,所述第一电动推杆的输出端与静电除尘刷转动连接。
13、作为本发明一种优选的方案,所述升降盒的侧端安装固定有运行终端。
14、作为本发明一种优选的方案,所述安装板的侧端开设有多个螺栓孔。
15、一种tbm隧道施工有轨运输设备防碰撞装置的使用方法,包括如下步骤:
16、s1、安装:
17、通过螺栓将本装置安装于,同向运行处于同一轨道的两辆有轨运输设备中的后辆有轨运输设备上,使得激光测距仪可对两辆有轨运输设备之间的距离进行实时测距,完成对tbm隧道施工有轨运输设备防碰撞装置的安装;
18、s2、触发程序:
19、两辆有轨运输设备在同一隧道内进行移动时,摄像头对前车定时30秒进行依一次拍摄照片,多张照片按时间轴进行排列,当两辆有轨运输设备遇到转弯、下坡和爬升时,拍摄的照片显示激光测距仪发射激光点不在前方有轨运输设备的标准圆圈范围内时,无法实时测量两辆有轨运输设备之间的距离,保持两辆有轨运输设备之间的安全距离时,触发运行终端内对激光测距仪的调节程序,实现触发程序;
20、s3、高度校准:
21、当遇到下坡和爬升小于35度时,运行终端启动第四电机,第四电机的输出端带动丝杆进行旋转,丝杆通过与滑块的滑动配合带动滑块进行移动,滑块带动延伸杆进行升降,延伸杆带动伸缩杆进行升降,伸缩杆带动摆动架进行升降,摆动架通过摆动组件带动激光测距仪进行升降,使得激光测距仪进行升降,使得激光测距仪的激光照射至前方的有轨运输设备上,方便调节激光测距仪发射的激光,使得激光测距仪发射的激光点上下移动均处于标准圆圈范围内,实现对激光测距仪的高度校准;
22、s4、上下摆动:
23、当遇到下坡和爬升遇到的坡度大于35度后,运行终端通电启动在第三电机,第三电机带动第三主动齿轮进行旋转,的啮合带动第三从动齿轮进行旋转,第三从动齿轮带动摆动框进行旋转,摆动框带动转动架摆动,继而对激光测距仪进行摆动,同时在摆动框的摆动过程中,两个摆动槽和摆动杆滑动配合对摆动框的摆动进行极限摆动角度的锁死,在摆动框摆动至需要的角度时,第二电动推杆推动棘爪靠近棘轮,棘爪与棘轮啮合对摆动框的摆动锁死,而需要对摆动框摆动时,第二电动推杆拉动棘爪移动,解除对棘爪的锁死,采用大幅度摆动,使得激光测距仪发射的激光点上下移动均处于标准圆圈范围内,实现对激光测距仪的上下摆动;
24、s5、左右微调:
25、当遇到转弯时,激光测距仪发射激光点不在前方有轨运输设备的标准圆圈范围内,启动第二电机,第二电机的输出端带动转动架进行旋转,转动架带动激光测距仪进行微角度旋转,使得激光测距仪打出的激光点左右移动,保证激光点处于标准圆圈范围内,实现对激光测距仪的左右微调;
26、s6、清除灰尘:
27、隧道内灰尘极易附着于玻璃罩表面及激光测距仪镜头上,当玻璃罩的表面附着有灰尘,而摄像头拍摄的画面模糊时,启动第一电机,第一电机的输出端带动第一主动齿轮进行旋转,第一主动齿轮带动玻璃罩进行旋转,静电除尘刷通电产生静电,第一电动推杆通电启动,第二电机的输出端推动除尘套靠近旋转中玻璃罩,对玻璃罩表面的静电除尘,刷出的灰尘从除尘套的底部排出,当激光测距仪发射的激光模糊时,启动第二电机,第二电机的输出端带动转动架进行旋转,转动架带动激光测距仪与刷块相接触,刷块对激光测距仪的镜头进行刷除灰尘,实现对激光测距仪和玻璃罩的清除灰尘。
28、与现有技术相比,本发明的有益效果是:
29、1、本方案中,通过调节机构中的升降组件、驱动组件、限位组件和摆动组件对激光测距仪进行移动,使得两辆有轨运输设备遇到转弯、下坡和爬升时,当遇到下坡和爬升小于35度时,通过升降组件对激光测距仪进行高度校准,使得激光测距仪发射的激光点上下移动均处于标准圆圈范围内,当遇到下坡和爬升遇到的坡度大于35度后,通过驱动组件、摆动组件和限位组件对激光测距仪进行大幅度摆动,使得激光测距仪发射的激光点上下移动均处于标准圆圈范围内,当遇到转弯时,通过第二电机对激光测距仪的左右微调,使得激光测距仪打出的激光点左右移动均处标准圆圈范围内,便于激光测距仪发射的激光能准确追踪前方的有轨运输设备,实现防碰撞装置与同向前方运输设备进行实时测距,实现有轨运输设备提前进行制动减速,防止有轨运输设备之间的碰撞产生。
30、2、本方案中,隧道内灰尘极易附着于玻璃罩表面及激光测距仪镜头上,当玻璃罩的表面附着有灰尘,而摄像头拍摄的画面模糊时,启动第一电机,第一电机的输出端带动第一主动齿轮进行旋转,第一主动齿轮带动玻璃罩进行旋转,静电除尘刷通电产生静电,第一电动推杆通电启动,第二电机的输出端推动除尘套靠近旋转中玻璃罩,对玻璃罩表面的静电除尘,刷出的灰尘从除尘套的底部排出,当激光测距仪发射的激光模糊时,启动第二电机,第二电机的输出端带动转动架进行旋转,转动架带动激光测距仪与刷块相接触,刷块对激光测距仪的镜头进行刷除灰尘,实现对激光测距仪和玻璃罩的清除灰尘,避免灰尘对玻璃罩表面及激光测距仪镜头附着,提高摄像头拍摄的画面和激光测距仪发射激光的清晰度,降低因灰尘干扰的装置失灵可能性,避免因灰尘干扰的碰撞发生。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232349.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。