一种列车自动驾驶牵引控制系统的制作方法
- 国知局
- 2024-08-01 08:44:09
本发明涉及列车自动驾驶,尤其涉及列车自动驾驶的牵引控制。
背景技术:
1、高铁领域,我国已经完成基于动车组运行的列车自动驾驶(ato)系统研发,并在部分高铁线路投入应用。高铁领域的ato系统牵引控制技术,主要是与基于微机网络控制(tcms)的大功率和谐型号机车配套使用,tcms接口模块实现ato系统与机车控制系统间数据双向交互,使得ato系统能够获取tcms列车运行关键信息,并向机车控制系统发送牵引控制指令。
2、然而,货运列车自动驾驶技术发展相对缓慢,牵引货运列车的大部分是内燃机车和传统电力机车,这两种机车没有微机网络控制系统,其依靠自身的牵引控制电路将司控器的操纵转换成对机车的牵引控制信号。要在内燃机车和传统电力机车上实现自动驾驶,首先要解决ato系统与机车自身的牵引控制电路的接口问题。目前尚未见与内燃机车和传统电力机车的牵引控制电路进行接口的相关技术,未见内燃机车和传统电力机车的自动驾驶牵引控制技术。
技术实现思路
1、本发明的目的是提供一种适用于内燃机车和传统电力机车的具有高安全可靠性的自动驾驶牵引控制系统和控制方法。
2、为实现上述目的,本发明采用的技术方案如下:
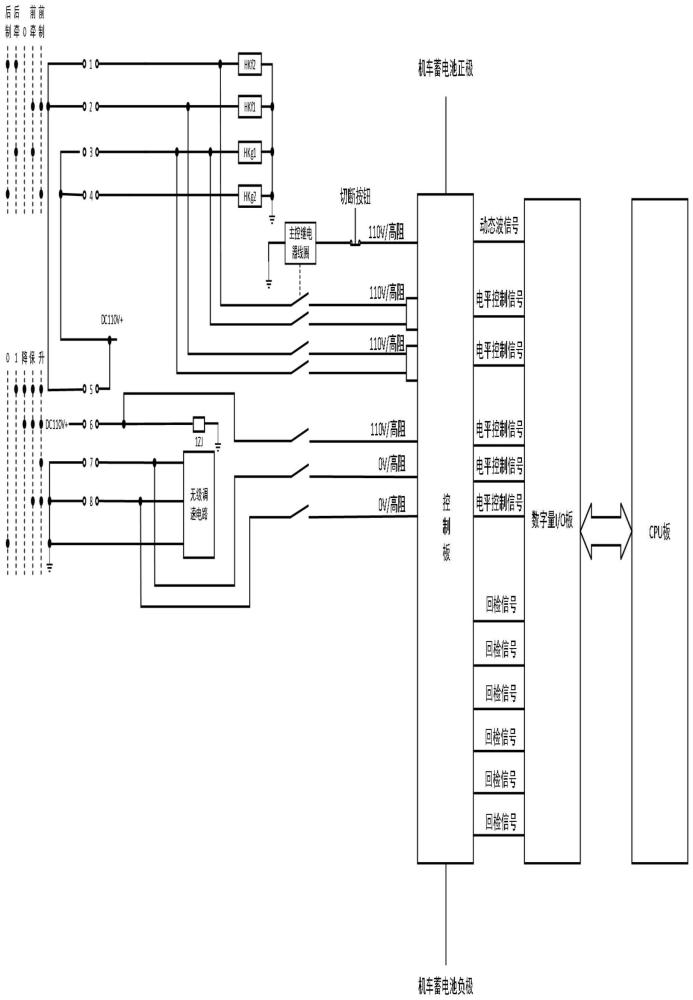
3、一种列车自动驾驶牵引控制系统,包括自动驾驶控制主机以及机车固有的牵引控制电路;所述牵引控制电路包括控制触点;所述自动驾驶控制主机包括cpu板、数字量i/o板和控制板,所述cpu板控制所述数字量i/o板输出电平控制信号,所述控制板将所述电平控制信号转换成与所述牵引控制电路的电压等级相适应的控制信号;所述与牵引控制电路的电压等级相适应的控制信号的输出线路与所述控制触点所在线路直接并接,所述与牵引控制电路的电压等级相适应的控制信号被直接施加到与所述控制触点串接的线路上。
4、进一步地,所述列车自动驾驶牵引控制系统还包括主控继电器;所述cpu板还控制所述数字量i/o板输出动态波信号,所述控制板将所述动态波信号转换成所述主控继电器的线圈的励磁信号;所述主控继电器的常开触点串接在所述与牵引控制电路的电压等级相适应的控制信号的输出线路上,用于导通或切断所述与牵引控制电路的电压等级相适应的控制信号。
5、进一步地,所述控制板还能够检测其内部的继电器状态,并发送回检信号至所述数字量i/o板;所述数字量i/o板将所述回检信号预处理后发送给cpu板,所述cpu板通过比对所述回检信号与所述电平控制信号或动态波信号,能够判断控制板内部的继电器是否发生故障。
6、具体地,所述控制板具备第一、第二、第三、第四类型的继电器常开触点输出回路,其中:第一类型的继电器常开触点输出回路的每两路由同一个2a2b继电器的两个常开触点控制,该两路输出回路输出的控制信号分别作为自动驾驶时的方向控制与工况控制;第四类型的继电器常开触点输出回路包括动态方波转负电源电路,该动态方波转负电源电路借助方波的高低变换使电源电压的能量通过电容转移到该电路的输出端,并在该电路的输出端形成负电源,以驱动所述第四类型的继电器常开触点输出回路中的继电器线圈。
7、进一步地,所述列车自动驾驶牵引控制系统还包括用于强制隔离的紧急控制器。
8、一种列车自动驾驶牵引控制方法,所述控制方法包括:自动驾驶控制主机输出与机车固有的牵引控制电路的电压等级相适应的控制信号,将所述与牵引控制电路的电压等级相适应的控制信号的输出线路与所述牵引控制电路中的控制触点所在线路直接并接,将所述与牵引控制电路的电压等级相适应的控制信号直接施加到与所述控制触点串接的线路上;所述自动驾驶控制主机通过控制施加到与所述控制触点串接的线路上的电压信号组合,从而控制机车的运行方向、运行工况以及柴油机转速;设置主控继电器,将所述主控继电器的常开触点串接在所述与牵引控制电路的电压等级相适应的控制信号的输出线路上;所述自动驾驶控制主机检测其内部的数字电路硬件失效、程序异常以及继电器故障;当所述自动驾驶控制主机正常工作时,其输出励磁信号给所述主控继电器的线圈,从而主控继电器的常开触点闭合,自动驾驶控制主机能够向所述牵引控制电路提供控制信号;当所述自动驾驶控制主机出现故障时,其不提供励磁信号给所述主控继电器的线圈,从而主控继电器的常开触点保持断开,切断自动驾驶控制主机输出的控制信号。
9、本发明的技术优势如下:(1)本发明将数字电路输出的电压信号变换为与机车固有的牵引控制电路的电压等级相适应的控制信号,并且将该控制信号的输出线路与所述牵引控制电路中的控制触点所在线路直接并接,从而使该控制信号能够直接施加到与所述控制触点串接的线路上,实现了自动驾驶设备与机车牵引控制电路的接口,且不需要对机车固有的牵引控制电路做任何改造,简单、安全且不影响人工驾驶操作。(2)本发明的主控继电器以及用于强制隔离的紧急控制器能够在自动驾驶控制主机出现故障或司机发现安全隐患时,及时切断自动驾驶控制主机输出的控制信号,符合故障-安全原则。(3)本发明设计的动态方波转负电源电路能够在数字电路出现硬件失效或程序异常时,及时切断对主控继电器的励磁,符合故障-安全原则。(4)本发明第一类型的继电器常开触点输出回路的每两路由同一个2a2b继电器的两个常开触点控制,能够保证自动驾驶时方向控制与工况控制同时进行,避免两者不同步出现的逻辑混乱。(5)本发明的控制板具有自检功能,能检测其内部继电器的触点是否发生粘连,如果发生粘连,能够及时切断控制板输出的控制信号,符合故障-安全原则。
技术特征:1.一种列车自动驾驶牵引控制系统,包括自动驾驶控制主机以及机车固有的牵引控制电路;
2.根据权利要求1所述的列车自动驾驶牵引控制系统,其特征在于:还包括主控继电器;所述cpu板还控制所述数字量i/o板输出动态波信号,所述控制板将所述动态波信号转换成所述主控继电器的线圈的励磁信号;所述主控继电器的常开触点串接在所述与牵引控制电路的电压等级相适应的控制信号的输出线路上,用于导通或切断所述与牵引控制电路的电压等级相适应的控制信号。
3.根据权利要求1或2所述的列车自动驾驶牵引控制系统,其特征在于:所述控制板还能够检测其内部的继电器状态,并发送回检信号至所述数字量i/o板;所述数字量i/o板将所述回检信号预处理后发送给cpu板,所述cpu板通过比对所述回检信号与所述电平控制信号或动态波信号,能够判断控制板内部的继电器是否发生故障。
4.根据权利要求1所述的列车自动驾驶牵引控制系统,其特征在于:所述控制板具备第一公共端以及第一类型的继电器常开触点输出回路;该第一类型的继电器常开触点输出回路的每两路由同一个2a2b继电器的两个常开触点控制,其控制逻辑如下:当该第一类型的继电器常开触点输出回路接收的所述电平控制信号为第一电平时,所述继电器处于励磁状态,所述常开触点闭合,将所述第一公共端输入的电压信号输出作为所述与牵引控制电路的电压等级相适应的控制信号;当接收的所述电平控制信号为第二电平时,所述继电器处于非励磁状态,所述常开触点保持断开,输出高阻。
5.根据权利要求4所述的列车自动驾驶牵引控制系统,其特征在于:所述控制板还具备第二类型的继电器常开触点输出回路,该第二类型的继电器常开触点输出回路的每一路由一个继电器的一个常开触点控制,其控制逻辑与所述第一类型的继电器常开触点输出回路的控制逻辑相同。
6.根据权利要求5所述的列车自动驾驶牵引控制系统,其特征在于:所述控制板还具备第二公共端以及第三类型的继电器常开触点输出回路,该第三类型的继电器常开触点输出回路的每一路由一个继电器的一个常开触点控制,其控制逻辑如下:当该第三类型的继电器常开触点输出回路接收的所述电平控制信号为第一电平时,所述继电器处于励磁状态,所述常开触点闭合,将所述第二公共端输入的电压信号输出作为所述与牵引控制电路的电压等级相适应的控制信号;当接收的所述电平控制信号为第二电平时,所述继电器处于非励磁状态,所述常开触点保持断开,输出高阻。
7.根据权利要求2所述的列车自动驾驶牵引控制系统,其特征在于:所述控制板具备第一公共端以及第四类型的继电器常开触点输出回路,该输出回路串接所述主控继电器的线圈;该第四类型的继电器常开触点输出回路的每一路由一个继电器的一个常开触点控制,其控制逻辑如下:当该第四类型的继电器常开触点输出回路接收所述数字量i/o板输出的稳定的动态波信号时,所述继电器处于励磁状态,所述常开触点闭合,将所述第一公共端输入的电压信号输出作为所述主控继电器的线圈的励磁信号;当接收所述数字量i/o板输出的固定电平信号时,所述继电器处于非励磁状态,所述常开触点保持断开,输出高阻。
8.根据权利要求7所述的列车自动驾驶牵引控制系统,其特征在于:所述动态波信号为动态方波;所述第四类型的继电器常开触点输出回路包括动态方波转负电源电路,该动态方波转负电源电路借助方波的高低变换使电源电压的能量通过电容转移到该电路的输出端,并在该电路的输出端形成负电源,以驱动所述第四类型的继电器常开触点输出回路中的继电器线圈。
9.根据权利要求3所述的列车自动驾驶牵引控制系统,其特征在于:所述控制板中的继电器采用带强制导向结构的安全继电器;所述控制板还具备继电器状态回检电路,该回检电路包括与所述控制板中的继电器的常开触点对应的常闭触点,通过检测常闭触点的状态来反映常开触点的状态,并发送回检信号至所述数字量i/o板。
10.一种列车自动驾驶牵引控制方法,所述控制方法包括:自动驾驶控制主机输出与机车固有的牵引控制电路的电压等级相适应的控制信号,将所述与牵引控制电路的电压等级相适应的控制信号的输出线路与所述牵引控制电路中的控制触点所在线路直接并接,将所述与牵引控制电路的电压等级相适应的控制信号直接施加到与所述控制触点串接的线路上;
技术总结本发明的列车自动驾驶牵引控制系统,包括自动驾驶控制主机以及机车固有的牵引控制电路;牵引控制电路包括控制触点;自动驾驶控制主机包括CPU板、数字量I/O板和控制板,CPU板控制数字量I/O板输出电平控制信号,控制板将电平控制信号转换成与牵引控制电路的电压等级相适应的控制信号;与牵引控制电路的电压等级相适应的控制信号被直接施加到与控制触点串接的线路上。本发明的技术优势:将数字电路输出的电压信号变换为与机车固有的牵引控制电路的电压等级相适应的控制信号,实现了自动驾驶设备与机车牵引控制电路的接口,且不需要对机车固有的牵引控制电路做任何改造。技术研发人员:董华伟,丁小汀,姚锐受保护的技术使用者:北京交大思诺科技股份有限公司技术研发日:技术公布日:2024/3/21本文地址:https://www.jishuxx.com/zhuanli/20240718/233037.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表