一种基于潮流计算的高速列车多车协同节能优化方法
- 国知局
- 2024-08-01 08:34:04
本发明涉及列车协同控制领域,尤其涉及一种基于潮流计算的高速列车多车协同节能优化方法。
背景技术:
1、高速列车系统通常由多个车辆组成,每个车辆都依赖于电力系统进行牵引和供电。在列车行驶过程中,不同车辆之间的能源存在相互利用,这是因为某一辆列车在进行电制动时将会产生能量反馈回接触网,供其他列车使用或被制动电阻消耗转化为热能。
2、现阶段在高速列车领域的节能优化策略无论是单车优化还是多车优化都是从机械能的层面进行考虑,忽略了列车正常供电时的接触网损耗以及列车再生制动能量在两车之间传输时在接触网上的损耗。
技术实现思路
1、本发明提出一种基于潮流计算的高速列车多车协同节能优化方法,解决上述问题。
2、本技术公开了一种基于潮流计算的高速列车多车协同节能优化方法,包括以下步骤:
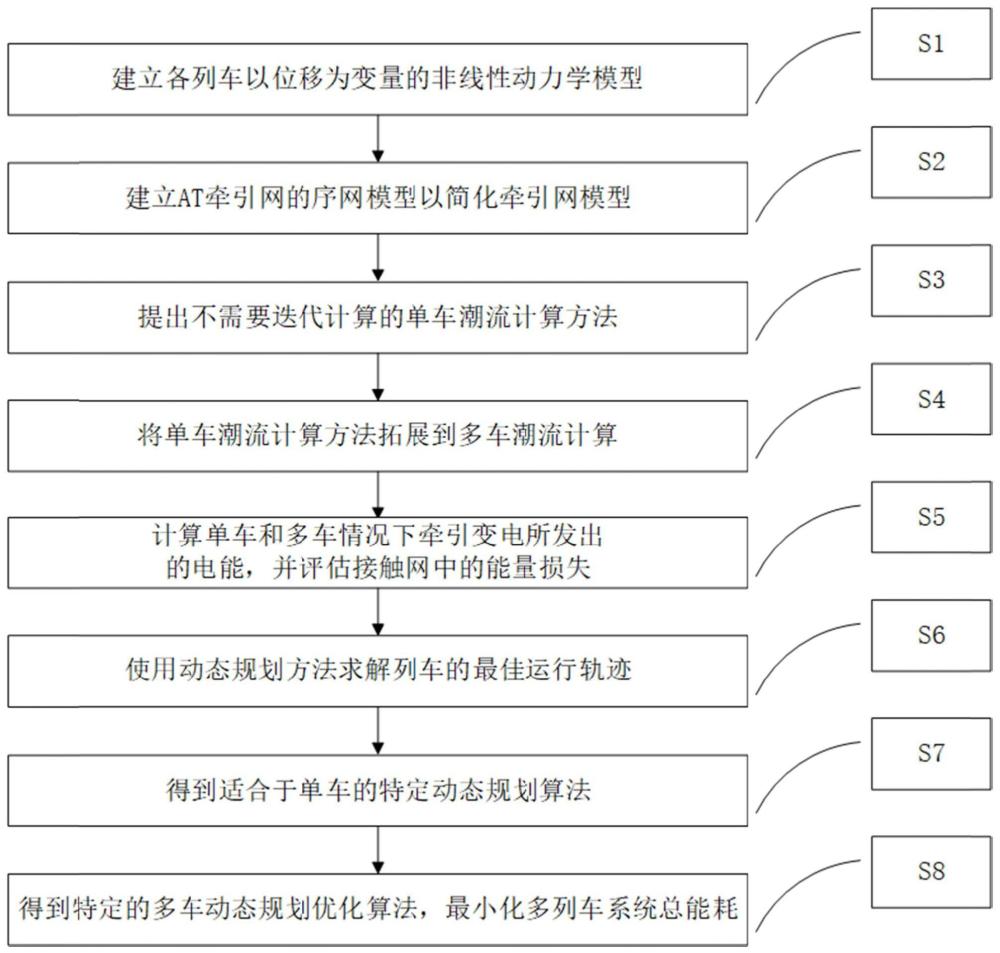
3、s1、建立各列车以位移为变量的非线性动力学模型,并计算列车接触网侧的有功功率和无功功率;
4、s2、建立at牵引网的序网模型以简化牵引网模型,并得到牵引供电网络的等效阻抗;
5、s3、提出不需要迭代计算的单车潮流计算方法;
6、s4、将单车潮流计算方法拓展到多车潮流计算;
7、s5、计算单车和多车情况下牵引变电所发出的电能,并评估接触网中的能量损失;
8、s6、使用动态规划方法求解列车的最佳运行轨迹;
9、s7、基于单车潮流计算,得到适合于单车的特定动态规划算法;
10、s8、基于多车潮流计算,得到特定的多车动态规划优化算法,最小化多列车系统的总能耗。
11、优选的,所述s1中的非线性动力学模型为:
12、
13、式中,x为列车运行位移,v为列车运行速度,亡为运行时间,m为列车的总质量,γ为旋转质量系数,pt为列车的最大牵引力,fb为列车的最大制动力,μt为牵引控制系数,μb为制动控制系数;
14、fbor(v)为列车的基本运行阻力,由戴维斯方程fbor(v)=mg(a+bv+cv2)计算得到,其中a、b和c为戴维斯方程系数;
15、far(x)表示列车运行过程中的附加阻力,用方程表示,其中θ为线路的坡度,用千分数表示;ls为线路隧道的长度;c0为线路的曲线半径;
16、列车接触网侧的有功功率计算公式为:
17、
18、式中,pt(v)为列车轮周处的机械功率,ηt、ηc、ηm和ηg分别表示车辆变压器、变流器、牵引电机和齿轮箱的功率传输效率,paux是辅助绕组的额定功率;pt大于或等于0表示牵引和惯惰性工况,而pt小于0表示再生制动工况;
19、列车接触网侧无功功率计算公式为:
20、qnet=pnet×tan(cos(pnet));
21、式中,pnet为列车接触网侧有功功率,cos(pnet)为动态功率因数。
22、优选的,所述s2的过程为:
23、通过阻抗合并,将高速铁路的牵引网络简化为一个包含t1、t2、f1、f2、y,5根导线的传输线模型,其中y由上、下行的轨道、接地线和保护线合并而成,并采用坐标变换将参考点从地面转移到导线y上,模型公式如下:
24、
25、式中,δu′t1,δu′f1,δu′t2,δu′f2,δu′y分别为坐标变换后t1、t2、f1、f2、y这五根导线的单位长度电压降;δut1,δuf1,δut2,δuf2,δuy分别为坐标变换前t1、t2、f1、f2、y这五根导线的单位长度电压降;
26、牵引供电网络的等效阻抗计算公式为:
27、
28、式中,l表示at段内的牵引负载位置,x1表示牵引负载与供电装置的前端之间的距离,d表示at的长度,z0、z1、z2、z3分别为0序、1序、2序、3序阻抗参数;zat代表at所的泄露阻抗;
29、优选的,所述s3构建单车潮流计算的方法为:
30、根据等效电路模型,列车接触网端电压为:
31、
32、式中,为列车接触网端的电压、为变电所的理想电压源、为流经列车的电流、zx为变电所戴维南等效电路中的等效阻抗;
33、从电能角度计算得到列车接触网端的复功率为:
34、
35、式中,j代表虚数、为电流的共轭复数;
36、电流的计算公式为:
37、
38、令z=zeq+zx=r+jx,得到单车潮流计算模型为:
39、
40、式中,i1re为电流的实部,i1im为电流的虚部;r为阻抗z的电阻、x为阻抗z的电抗;u0re为电压的实部,u0im为电压的虚部;
41、当牵引网络中没有列车负载,即pnet=qnet=0时,若则是真实解。
42、优选的,所述s4中多车潮流计算方法为:
43、两列列车的接触网电压之间的耦合关系为:
44、
45、式中,和分别表示两列列车的接触网电压,zeq1、zeq2分别为两列车的线路阻抗,分别为流经两列列车的电流,z11、z12、z21、z22为对应矩阵中的项;
46、设第i辆列车的复功率为pi+jqi(i=1,2),得到电流的表达式为:
47、
48、式中,pi为第i辆列车的有功功率、qi为第i辆列车的无功功率、为第i辆列车接触网端的电压;
49、根据两辆列车接触网电压之间的耦合关系和电流的公式,写成实数形式为:
50、
51、式中,i=1,2且j1=1,2,但i≠j1;uire为ui的实部,uiim为ui的虚部;u0re为u0的实部,u0im为u0的虚部;为的实部,为的虚部;rii为z11或z22的实部,xii为z11或z22的虚部,为z12或z21的实部,为z12或z21的虚部;
52、采用牛顿法进行迭代求解,求解步骤为:
53、s41、设置列车接触网端电压的初始值,
54、即u=[u1re u1im u2re u2im]t=[27500 0 27500 0]t;
55、s42、计算雅可比矩阵j:
56、
57、式中,a=2i-1,b=2j2-1,c=2j2,d=2i;如果i=j2,则k=1,否则k=0;
58、s43、将列车牵引网络的电压值代入四元二次方程组的左侧,得到残差b:
59、
60、s44、根据jv1=b,计算列车架空接触系统电压的修正值v1;
61、s45、判断收敛性:如果v1的范数小于给定值,则获得最终解;否则,设定u=u-v1,并返回到s42,直到满足条件;
62、经过以上步骤,得到两列列车的接触网电压,根据进入列车的复杂功率计算出多车等效电路的分支电流,完成动态潮流计算。
63、优选的,所述s5包括以下步骤:
64、单列车的潮流计算模型中,单列车运行期间消耗的电能jsub1和在接触网上损失的能量jloss1的计算公式如下:
65、
66、
67、式中,t0是列车的初始出发时刻,t是总运行时间;r1是线路阻抗的实部电阻,rx是牵引变电站等效阻抗的实部电阻;
68、多列车潮流计算模型中,牵引变电站发出的电能jsub2以及线路阻抗消耗的能量jloss2的计算公式如下:
69、
70、
71、式中,td为两列车的发车间隔,t1和t2分别为两列车在相邻车站的总运行时间,r1和r2分别为两列列车在各自位置的线路电阻。
72、优选的,所述s6包括以下步骤:
73、s61、阶段划分:列车运行的整个过程在空间域内离散化,将列车的整个运行位移以δs等间距划分为n段,其中划分后的每段被视为动态规划解决模型中的阶段,并由一系列离散位置点{s1,s2,...,sn+1,}组成,构成了每个阶段的起始和结束位置的集合;
74、s62、确定状态:以δv作为离散距离,得到位置点n处的离散速度集合{vn,1,vn,2,...,vn,m(k)},速度集合是阶段n的输入状态集合,也是阶段n-1的输出状态集合;
75、s63、建立状态转移方程:从第n阶段的状态到第n+1阶段的状态的状态转移方程可以表示为:
76、
77、s64、状态转移成本函数:将节能驾驶的优化目标定义为最小化能量一时间代价,行驶时间的约束被转化为惩罚函数以确保准点要求:
78、jn(i3,j4)=en(i3,j4)+λδtn;
79、s65、搜索空间缩减:根据特定问题减小搜索空间,即通过约束确定下一阶段的最大搜索空间,并判断状态转移过程中是否存在有效的速度连接;所述约束包括速度、舒适性以及列车达到下一阶段所需的最大功率约束;速度限制要求第n阶段列车的速度必须小于该阶段最大速度曲线的速度vn,max;舒适度由列车加速度变化率表示,变化率越大,舒适性越差;最大牵引力约束要求状态转移期间产生的力在最大制动力和最大牵引力之间。
80、优选的,所述s7适合于单车的特定动态规划算法包括以下步骤:
81、
82、式中,en(i,j)为从到的能耗;分别为动态规划算法中第n阶段搜索的第i1个速度和n+1阶段搜索的第j3个速度;sn为列车当前所处的位置。
83、两个状态之间的运行时间为:
84、
85、列车此时所提供的牵引/制动力的计算公式为:
86、
87、将得到的牵引/制动力乘以列车此时的速度得到该状态下列车的接触网端5的复功率,再应用单车潮流计算方法求解出此状态下的单车潮流分布,即可得到流经列车的电流
88、两种状态之间的能量消耗为:
89、en(i,j)=(u0rei1re+u0imi1im)·δtn(i,j)·ξn;
90、
91、式中,参数ξn用于确定牵引变电站是否向列车供电。
92、优选的,所述s8包括以下步骤:
93、通过时间插值获得恒定速度列车的状态:
94、
95、
96、通过确定时两列车的状态,计算多列车的动态潮流分布;
97、在多车优化模型中,两种状态的能源转换成本为:
98、en(i,j)=[u0re(i1re+i2re)+u0im(i1im+i2im)]·δtn(i,j)·ζn;
99、
100、当变电站供电功率小于0时,参数ζn值为-1,此时传输过来的再生制动能量全部被利用,浪费的再生制动能量最低。
101、本发明的有益效果:
102、1.减少电能损失:通过优化列车的速度曲线,本发明有助于减少接触网和牵引供电系统中的电能损失。
103、2.缩减优化时间:结合多列车协同优化和动态规划技术,可以显著缩短优化计算时间,使得电能优化过程更为实用和可行,特别是在需要快速做出决策的情况下。
104、3.提高列车运行稳定性:优化的速度曲线有助于减少列车在运行过程中的速度波动,提高了列车的运行稳定性和乘客的舒适性。
本文地址:https://www.jishuxx.com/zhuanli/20240718/232338.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表