一种林火监测无人机的制作方法
- 国知局
- 2024-08-01 05:25:34
本技术涉及无人机监测,具体为一种林火监测无人机。
背景技术:
1、森林是地球上最大的陆地生态系统,是全球生物圈中重要的一环,是地球上的基因库、碳贮库、蓄水库和能源库,对维系整个地球的生态平衡起着至关重要的作用。随着全球气温的逐渐升高,空气的干燥度越来越高,加上人为活动增多,林区可燃物质逐渐增多,森林火灾猛发、频发的特点更为明显。森林火灾一旦发生,往往具有成灾面积大,火区温度高等特点,火势难以控制,对自然环境和相关人员的生命财产安全造成严重破坏。目前使用广泛的森林火灾监测方法主要有:地面巡护、瞭望塔监测、航空巡护以及卫星遥感等。其中航空巡护主要依靠无人机搭载摄像头实现,具有视野较宽,机动性大,速度快,实时性高的优点。
2、目前常见的林火监测用无人机上通常设置有多组独立的电机与螺旋桨叶片,通过电机带动螺旋桨叶片转动为无人机提供升力。螺旋桨叶片通常固定在电机输出轴上,无人机升力的调节主要依靠调节电机带动螺旋桨叶片的转速实现,但是无人机对林火监测时,特别是已经出现林火现象后,林火产生的高温会导致空气密度降低,从而导致螺旋桨叶片产生的升力减小,引发性能下降,仅从螺旋将叶片转速调节升力达不到较好的效果,造成无人机的机动性下降,存在坠毁的风险,为此我们提出一种林火监测无人机以解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种林火监测无人机,解决了上述背景技术中提出的问题。
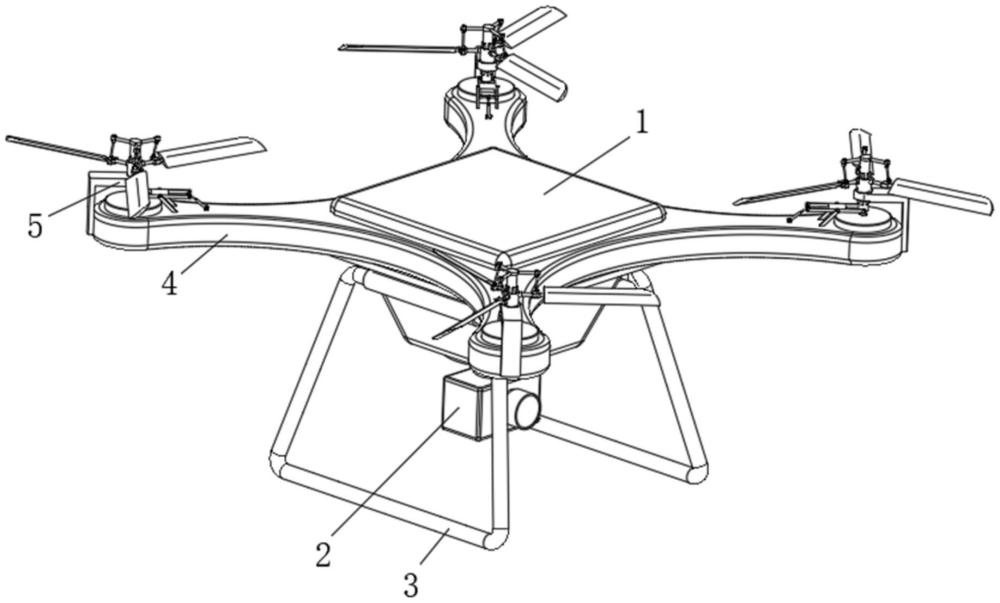
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种林火监测无人机,包括无人机本体,所述无人机本体的底部设置有摄像头以及位于摄像头两侧的支撑腿,所述无人机本体的周侧设置有若干安装臂,所述安装臂的端部设置有桨叶组件,且桨叶组件包括驱动电机、支撑臂、支撑座、调节叉架、电动伸缩杆,所述驱动电机镶嵌于安装臂的端部,所述驱动电机的输出轴上固定连接有驱动轴,且驱动轴的外部活动套装有调节套管,所述调节套管的外部活动套装有传动套管,所述传动套管的周侧设置有若干螺旋桨叶片,所述调节套管的外部设置有与螺旋桨叶片配合的关节连杆,所述支撑臂固定安装于安装臂上,所述调节套管的底端固定套装有调节叉座。
3、优选的,所述安装臂、桨叶组件的数量均为四组,四组所述安装臂均匀分布于无人机本体的周侧。
4、优选的,所述支撑臂的内部镶嵌有安装轴承,所述传动套管通过安装轴承活动套装于支撑臂的内部。
5、优选的,所述驱动轴的外部与调节套管的内部开设有相互配合的传动键与传动槽,所述调节套管的外部与传动套管的内部开设有相互配合的传动键与传动槽。
6、优选的,所述支撑座固定安装于安装臂的顶部,所述调节叉架活动安装于支撑座上,所述调节叉架的一端卡接在调节叉座上、另一端与电动伸缩杆的输出轴铰接,所述电动伸缩杆远离调节叉架的一端铰接于安装臂上。
7、优选的,所述调节套管顶端的周侧活动安装有若干关节连杆,且关节连杆的位置与螺旋桨叶片的位置一一对应。
8、优选的,所述调节套管的周侧活动安装有若干偏转传动块,且偏转传动块与螺旋桨叶片固定连接,所述关节连杆的底端与偏转传动块一侧活动连接。
9、本实用新型提供了一种林火监测无人机,具备以下有益效果:
10、1、该林火监测无人机,通过电动伸缩杆带动调节叉架移动,从而带动调节叉座、调节套管上下移动,进而通过关节连杆、偏转传动块传动,可实现对螺旋桨叶片偏转角度进行调节,从而实现对无人机升力进行调节,结合驱动电机对螺旋桨叶片转速进行调节,在突发状况时,可使无人机获得更大的升力,避免无人机坠落。
11、2、该林火监测无人机,多组桨叶组件相互独立,可单独对每个螺旋桨叶片的偏转角度进行调节,并结合驱动电机对螺旋桨叶片转速调节,可实现快速对每个螺旋桨叶片产生的升力进行调节,使无人机获得更高的机动性,更加适用于林区等复杂作业环境。
技术特征:1.一种林火监测无人机,包括无人机本体(1),所述无人机本体(1)的底部设置有摄像头(2)以及位于摄像头(2)两侧的支撑腿(3),所述无人机本体(1)的周侧设置有若干安装臂(4),其特征在于:所述安装臂(4)的端部设置有桨叶组件(5),且桨叶组件(5)包括驱动电机(51)、支撑臂(53)、支撑座(501)、调节叉架(502)、电动伸缩杆(503),所述驱动电机(51)镶嵌于安装臂(4)的端部,所述驱动电机(51)的输出轴上固定连接有驱动轴(52),且驱动轴(52)的外部活动套装有调节套管(55),所述调节套管(55)的外部活动套装有传动套管(54),所述传动套管(54)的周侧设置有若干螺旋桨叶片(58),所述调节套管(55)的外部设置有与螺旋桨叶片(58)配合的关节连杆(56),所述支撑臂(53)固定安装于安装臂(4)上,所述调节套管(55)的底端固定套装有调节叉座(59)。
2.根据权利要求1所述的一种林火监测无人机,其特征在于:所述安装臂(4)、桨叶组件(5)的数量均为四组,四组所述安装臂(4)均匀分布于无人机本体(1)的周侧。
3.根据权利要求2所述的一种林火监测无人机,其特征在于:所述支撑臂(53)的内部镶嵌有安装轴承(504),所述传动套管(54)通过安装轴承(504)活动套装于支撑臂(53)的内部。
4.根据权利要求3所述的一种林火监测无人机,其特征在于:所述驱动轴(52)的外部与调节套管(55)的内部开设有相互配合的传动键与传动槽,所述调节套管(55)的外部与传动套管(54)的内部开设有相互配合的传动键与传动槽。
5.根据权利要求4所述的一种林火监测无人机,其特征在于:所述支撑座(501)固定安装于安装臂(4)的顶部,所述调节叉架(502)活动安装于支撑座(501)上,所述调节叉架(502)的一端卡接在调节叉座(59)上、另一端与电动伸缩杆(503)的输出轴铰接,所述电动伸缩杆(503)远离调节叉架(502)的一端铰接于安装臂(4)上。
6.根据权利要求5所述的一种林火监测无人机,其特征在于:所述调节套管(55)顶端的周侧活动安装有若干关节连杆(56),且关节连杆(56)的位置与螺旋桨叶片(58)的位置一一对应。
7.根据权利要求6所述的一种林火监测无人机,其特征在于:所述调节套管(55)的周侧活动安装有若干偏转传动块(57),且偏转传动块(57)与螺旋桨叶片(58)固定连接,所述关节连杆(56)的底端与偏转传动块(57)一侧活动连接。
技术总结本技术涉及无人机监测技术领域,具体为一种林火监测无人机,包括无人机本体,所述无人机本体的底部设置有摄像头以及位于摄像头两侧的支撑腿,所述无人机本体的周侧设置有若干安装臂,所述安装臂的端部设置有桨叶组件,且桨叶组件包括驱动电机、支撑臂、支撑座、调节叉架、电动伸缩杆,所述驱动电机镶嵌于安装臂的端部。该林火监测无人机,通过电动伸缩杆带动调节叉架移动,从而带动调节叉座、调节套管上下移动,进而通过关节连杆、偏转传动块传动,可实现对螺旋桨叶片偏转角度进行调节,从而实现对无人机升力进行调节,结合驱动电机对螺旋桨叶片转速进行调节,在突发状况时,可使无人机获得更大的升力,避免无人机坠落。技术研发人员:张春香,闫业法,岳俊广,毛曹珏受保护的技术使用者:安徽龙运智能科技有限公司技术研发日:20231018技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/219675.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表