一种非对称四旋翼飞行器
- 国知局
- 2024-08-01 05:27:45
本技术属于无人机领域,尤其是涉及一种非对称四旋翼飞行器。
背景技术:
1、目前市场上的四旋翼飞行器大都为x布局,并且四个电机和桨叶都是一样的规格。这种四旋翼飞行器的布局对电机和桨叶要求苛刻,存在许多限制。而传统的十字布局四旋翼飞行器,因电机型号不同、桨叶不同,从而导致的反扭距不同,导致控制机体比较复杂,操作不便。这就需要一款操作简单的十字布局四旋翼飞行器。
技术实现思路
1、有鉴于此,本实用新型旨在提出一种非对称四旋翼飞行器。
2、为达到上述目的,本实用新型的技术方案是这样实现的:
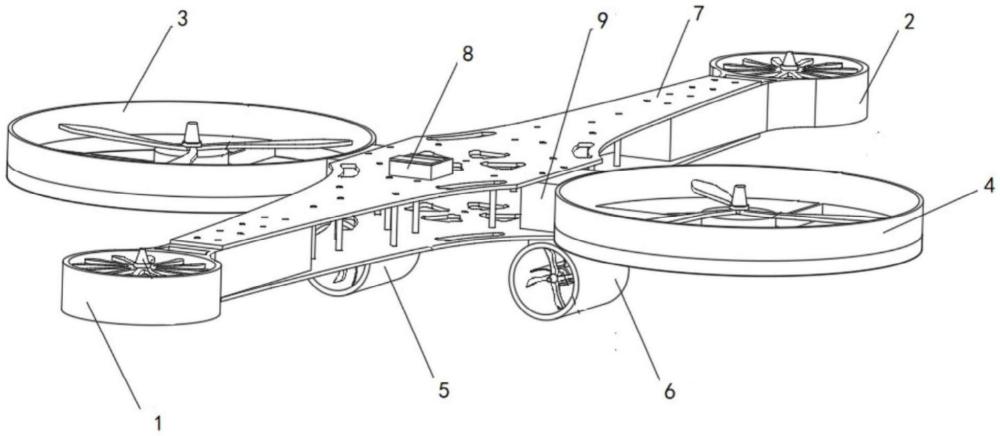
3、一种非对称四旋翼飞行器,包括十字形机身和4个涵道,所述机身前后方向比较长,前端设置有第一涵道,后端设置有第二涵道,所述机身左右方向比较短,右端设置有第三涵道,左端设置有第四涵道;
4、所述4个涵道内部都设置有电机座,电机座上都设置有无刷电机,所述第一涵道、第二涵道、第三涵道和第四涵道分别对应第一电机、第二电机、第三电机和第四电机;
5、所述第一电机安装正桨,所述第二电机安装反桨,所述第三电机安装正桨,所述第四电机安装反桨。所述第一电机与第二电机的型号和安装的螺旋桨规格一样,所述第三电机与第四电机的型号和安装的螺旋桨规格一样。
6、进一步的,还包括2个吊舱,所述吊舱安装在所述机身底部左右两侧。
7、进一步的,吊舱内还设置有无刷电机,右侧为第五电机,左侧为第六电机,所述第五电机安装正桨,所述第六电机安装反桨,所述第五电机与第六电机的型号和安装的螺旋桨规格一样。
8、进一步的,所述机身上还设置有飞行控制器安放台和电子调速器esc,所述飞行控制器安放台上安装有飞行控制器,所述飞行控制器分别与所述电子调速器esc、第一电机、第二电机、第三电机、第四电机、第五电机和第六电机连接。
9、进一步的,所述飞行控制器为f3飞行控制器。
10、进一步的,所述飞行控制器内部设置有姿态传感器。
11、进一步的,所述机身包括上机身和下机身,上机身和下机身之间通过螺柱连接。
12、进一步的,所述机身通过连接支柱与所述第三涵道和第四涵道连接。
13、进一步的,所述机身长度方向和宽度方向的长度比例为2:1。
14、进一步的,第一电机和第二电机采用的是群汐70mm涵道qf3027-kv2200,螺旋桨采用的是群汐70mm涵道十二叶桨叶;
15、第三电机和第四电机采用的是朗宇三代x2220-kv2200,螺旋桨采用gemfan乾丰7035三叶桨;
16、第五电机和第六电机采用的涵道电机套装型号是群汐30mm涵道qf1611-kv5000,螺旋桨采用群汐30mm涵道六叶桨。
17、本实用新型具有的优点和积极效果是:由于采用上述技术方案,本实用新型提供了一款采用两组不同的电机和桨叶的非对称四旋翼飞行器,从而实现四旋翼的非对称性,也解决了两组不同规格电机和桨叶因为产生的反扭距不同而无法稳定飞行的问题。解决了现有的技术对起降环境要求苛刻,无法定点侦察,机动性能较低,工作效率低的问题。操作简单,使用方便。
技术特征:1.一种非对称四旋翼飞行器,其特征在于:包括十字形机身和4个涵道,所述机身前后方向比较长,前端设置有第一涵道,后端设置有第二涵道,所述机身左右方向比较短,右端设置有第三涵道,左端设置有第四涵道;
2.根据权利要求1所述的非对称四旋翼飞行器,其特征在于:还包括2个吊舱,所述吊舱安装在所述机身底部左右两侧。
3.根据权利要求2所述的非对称四旋翼飞行器,其特征在于:吊舱内还设置有无刷电机,右侧为第五电机,左侧为第六电机,所述第五电机安装正桨,所述第六电机安装反桨,所述第五电机与第六电机的型号和安装的螺旋桨规格一样。
4.根据权利要求1所述的非对称四旋翼飞行器,其特征在于:所述机身上还设置有飞行控制器安放台和电子调速器esc,所述飞行控制器安放台上安装有飞行控制器,所述飞行控制器分别与所述电子调速器esc、第一电机、第二电机、第三电机、第四电机、第五电机和第六电机连接。
5.根据权利要求4所述的非对称四旋翼飞行器,其特征在于:所述飞行控制器为f3飞行控制器。
6.根据权利要求4所述的非对称四旋翼飞行器,其特征在于:所述飞行控制器内部设置有姿态传感器。
7.根据权利要求1所述的非对称四旋翼飞行器,其特征在于:所述机身包括上机身和下机身,上机身和下机身之间通过螺柱连接。
8.根据权利要求1所述的非对称四旋翼飞行器,其特征在于:所述机身通过连接支柱与所述第三涵道和第四涵道连接。
9.根据权利要求1所述的非对称四旋翼飞行器,其特征在于:所述机身长度方向和宽度方向的长度比例为2:1。
10.根据权利要求3所述的非对称四旋翼飞行器,其特征在于:第一电机和第二电机采用的是群汐70mm涵道qf3027-kv2200,螺旋桨采用的是群汐70mm涵道十二叶桨叶;
技术总结本技术提供一种非对称四旋翼飞行器,包括十字形机身和4个涵道,所述机身前后方向比较长,前端设置有第一涵道,后端设置有第二涵道,所述机身左右方向比较短,右端设置有第三涵道,左端设置有第四涵道;所述4个涵道内部都设置有电机座,电机座上都设置有无刷电机,所述第一涵道、第二涵道、第三涵道和第四涵道分别对应第一电机、第二电机、第三电机和第四电机。本技术的有益效果是:本技术提供了一款采用两组不同的电机和桨叶的非对称四旋翼飞行器,从而实现四旋翼的非对称性,也解决了两组不同规格电机和桨叶因为产生的反扭距不同而无法稳定飞行的问题,操作简单,使用方便。技术研发人员:陈信余,王玉娜,李泊乐,李豪,赵天齐受保护的技术使用者:中国民航大学技术研发日:20230918技术公布日:2024/4/24本文地址:https://www.jishuxx.com/zhuanli/20240722/219869.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。