一种可调节的无人机对中装置的制作方法
- 国知局
- 2024-08-01 05:25:45
本技术属于无人机固定领域,具体涉及一种可调节的无人机对中装置。
背景技术:
1、随着无人机的快速发展,无人机自动机场广泛运用于工业、农业、城市、拍摄、娱乐等众多领域,目前无人机自动机场在无人干预的情况下自行起飞和降落,但现有技术中,对无人机精准降落gps要求比较高,增加了双rtk及视觉引导等辅助手段实现无人机精准降落,但是室外电子干扰环境复杂多变,飞机降落到停机平台上还是存在偏差。
技术实现思路
1、为了解决现有技术中的上述技术缺陷,本实用新型提出一种可调节的无人机对中装置。
2、实现本实用新型目的的技术解决方案为:
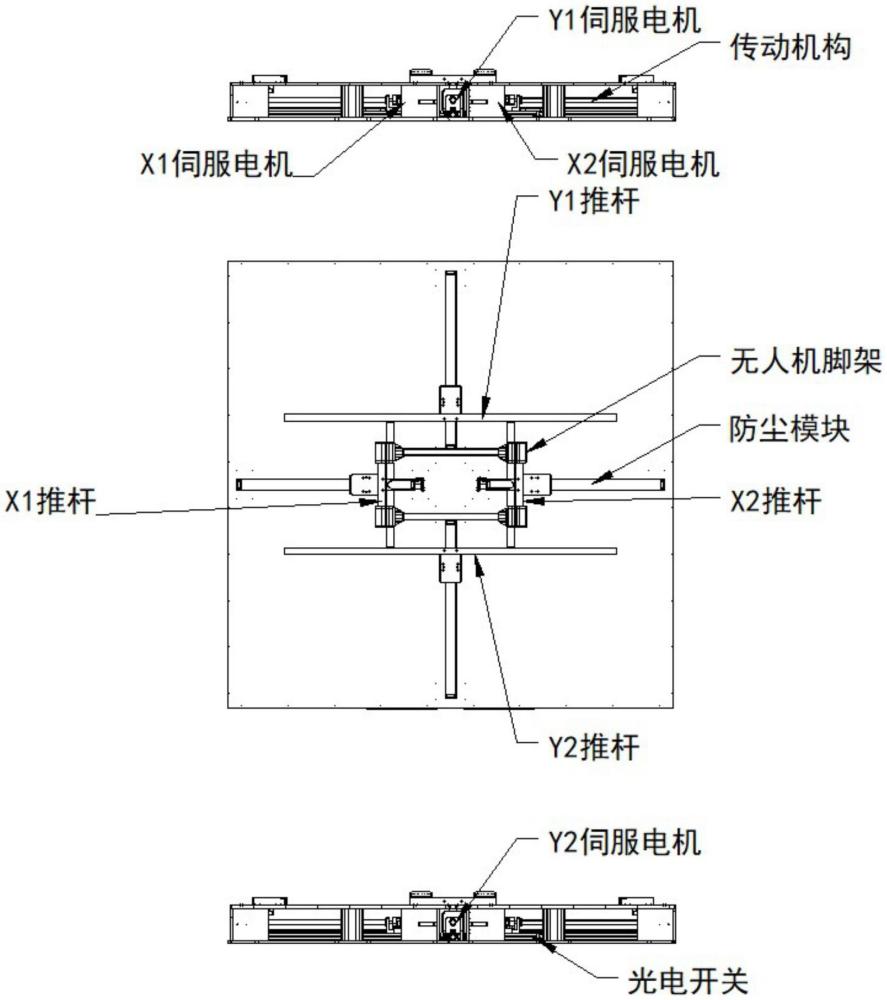
3、一种可调节的无人机对中装置,包括对中平台、伺服电机、推杆;
4、所述伺服电机和推杆设置在对中平台上,伺服电机的输出端与推杆连接。
5、进一步的,所述推杆包括水平推杆和竖直推杆,所述水平推杆和竖直推杆相互垂直设置;
6、所述伺服电机包括水平伺服电机和垂直伺服电机;
7、所述水平伺服电机的输出端与水平推杆连接,垂直伺服电机的输出端与竖直推杆连接。
8、进一步的,所述水平伺服电机包括第一水平伺服电机和第二水平伺服电机,所述水平伺服电机和第二水平伺服电机相对设置;
9、所述垂直伺服电机包括第一垂直伺服电机和第二垂直伺服电机,所述第一垂直伺服电机和第二垂直伺服电机相对设置;
10、所述水平推杆包括第一水平推杆和第二水平推杆,第一水平伺服电机和第二水平伺服电机的输出端分别与第一水平推杆和第二水平推杆连接;
11、所述竖直推杆包括第一竖直推杆和第二竖直推杆,第一垂直伺服电机和第二垂直伺服电机的输出端分别与第一竖直推杆和第二竖直推杆连接。
12、进一步的,所述推杆采用铝合金材料。
13、进一步的,所述对中平台上设置固定装置。
14、所述对中平台上设置光电开关。
15、进一步的,所述对中平台上设置防尘单元。
16、进一步的,所述装置还包括传动机构;
17、所述水平伺服电机包括第一水平伺服电机和第二水平伺服电机,所述水平伺服电机和第二水平伺服电机相对设置;
18、所述水平推杆包括第一水平推杆和第二水平推杆,第一水平伺服电机和第二水平伺服电机的输出端分别通过传动机构与第一水平推杆和第二水平推杆连接;
19、所述竖直推杆包括第一竖直推杆和第二竖直推杆,第一垂直伺服电机和第二垂直伺服电机的输出端分别通过传动机构与第一竖直推杆和第二竖直推杆连接。
20、本实用新型与现有技术相比,其显著优点为:
21、本实用新型基于水平以及竖直的相对的伺服电机推动相对的推杆,可以将无人机调节对中,或者调节至需要的位置,并进行固定,方面无人机的精准充电以及固定。
22、下面结合附图和具体实施方式对本实用新型作进一步详细描述。
技术特征:1.一种可调节的无人机对中装置,其特征在于,包括对中平台、伺服电机、推杆;
2.根据权利要求1所述的可调节的无人机对中装置,其特征在于,所述推杆采用铝合金材料。
3.根据权利要求1所述的可调节的无人机对中装置,其特征在于,所述对中平台上设置固定装置。
4.根据权利要求1所述的可调节的无人机对中装置,其特征在于,所述对中平台上设置光电开关。
5.根据权利要求1所述的可调节的无人机对中装置,其特征在于,所述对中平台上设置防尘单元。
6.根据权利要求1所述的可调节的无人机对中装置,其特征在于,所述装置还包括传动机构;
技术总结本技术公开了一种可调节的无人机对中装置,包括对中平台、伺服电机、推杆,其中伺服电机和推杆设置在对中平台上,伺服电机的输出端与推杆连接,当无人机降落到对中平台上时,无人机脚架降落在对中平台上,此时垂直伺服电机带动竖直推杆,将无人机进行上下居中;之后水平伺服电机电机带动水平推杆进行缓慢推进,将无人机进行左右居中,完成无人机的对中操作。本技术基于水平以及竖直的相对的伺服电机推动相对的推杆,可以将无人机调节对中,或者调节至需要的位置,并进行固定,完成无人机的精准充电以及固定。技术研发人员:张红彬,范海荣,万鹏飞受保护的技术使用者:拓恒技术有限公司技术研发日:20230606技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/219703.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种电动滑行器的制作方法
下一篇
返回列表