一种智慧水利工程巡查巡检方法与流程
- 国知局
- 2024-08-01 05:29:33
本发明涉及水面垃圾处理,具体是一种智慧水利工程巡查巡检方法。
背景技术:
1、随着科技的发展和人们对水资源的重视,智慧水利工程是重要的民生工程,也是智慧城市的重要组成部分,其中水环境保护是智慧水利工程中重要的一项民生工程,然而现有的水库或河流的水体中经常会有漂浮物出现,这些漂浮物要么是人类丢弃的垃圾,要么是树木的枝叶、随水流漂浮的水生植物等有机物,随着这些漂浮物在水体中浸泡的时间推移,会产生腐烂,对水体造成污染,严重影响水质。
2、为了避免漂浮物堆积发酵,对水体造成更加严重的污染,需要及时去除这些漂浮物,现有的方法一是在河流上或水库的出入口等部位设置拦截网或坝体等漂浮物俘获机构,只能在高度差引起水流动时才能对漂浮物进行拦截,不能对平缓的湖面等进行漂浮物拦截,造成漂浮物长时间漂浮在水体中。
3、对此,中国已授权专利,授权公告号:cn112127340b,提出了一种智慧水利工程巡查巡检设备,通过无人机飞行的过程中带动全景摄像头对水面进行巡查巡检,通过距离传感器检测无人机的底部与水面之间的距离,当距离较远不能判断漂浮物时,无人机降低飞行高度,再次拍摄漂浮物进行判断,当判断为设定的漂浮物时,无人机降低飞行高度,通过打捞装置对漂浮物进行打捞,工作人员将打捞装置打捞的漂浮物进行清理,能够及时发现并清理水面上的漂浮物,降低由于漂浮物较少时,不能及时清理导致漂浮物发酵腐烂影响水面环境和水质。
4、但在实际使用中发现,上述设备由于没有设置装载结构导致在打捞到漂浮物时便需要无人机飞回收集点,在水面上的飘浮物较多时,无人机需要多次往返作业,一方面增加无人机的能耗,另一方面造成清理作业周期长,不利于清理作业快速完工。
技术实现思路
1、本发明的目的在于提供一种智慧水利工程巡查巡检方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种智慧水利工程巡查巡检方法,包括以下步骤:
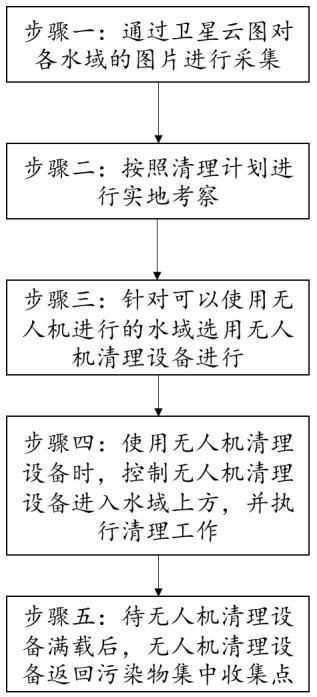
4、步骤一:通过卫星云图对各水域的图片进行采集,并根据水域的污染情况制定污染物清理计划;
5、步骤二:按照清理计划进行实地考察,并根据现场实际情况选择合适的清理工具;
6、步骤三:针对可以使用无人机进行的水域选用无人机清理设备进行;
7、步骤四:使用无人机清理设备时,控制无人机清理设备进入水域上方,并执行清理工作;
8、步骤五:待无人机清理设备满载后,无人机清理设备返回污染物集中收集点,并再次返回以继续清理,直至该水域内污染物被打捞干净。
9、作为本发明进一步的方案:所述无人机清理设备包括:
10、无人机本体,所述无人机本体上设置有广角摄像头;
11、储放机构,与所述无人机本体连接,所述储放机构包括储放组件以及随动组件,所述随动组件能够在所述无人机本体启动时,驱使储放组件动作,以对置于所述储放组件内的污染物进行压缩;
12、收集组件,与所述储放组件转动连接,所述收集组件能够将飘浮在水域上的污染物打捞至储放组件内;
13、侧板,转动安装在所述储放组件内,所述侧板通过锁合组件与所述储放组件连接。
14、作为本发明再进一步的方案:所述随动组件包括转动安装在所述无人机本体上的旋转杆,所述旋转杆通过连接带连接所述无人机本体的旋转叶片;
15、所述旋转杆的内部为中空结构,且所述旋转杆内滑动安装有伸缩杆,所述伸缩杆的一端与所述储放组件连接,另一端与设置在所述旋转杆上的离心结构连接。
16、作为本发明再进一步的方案:所述离心结构包括对称设置在所述旋转杆上的两个旋转板,所述旋转板沿其长度方向上设置有滑槽,所述滑槽内滑动安装有配重滑块,所述配重滑块上转动安装有牵拉连接杆,所述牵拉连接杆远离所述配重滑块的一端贯穿设置在所述旋转杆上的通槽并与所述伸缩杆转动连接。
17、作为本发明再进一步的方案:所述储放组件包括与所述无人机本体固定连接的装载箱体,所述装载箱体的侧壁上设置有多个导水口,且所述装载箱体的一侧开设有置物口;
18、所述储放组件还包括滑动设置在所述装载箱体内的压缩板,所述压缩板上设置有同所述伸缩杆转动连接的连接件,且所述压缩板与设置在所述装载箱体内的储能结构连接。
19、作为本发明再进一步的方案:所述储能结构包括设置在所述装载箱体内并与所述压缩板滑动连接的立轴,所述立轴上套设有一号柱形弹簧,所述一号柱形弹簧的一端与所述压缩板连接,另一端与所述装载箱体的内壁连接。
20、作为本发明再进一步的方案:所述收集组件包括对称且转动安装在所述装载箱体上的两个联板,其中一个所述联板上固定有驱动装置,两个所述联板之间转动安装有两个皮带轮,两个所述皮带轮之间套设有传输带;
21、所述驱动装置的输出轴与其中一个所述皮带轮的转轴同轴固定连接。
22、作为本发明再进一步的方案:所述锁合组件包括形成于侧板两侧的两个容滞槽,所述容滞槽内滑动贯穿其侧壁的活动轴,两个所述活动轴通过提拉轴连接,且所述提拉轴贯穿所述活动轴并形成锁合轴,所述锁合轴与设置在所述装载箱体内壁上的锁合槽适配;
23、所述活动轴上设置有限位盘以及限位环,且所述活动轴上套设有二号柱形弹簧,所述二号柱形弹簧的一端与所述限位盘连接,另一端与所述容滞槽的内壁连接。
24、作为本发明再进一步的方案:所述锁合槽包括倾斜槽体以及竖直槽体,所述倾斜槽体与竖直槽体连通,所述锁合轴能够在所述倾斜槽体以及竖直槽体内滑动。
25、作为本发明再进一步的方案:所述装载箱体侧部设置有一号空心飘浮桶,所述联板的侧部设置有二号空心飘浮桶。
26、与现有技术相比,本发明的有益效果是:
27、通过设置的储放机构,使得在装载箱体内装满污染物,当无人机本体起飞返回时,压缩板能够对装载箱体中污染物内的水分进行挤出,而降低污染物中的水含量,进而降低无人机本体的起飞重量,降低无人机本体的电耗,使无人机本体能够执行更长时间的清理工作,且装载箱体内具有一定的装载能力,而不需要在收集装置收集到污染物便返回,提高水域内污染物的清理速度;
28、通过设置的收集组件,实现了在驱动装置转动时,能够连续性对污染物进行打捞,相较于现有技术中采用机械手抓取的方式,显然本申请的打捞速度更快,可有效缩短清理周期;
29、通过设置的侧板以及锁合组件,使得侧板的翻转与锁止切换更加方便,从而在将装载箱体内的污染物取出时更加便捷,降低操作难度,缩短污染物的清理周期。
技术特征:1.一种智慧水利工程巡查巡检方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种智慧水利工程巡查巡检方法,其特征在于,所述无人机清理设备包括:
3.根据权利要求2所述的一种智慧水利工程巡查巡检方法,其特征在于,所述随动组件包括转动安装在所述无人机本体(1)上的旋转杆(3),所述旋转杆(3)通过连接带(2)连接所述无人机本体(1)的旋转叶片;
4.根据权利要求3所述的一种智慧水利工程巡查巡检方法,其特征在于,所述离心结构包括对称设置在所述旋转杆(3)上的两个旋转板(6),所述旋转板(6)沿其长度方向上设置有滑槽(601),所述滑槽(601)内滑动安装有配重滑块(7),所述配重滑块(7)上转动安装有牵拉连接杆(5),所述牵拉连接杆(5)远离所述配重滑块(7)的一端贯穿设置在所述旋转杆(3)上的通槽(301)并与所述伸缩杆(4)转动连接。
5.根据权利要求4所述的一种智慧水利工程巡查巡检方法,其特征在于,所述储放组件包括与所述无人机本体(1)固定连接的装载箱体(10),所述装载箱体(10)的侧壁上设置有多个导水口(1001),且所述装载箱体(10)的一侧开设有置物口;
6.根据权利要求5所述的一种智慧水利工程巡查巡检方法,其特征在于,所述储能结构包括设置在所述装载箱体(10)内并与所述压缩板(9)滑动连接的立轴(11),所述立轴(11)上套设有一号柱形弹簧(12),所述一号柱形弹簧(12)的一端与所述压缩板(9)连接,另一端与所述装载箱体(10)的内壁连接。
7.根据权利要求5所述的一种智慧水利工程巡查巡检方法,其特征在于,所述收集组件包括对称且转动安装在所述装载箱体(10)上的两个联板(23),其中一个所述联板(23)上固定有驱动装置(20),两个所述联板(23)之间转动安装有两个皮带轮(21),两个所述皮带轮(21)之间套设有传输带(22);
8.根据权利要求5所述的一种智慧水利工程巡查巡检方法,其特征在于,所述锁合组件包括形成于侧板(13)两侧的两个容滞槽(1301),所述容滞槽(1301)内滑动贯穿其侧壁的活动轴(14),两个所述活动轴(14)通过提拉轴(18)连接,且所述提拉轴(18)贯穿所述活动轴(14)并形成锁合轴(16),所述锁合轴(16)与设置在所述装载箱体(10)内壁上的锁合槽(17)适配;
9.根据权利要求8所述的一种智慧水利工程巡查巡检方法,其特征在于,所述锁合槽(17)包括倾斜槽体(1701)以及竖直槽体(1702),所述倾斜槽体(1701)与竖直槽体(1702)连通,所述锁合轴(16)能够在所述倾斜槽体(1701)以及竖直槽体(1702)内滑动。
10.根据权利要求7所述的一种智慧水利工程巡查巡检方法,其特征在于,所述装载箱体(10)侧部设置有一号空心飘浮桶(19),所述联板(23)的侧部设置有二号空心飘浮桶(24)。
技术总结本发明涉及水面垃圾处理领域,具体是一种智慧水利工程巡查巡检方法,包括以下步骤:步骤一:通过卫星云图对各水域的图片进行采集,并根据水域的污染情况制定污染物清理计划;步骤二:按照清理计划进行实地考察,并根据现场实际情况选择合适的清理工具;步骤三:针对可以使用无人机进行的水域选用无人机清理设备进行;步骤四:使用无人机清理设备时,控制无人机清理设备进入水域上方,并执行清理工作;步骤五:待无人机清理设备满载后,无人机清理设备返回污染物集中收集点,并再次返回以继续清理,直至该水域内污染物被打捞干净,以对水域上的污染物及时清理,避免污染物发酵进一步污染、恶化水质。技术研发人员:郭锐,武素芬,范金兆,黄勇,张星受保护的技术使用者:范金兆技术研发日:技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240722/220030.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表