FAO系统蠕动模式舒适性提高方法、装置、设备及介质与流程
- 国知局
- 2024-08-01 08:45:34
本发明涉及列车信号控制系统,尤其是涉及一种fao系统蠕动模式舒适性提高方法、装置、设备及介质。
背景技术:
1、城市轨道交通全自动运行(fully automatic operation,fao)无人驾驶系统中,蠕动模式是列车运营组织中的一种降级应急行车模式,这不仅能避免列车停在区间造成大面积晚点,而且也能避免区间长时停车造成的乘客焦虑或恐慌。在全自动无人驾驶系统中,当信号系统车载控制器cc与车辆列车控制管理系统tcms出现通信故障,或者是车辆内部网络出现故障时,列车会紧急制动停车并向控制中心申请进入蠕动模式运行。列车在取得中心授权后,会自动进入蠕动模式并以不超过25km/h的速度继续运行到下一站台。
2、信号系统与车辆接口实现蠕动模式控制的方案一般存在两种:一种是通过单一的或是组合的硬线接口来实现牵引/制动级位的控制,另一种是输出电流环并通过pwm编码器转换成pwm信号来实现牵引/制动级位的控制。前者是数字量的有级控制方式,后者是模拟量的无极控制方式。现有技术中,焦点无一不在信号与车辆的蠕动模式接口控制方式上,而无论选择哪一种,蠕动模式运行过程中的舒适性未得到有效关注并解决。尤其采用电流环控制方式,当列车处于牵引工况时,受限于车辆响应特性,蠕动模式运行过程中会存在突出的强烈顿挫感,乘客舒适度体验差。
3、cn114291091a公开了一种适用于汽车领域的车辆蠕动模式的控制方法,包括:s1、车辆选择蠕动模式;s2、判断车辆是否处于起步过程;s3、判断是否踩下制动踏板;s4、判断发动机的转速是否达到第二预设阈值;s5、离合器达到半结合点位置;s6、计算目标冲击度、需求扭矩及发动机的目标转速;s7、发动机调节转速和扭矩,直至车辆的速度与蠕动行驶目标车速的差值位于蠕动行车速度差范围内;s8、发动机进入恒转速控制阶段;s9、判断车辆的速度是否大于蠕动行驶最高速度;s10、判断离合器的转速与发动机的转速是否同步。该方法公开的车辆的蠕动模式的控制方法提高了车辆运动的平顺性和动力响应速度,增加了车辆移动的精确度。但是,该方法适用于汽车,且仅考虑不踩制动踏板和踩制动踏板两种控制方式,对舒适度的提升非常有限,区别于轨交领域的列车控制对象,不具备相似性和参考性。
技术实现思路
1、本发明的目的就是为了提供一种fao系统蠕动模式舒适性提高方法、装置、设备及介质,旨在解决现有技术中电流环控制方式时蠕动模式存在强烈顿挫感的问题。
2、本发明的目的可以通过以下技术方案来实现:
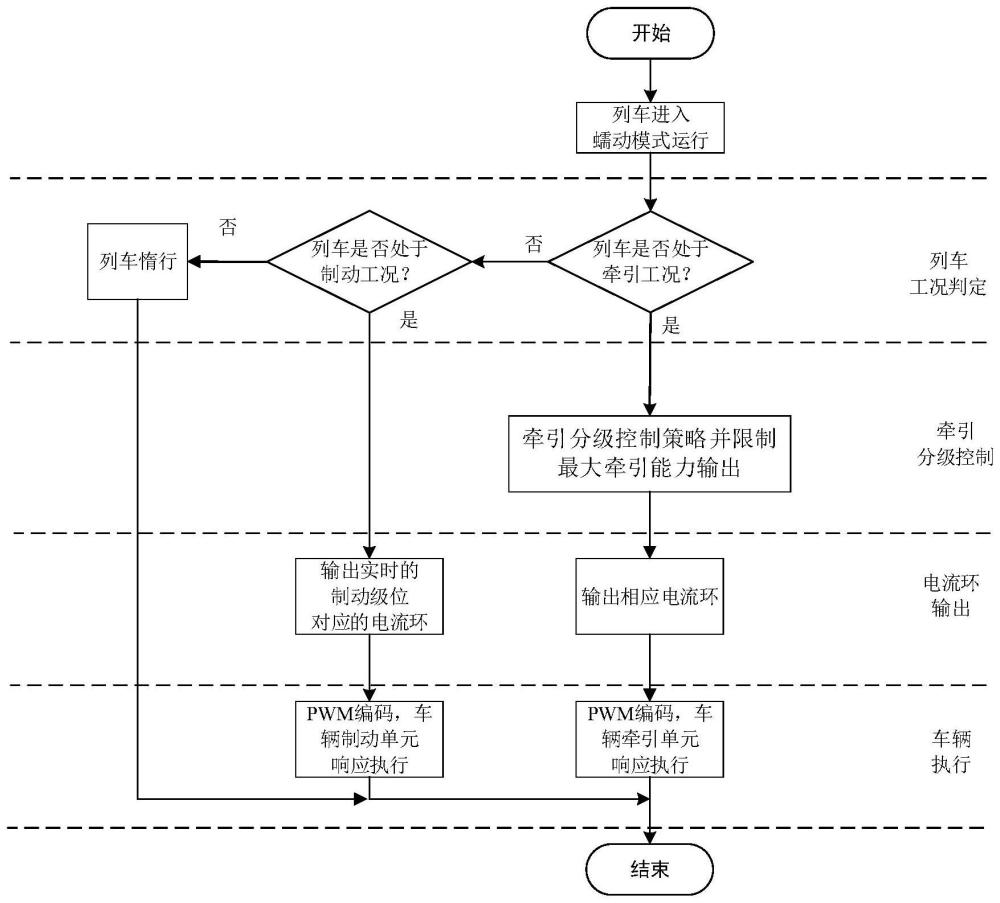
3、根据本发明的第一方面,提供了一种fao系统蠕动模式舒适性提高方法,当列车进入蠕动模式运行时,实时判断列车当前所需工况,根据所需工况的不同采取不同处理方式以提高蠕动模式舒适性。
4、作为优选的技术方案,所述的工况包括牵引工况、制动工况和惰行工况。
5、作为优选的技术方案,所述的当列车进入蠕动模式运行且需要牵引工况运行时,采用牵引分级控制策略并限制最大牵引能力输出,输出不同的电流环,继而再按照蠕动模式的电流环接口方式输出调整后的pwm编码级位信号,车辆牵引单元根据pwm编码级位信号在小幅度牵引级位范围响应执行。
6、作为优选的技术方案,所述的当列车进入蠕动模式运行且需要制动工况运行时,正常输出实时的制动级位对应的电流环,并按照蠕动模式的电流环接口方式输出pwm编码级位信号,车辆制动单元响应执行。
7、作为优选的技术方案,所述的当列车进入蠕动模式运行且需要惰行工况运行时,既不输出牵引也不输出制动,车辆惰行行驶。
8、作为优选的技术方案,所述的蠕动模式电流环接口级位传输方式为:由信号车载控制器输出预设范围的电流环级位信号到车辆pwm编码器;pwm编码器将电流环级位信号转换成pwm编码级位信号并输出到车辆的牵引或制动单元;牵引/制动单元根据列车牵引/制动/惰行指令,响应执行对应的级位信号控制列车运行。
9、作为优选的技术方案,所述的信号车载控制器输出的电流环级位信号对应的模拟量范围为0-20ma。
10、作为优选的技术方案,所述的电流环与级位的对应关系为:
11、电流小于2ma,车辆应视为无效信号,不响应任何命令;电流大于等于2ma且小于4ma,车辆应视级位为0%,响应最小级位请求;电流大于等于4ma且小于等于18ma,车辆应视级位为0%-100%,响应正常变化级位请求;电流大于18ma且小于等于19ma,车辆应视级位为100%,响应最大级位请求;电流大于19ma,车辆应视为无效信号,不响应任何命令。
12、作为优选的技术方案,所述的牵引分级控制策略具体为:在需要牵引工况时,根据信号车载控制器的期望级位将牵引级位划分为若干个分层递阶等级,每一个等级对应一个固定的电流环。
13、作为优选的技术方案,所述的牵引级位的等级划分根据每条线路顿挫感的强烈情况分别确定。
14、作为优选的技术方案,所述的限制最大牵引能力输出具体为:主动限制信号车载控制器的最大输出牵引值,将输出的级位需求控制在一定幅度内调整。
15、作为优选的技术方案,所述的最大牵引能力的限制值视具体情况而定。
16、作为优选的技术方案,所述的限制最大牵引能力输出的分级控制策略使得蠕动模式的运行速度恒定在20km/h且不超过25km/h,且到站后能精确对标停车。
17、根据本发明的第二方面,提供了一种fao系统蠕动模式舒适性提高装置,包括:
18、工况判断模块,用于在列车进入蠕动模式运行时,实时判断列车当前所需工况;
19、控制模块,用于根据工况判断模块的判断结果,区分不同工况采取不同处理方式以提高蠕动模式舒适性。
20、根据本发明的第三方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。
21、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。
22、与现有技术相比,本发明具有以下有益效果:
23、(1)本发明对于采用电流环接口方式的蠕动模式,不仅能保证蠕动模式运行速度要求和精确停车要求,而且能有效解决运行过程中强烈的顿挫感,极大提高乘客舒适性;
24、(2)本发明提供的牵引分级控制策略,具有通用性、灵活性特点,适用于各个城市的不同全自动运行线路,同样适用于各个车辆制造厂商的不同特性;
25、(3)本发明提供的方法对于采用非电流环接口方式的蠕动控制也存在适用性,具有借鉴参考性。
技术特征:1.一种fao系统蠕动模式舒适性提高方法,其特征在于,当列车进入蠕动模式运行时,实时判断列车当前所需工况,根据所需工况的不同采取不同处理方式以提高蠕动模式舒适性。
2.根据权利要求1所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的工况包括牵引工况、制动工况和惰行工况。
3.根据权利要求2所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的当列车进入蠕动模式运行且需要牵引工况运行时,采用牵引分级控制策略并限制最大牵引能力输出,输出不同的电流环,继而再按照蠕动模式的电流环接口方式输出调整后的pwm编码级位信号,车辆牵引单元根据pwm编码级位信号在小幅度牵引级位范围响应执行。
4.根据权利要求2所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的当列车进入蠕动模式运行且需要制动工况运行时,正常输出实时的制动级位对应的电流环,并按照蠕动模式的电流环接口方式输出pwm编码级位信号,车辆制动单元响应执行。
5.根据权利要求2所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的当列车进入蠕动模式运行且需要惰行工况运行时,既不输出牵引也不输出制动,车辆惰行行驶。
6.根据权利要求3或4所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的蠕动模式电流环接口级位传输方式为:由信号车载控制器输出预设范围的电流环级位信号到车辆pwm编码器;pwm编码器将电流环级位信号转换成pwm编码级位信号并输出到车辆的牵引或制动单元;牵引/制动单元根据列车牵引/制动/惰行指令,响应执行对应的级位信号控制列车运行。
7.根据权利要求6所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的信号车载控制器输出的电流环级位信号对应的模拟量范围为0-20ma。
8.根据权利要求7所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的电流环与级位的对应关系为:
9.根据权利要求3所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的牵引分级控制策略具体为:在需要牵引工况时,根据信号车载控制器的期望级位将牵引级位划分为若干个分层递阶等级,每一个等级对应一个固定的电流环。
10.根据权利要求9所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的牵引级位的等级划分根据每条线路顿挫感的强烈情况分别确定。
11.根据权利要求3所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的限制最大牵引能力输出具体为:主动限制信号车载控制器的最大输出牵引值,将输出的级位需求控制在一定幅度内调整。
12.根据权利要求3所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的最大牵引能力的限制值视具体情况而定。
13.根据权利要求3所述的一种fao系统蠕动模式舒适性提高方法,其特征在于,所述的限制最大牵引能力输出的分级控制策略使得蠕动模式的运行速度恒定在20km/h且不超过25km/h,且到站后能精确对标停车。
14.一种fao系统蠕动模式舒适性提高装置,其特征在于,包括:
15.一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1~13中任一项所述的方法。
16.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1~13中任一项所述的方法。
技术总结本发明涉及一种FAO系统蠕动模式舒适性提高方法、装置、设备及介质,其中方法包括以下步骤:列车进入蠕动模式运行,实时判断列车当前所需工况是牵引、制动还是惰行;如果列车处于牵引工况,则采用牵引分级控制策略并限制最大牵引能力输出,再按照蠕动模式的电流环接口方式输出调整后的PWM编码级位信号,允许车辆在小幅度牵引级位范围响应执行;如果列车处于制动工况,则正常输出实时的制动级位,不做特殊策略处理;如果列车处于惰行工况,既不输出牵引也不输出制动,车辆惰行行驶。与现有技术相比,本发明不仅能保证蠕动模式运行速度要求和精确停车要求,而且能有效解决运行过程中强烈的顿挫感,极大提高乘客舒适性。技术研发人员:向美柱,张铭瑶,熊金红,冯文韬,梁宇,马佳芸,徐艳阳,孙英可受保护的技术使用者:卡斯柯信号有限公司技术研发日:技术公布日:2024/3/24本文地址:https://www.jishuxx.com/zhuanli/20240718/233165.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表