一种舰载直升机主被动自适应起落架及其使用方法
- 国知局
- 2024-08-01 05:32:38
本发明属于直升机起落架,具体涉及一种舰载直升机主被动自适应起落架及其使用方法。
背景技术:
1、海面情况复杂多样,导致舰船甲板平面的倾仰角和翻滚角不断变化,大大降低了舰载直升机的降落和系留过程中的安全性和稳定性。传统式直升机起落架主要分为两大类:滑橇式起落架和轮式起落架,最常见的起落架是滑橇式起落架,其具有设计简单,结构轻,便于维护等优点。同时,对于大型重载直升机而言,轮式起落架相对更具有实用性和便捷性。但是,上述两种起落架由于结构固定,不能针对降落地形和环境进行实时主动调整,导致这两种起落架对于起降场地的要求较高,不能用于倾仰角和翻滚角不断变化的舰船甲板,只能用于陆地相对平坦的地面和较小幅度摇晃的舰船甲板。
技术实现思路
1、本发明提供一种舰载直升机主被动自适应起落架及其使用方法,通过采集舰船甲板和直升机机身的姿态信息,控制电机改变主动腿的姿态以主动适应舰船甲板倾仰角和翻滚角不断变化,同时被动腿能根据甲板平面的姿态被动调整以适应舰船甲板的翻滚角不断变化,从而使舰载直升机机体在降落和系留舰船甲板的过程中保持水平。
2、本发明的技术方案如下:
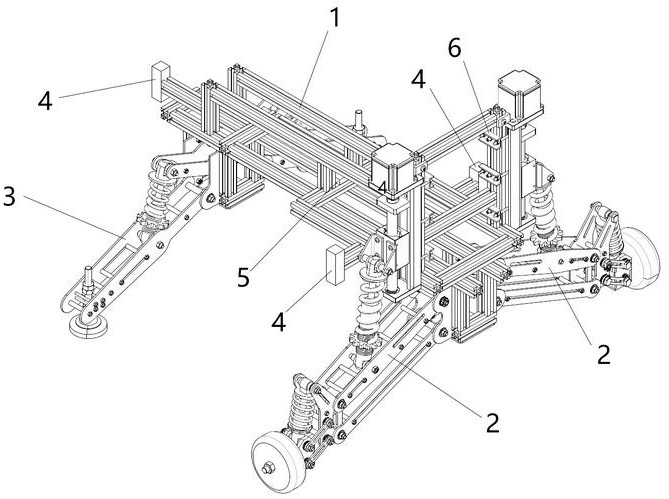
3、一种舰载直升机主被动自适应起落架,包括框架、两个主动腿、被动腿、陀螺仪和三个激光测距仪,两个主动腿分别对称设置在所述框架前部的两侧,被动腿设置在所述框架后部;其中两个激光测距仪分别对称设置在所述框架前部的两侧,另一个激光测距仪设置在所述框架后部;所述陀螺仪设置在所述框架中部。
4、进一步地,所述的舰载直升机主被动自适应起落架,所述主动腿包括电机丝杠滑台、滑台固定片、摆臂铰链、上摆臂、下摆臂、腿部减震器、滑块连接铰链和着地足,所述电机丝杠滑台通过滑台固定片与所述框架紧固连接,所述摆臂铰链与所述框架紧固连接,上摆臂和下摆臂的两端分别与所述摆臂铰链及着地足通过轴承铰接,腿部减震器一端与上摆臂通过轴承铰接、另一端与滑块连接铰链通过轴承铰接,所述滑块连接铰链与所述电机丝杠滑台的滑块紧固连接。
5、进一步地,所述的舰载直升机主被动自适应起落架,所述着地足包括脚部支架、脚部摇臂、脚部铰链、脚轮和脚部减震器,脚部支架的一侧与上摆臂和下摆臂通过轴承铰接、另一侧与脚部摇臂的一端通过轴承铰接,脚部摇臂的另一端与脚部铰链通过轴承铰接,所述脚轮与脚部铰链通过轴承铰接,脚部减震器的一端与脚部支架通过轴承铰接、另一端与脚部铰链通过轴承铰接。
6、进一步地,所述的舰载直升机主被动自适应起落架,所述滑台固定片共有6个,每个主动腿通过3个滑台固定片与所述框架紧固连接。
7、进一步地,所述的舰载直升机主被动自适应起落架,所述被动腿包括支座、机体铰链、连杆、左缓冲器、左摆臂、左后脚座钢管、左球头支脚、右缓冲器、右摆臂、右后脚座钢管和右球头支脚,所述支座和机体铰链与所述框架紧固连接,所述连杆的中部与机体铰链通过轴承铰接;左摆臂的一端与所述支座的左侧通过轴承铰接,左摆臂的另一端与左后脚座钢管紧固连接,左后脚座钢管下设左球头支脚;右摆臂的一端与所述支座的右侧通过轴承铰接,右摆臂的另一端与右后脚座钢管紧固连接,右后脚座钢管下设右球头支脚;左缓冲器的一端与机体铰链的左端通过轴承铰接、另一端与左摆臂通过轴承铰接,右缓冲器的一端与机体铰链的右端通过轴承铰接、另一端与右摆臂通过轴承铰接。
8、进一步地,所述的舰载直升机主被动自适应起落架,左缓冲器、左摆臂、左后脚座钢管、左球头支脚与右缓冲器、右摆臂、右后脚座钢管、右球头支脚关于所述框架的中面对称布置。
9、进一步地,所述的舰载直升机主被动自适应起落架,所述陀螺仪和激光测距仪将数据传输到上位机,所述上位机通过下位机控制所述电机丝杠滑台的电机执行动作。
10、上述舰载直升机主被动自适应起落架的使用方法,包括如下方式:
11、步骤一、当舰载直升机降落舰船甲板时,三个激光测距仪检测舰船甲板上三个测量点,得到三个激光测距仪与三个测量点之间垂直方向上的距离,将测量信息上传至上位机;上位机计算出舰船甲板平面的倾仰角和翻滚角,推导出主动腿需要调整的角度,并发送给下位机使其控制所述电机丝杠滑台的电机旋转,以完成主动腿姿态的调整;在舰载直升机降落舰船甲板过程中,不断执行本步骤直至激光测距仪测量距离超过阈值;
12、步骤二、当舰载直升机系留舰船甲板时,通过陀螺仪检测舰载直升机机身的倾仰角和翻滚角变化,在陀螺仪检测过程中,舰载直升机及其起落架视为刚体,此时舰载直升机机身的倾仰角和翻滚角的变化值即为舰船甲板平面倾仰角和翻滚角的变化值;陀螺仪将倾仰角和翻滚角变化的信息上传至上位机,上位机推导出主动腿需要调整的角度,并发送给下位机使其控制所述电机丝杠滑台的电机旋转,以完成主动腿姿态的调整,从而使舰载直升机的机身系留舰船甲板过程中始终保持水平;在舰载直升机系留舰船甲板过程中,不断执行本步骤直至舰载直升机离开舰船甲板。
13、进一步地,所述的舰载直升机主被动自适应起落架的使用方法,所述被动腿的姿态完全取决于舰船甲板的翻滚角,当舰船甲板的翻滚角确定则被动腿的姿态确定。
14、本发明的有益效果为:
15、1、本发明可以实现舰载直升机在复杂海况下降落、系留舰船甲板,可以根据舰船甲板的倾仰角和翻滚角实时调整起落架的主动腿的姿态,用以适应当下舰船甲板,从而使舰载直升机在降落、系留舰船甲板过程中,保持机体的平衡。
16、2、本发明采用了多级缓冲器,可有效降低舰载直升机降落舰船甲板过程中的冲击和振动。
技术特征:1.一种舰载直升机主被动自适应起落架,其特征在于,包括框架、两个主动腿、被动腿、陀螺仪和三个激光测距仪,两个主动腿分别对称设置在所述框架前部的两侧,被动腿设置在所述框架后部;其中两个激光测距仪分别对称设置在所述框架前部的两侧,另一个激光测距仪设置在所述框架后部;所述陀螺仪设置在所述框架中部。
2.根据权利要求1所述的舰载直升机主被动自适应起落架,其特征在于,所述主动腿包括电机丝杠滑台、滑台固定片、摆臂铰链、上摆臂、下摆臂、腿部减震器、滑块连接铰链和着地足,所述电机丝杠滑台通过滑台固定片与所述框架紧固连接,所述摆臂铰链与所述框架紧固连接,上摆臂和下摆臂的两端分别与所述摆臂铰链及着地足通过轴承铰接,腿部减震器一端与上摆臂通过轴承铰接、另一端与滑块连接铰链通过轴承铰接,所述滑块连接铰链与所述电机丝杠滑台的滑块紧固连接。
3.根据权利要求2所述的舰载直升机主被动自适应起落架,其特征在于,所述着地足包括脚部支架、脚部摇臂、脚部铰链、脚轮和脚部减震器,脚部支架的一侧与上摆臂和下摆臂通过轴承铰接、另一侧与脚部摇臂的一端通过轴承铰接,脚部摇臂的另一端与脚部铰链通过轴承铰接,所述脚轮与脚部铰链通过轴承铰接,脚部减震器的一端与脚部支架通过轴承铰接、另一端与脚部铰链通过轴承铰接。
4.根据权利要求2所述的舰载直升机主被动自适应起落架,其特征在于,所述滑台固定片共有6个,每个主动腿通过3个滑台固定片与所述框架紧固连接。
5.根据权利要求2所述的舰载直升机主被动自适应起落架,其特征在于,所述被动腿包括支座、机体铰链、连杆、左缓冲器、左摆臂、左后脚座钢管、左球头支脚、右缓冲器、右摆臂、右后脚座钢管和右球头支脚,所述支座和机体铰链与所述框架紧固连接,所述连杆的中部与机体铰链通过轴承铰接;左摆臂的一端与所述支座的左侧通过轴承铰接,左摆臂的另一端与左后脚座钢管紧固连接,左后脚座钢管下设左球头支脚;右摆臂的一端与所述支座的右侧通过轴承铰接,右摆臂的另一端与右后脚座钢管紧固连接,右后脚座钢管下设右球头支脚;左缓冲器的一端与机体铰链的左端通过轴承铰接、另一端与左摆臂通过轴承铰接,右缓冲器的一端与机体铰链的右端通过轴承铰接、另一端与右摆臂通过轴承铰接。
6.根据权利要求5所述的舰载直升机主被动自适应起落架,其特征在于,左缓冲器、左摆臂、左后脚座钢管、左球头支脚与右缓冲器、右摆臂、右后脚座钢管、右球头支脚关于所述框架的中面对称布置。
7.根据权利要求2-6之一所述的舰载直升机主被动自适应起落架,其特征在于,所述陀螺仪和激光测距仪将数据传输到上位机,所述上位机通过下位机控制所述电机丝杠滑台的电机执行动作。
8.如权利要求7所述的舰载直升机主被动自适应起落架的使用方法,其特征在于,包括如下方式:
技术总结本发明属于直升机起落架技术领域,具体涉及一种舰载直升机主被动自适应起落架及其使用方法。技术方案如下:包括框架、两个主动腿、被动腿、陀螺仪和三个激光测距仪,两个主动腿分别对称设置在所述框架前部的两侧,被动腿设置在所述框架后部;其中两个激光测距仪分别对称设置在所述框架前部的两侧,另一个激光测距仪设置在所述框架后部;所述陀螺仪设置在所述框架中部。本发明通过采集舰船甲板和直升机机身的姿态信息,控制电机改变主动腿的姿态以主动适应舰船甲板倾仰角和翻滚角不断变化,同时被动腿能根据甲板平面的姿态被动调整以适应舰船甲板的翻滚角不断变化,从而使舰载直升机机体在降落和系留舰船甲板的过程中保持水平。技术研发人员:杨强,张鸿祥,郭家兴,张华雨,张人升,刘林志,郝帅,高源,陈创,李阔,范同福受保护的技术使用者:东北大学技术研发日:技术公布日:2024/5/6本文地址:https://www.jishuxx.com/zhuanli/20240722/220274.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表