一种基于模块化设计的多旋翼无人机机巢
- 国知局
- 2024-08-01 05:35:21
本技术涉及无人机,特别是涉及一种基于模块化设计的多旋翼无人机机巢。
背景技术:
1、现有技术中一部分基于模块化设计的多旋翼无人机机巢仅可容纳一架无人机,其占地面积较小,但进行测绘、巡检、运输等任务时需消耗较长时间;而另一部分基于模块化设计的多旋翼无人机机巢虽立式设置,占地面积较小,并可容纳多架无人机,进行测绘、巡检、运输等任务时消耗时间较短,但一旦舱门发生故障,所有的无人机均无法起降,此时无人机无法进行测绘、巡检、运输等任务,工作效率较低。
2、例如专利文件cn113247288a中底座两侧开设有滑轨,底座通过滑轨滑动连接有外壳,多层停放机构活动设置在底座上方,多层停放机构包括有第一支撑板,第一支撑板上方通过插杆与弹簧弹性连接有第一充电板,第二支撑板与第三支撑板上方分别弹性连接有第二充电板与第三充电板,第一~第三充电板上均停放有无人机,但当外壳出现卡顿等故障时,第一~第三充电板上的无人机将均不能起飞,从而极大的降低了无人机进行测绘、巡检、运输等任务的工作效率。
3、故如何在降低基于模块化设计的多旋翼无人机机巢在水平方向上的占地面积时,使得无人机进行测绘、巡检、运输等任务时具有较高的工作效率成为了本领域技术人员亟需解决的技术问题。
技术实现思路
1、本实用新型的目的是提供一种基于模块化设计的多旋翼无人机机巢,以解决上述现有技术存在的问题,在减小基于模块化设计的多旋翼无人机机巢水平方向占地面积的同时,使得无人机进行测绘、巡检、运输等任务具有较高的工作效率。
2、为实现上述目的,本实用新型提供了如下方案:
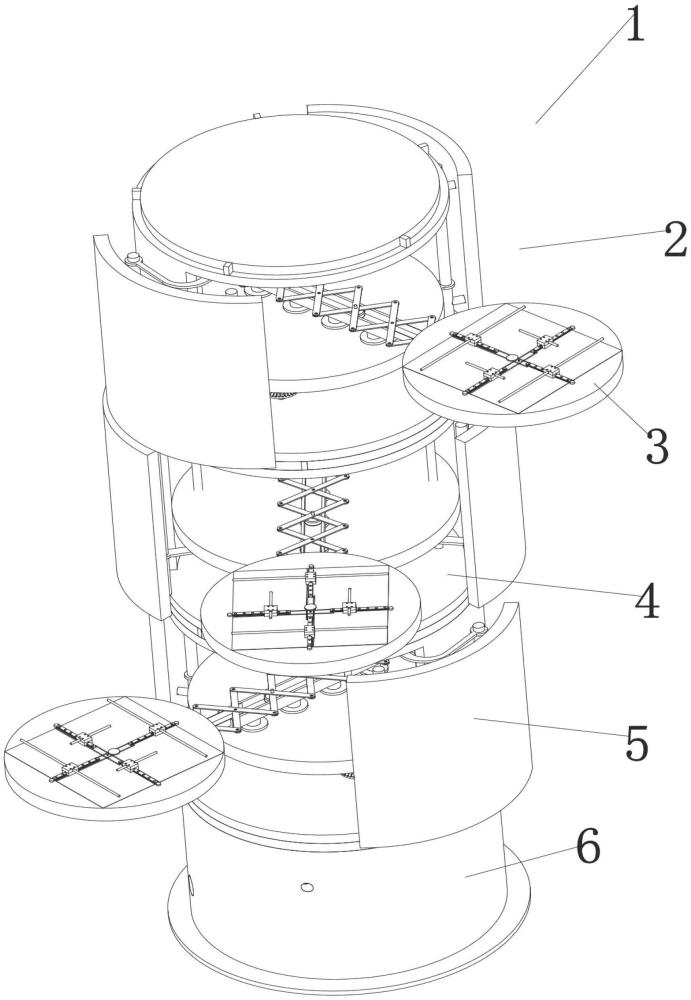
3、本实用新型提供一种基于模块化设计的多旋翼无人机机巢,包括上下堆叠的至少两层用于储存无人机的无人机舱体,任意一所述无人机舱体内均设有用于停放无人机的停机坪,所述停机坪用于供无人机顺利起降,所述停机坪与停机坪移动机构相连,所述停机坪移动机构用于带动所述停机坪进出所述无人机舱体,所述无人机舱体的侧面具有供无人机进出的开口,所述开口处设有用于控制所述开口开闭的舱门。
4、优选的,相邻所述无人机舱体之间为卡接连接或插接连接。
5、优选的,相邻所述无人机舱体的开口在上下方向上错位设置,以避免相邻所述无人机舱体同时起降无人机时产生干涉。
6、优选的,所述无人机舱体包括顶板、底板,两端分别与所述顶板、所述底板相连的侧壁,位于所述顶板和所述底板之间的承载板,所述承载板上设有所述停机坪和所述停机坪移动机构。
7、优选的,所述停机坪移动机构包括旋转驱动机构,所述旋转驱动机构的输出轴与凸轮相连,所述凸轮与t型杆的底端滑动连接,所述t型杆的杆端与剪式伸缩架一端的铰接点相连,所述剪式伸缩架另一端的铰接点与所述停机坪相连,所述剪式伸缩架与位于所述无人机舱体内的直线滑轨滑动连接。
8、优选的,所述停机坪移动机构包括旋转驱动机构,所述旋转驱动机构的输出轴通过连杆与所述停机坪相连,所述旋转驱动机构的输出轴相对于所述无人机舱体的轴线偏心设置,以使得所述旋转驱动机构带动所述停机坪从所述出口移出。
9、优选的,所述无人机舱体为圆柱体,所述舱门为开设在所述侧壁上的对开式舱门,所述舱门在关闭时可构成所述侧壁的一部分。
10、优选的,所述舱门的驱动机构位于所述无人机舱体的内部,所述舱门的驱动机构包括与所述舱门内侧相连的舱门连杆、舱门曲柄,所述舱门连杆远离所述舱门的一端通过转动杆与旋转驱动装置相连,所述舱门曲柄远离所述舱门的一端连接有沿上下方向设置的转动轴,所述转动杆与所述转动轴均设置于所述底板上,所述转动轴、所述舱门曲柄、所述舱门、所述舱门连杆、所述转动杆与所述底板形成四连杆机构,以将所述舱门的旋转开合转化为平移开合。
11、优选的,所述停机坪上设有用于为无人机充电的充电区,以及用于将落至所述停机坪上的无人机移至所述充电区内的归中机构,所述归中机构包括位于所述充电区的周边的多根推杆,以及带动所述推杆朝向所述充电区运动的推杆驱动机构。
12、优选的,所述基于模块化设计的多旋翼无人机机巢还包括位于最底层的所述无人机舱体下方的底座,所述底座的顶部与最底层的所述无人机舱体的底部相连,所述底座内设有用于为所述无人机舱体供电的电源。
13、本实用新型相对于现有技术取得了以下技术效果:
14、本实用新型采用将至少两层无人机舱体上下堆叠设置,且无人机舱体内设有用于停放无人机的停机坪,无人机舱体的侧部具有开口的方式,使得基于模块化设计的多旋翼无人机机巢在水平方向占用面积较小的情况下,便可实现多架无人机的同时起降,提高了无人机进行测绘、巡检、运输等任务的工作效率;同时还采用在每层无人机舱体的开口处设有舱门的方式,使得当部分层无人机舱体的舱门或停机坪发生故障时,其余层的无人机仍可不受影响、顺利起降,从而进一步保证无人机进行测绘、巡检、运输等任务具有较高的工作效率。
技术特征:1.一种基于模块化设计的多旋翼无人机机巢,其特征在于,包括上下堆叠的至少两层用于储存无人机的无人机舱体,任意一所述无人机舱体内均设有用于停放无人机的停机坪,所述停机坪用于供无人机顺利起降,所述停机坪与停机坪移动机构相连,所述停机坪移动机构用于带动所述停机坪进出所述无人机舱体,所述无人机舱体的侧面具有供无人机进出的开口,所述开口处设有用于控制所述开口开闭的舱门。
2.根据权利要求1所述的基于模块化设计的多旋翼无人机机巢,其特征在于,相邻所述无人机舱体之间为卡接连接或插接连接。
3.根据权利要求1所述的基于模块化设计的多旋翼无人机机巢,其特征在于,相邻所述无人机舱体的开口在上下方向上错位设置,以避免相邻所述无人机舱体同时起降无人机时产生干涉。
4.根据权利要求1所述的基于模块化设计的多旋翼无人机机巢,其特征在于,所述无人机舱体包括顶板、底板,两端分别与所述顶板、所述底板相连的侧壁,位于所述顶板和所述底板之间的承载板,所述承载板上设有所述停机坪和所述停机坪移动机构。
5.根据权利要求1-4任一项所述的基于模块化设计的多旋翼无人机机巢,其特征在于,所述停机坪移动机构包括旋转驱动机构,所述旋转驱动机构的输出轴与凸轮相连,所述凸轮与t型杆的底端滑动连接,所述t型杆的杆端与剪式伸缩架一端的铰接点相连,所述剪式伸缩架另一端的铰接点与所述停机坪相连,所述剪式伸缩架与位于所述无人机舱体内的直线滑轨滑动连接。
6.根据权利要求1-4任一项所述的基于模块化设计的多旋翼无人机机巢,其特征在于,所述停机坪移动机构包括旋转驱动机构,所述旋转驱动机构的输出轴通过连杆与所述停机坪相连,所述旋转驱动机构的输出轴相对于所述无人机舱体的轴线偏心设置,以使得所述旋转驱动机构带动所述停机坪从所述开口移出。
7.根据权利要求4所述的基于模块化设计的多旋翼无人机机巢,其特征在于,所述无人机舱体为圆柱体,所述舱门为开设在所述侧壁上的对开式舱门,所述舱门在关闭时可构成所述侧壁的一部分。
8.根据权利要求7所述的基于模块化设计的多旋翼无人机机巢,其特征在于,所述舱门的驱动机构位于所述无人机舱体的内部,所述舱门的驱动机构包括与所述舱门内侧相连的舱门连杆、舱门曲柄,所述舱门连杆远离所述舱门的一端通过转动杆与旋转驱动装置相连,所述舱门曲柄远离所述舱门的一端连接有沿上下方向设置的转动轴,所述转动杆与所述转动轴均设置于所述底板上,所述转动轴、所述舱门曲柄、所述舱门、所述舱门连杆、所述转动杆与所述底板形成四连杆机构,以将所述舱门的旋转开合转化为平移开合。
9.根据权利要求1-4、7、8中任一项所述的基于模块化设计的多旋翼无人机机巢,其特征在于,所述停机坪上设有用于为无人机充电的充电区,以及用于将落至所述停机坪上的无人机移至所述充电区内的归中机构,所述归中机构包括位于所述充电区的周边的多根推杆,以及带动所述推杆朝向所述充电区运动的推杆驱动机构。
10.根据权利要求9所述的基于模块化设计的多旋翼无人机机巢,其特征在于,所述基于模块化设计的多旋翼无人机机巢还包括位于最底层的所述无人机舱体下方的底座,所述底座的顶部与最底层的所述无人机舱体的底部相连,所述底座内设有用于为所述无人机舱体供电的电源。
技术总结本技术公开一种基于模块化设计的多旋翼无人机机巢,涉及无人机技术领域;包括上下堆叠的至少两层无人机舱体,任意一无人机舱体内均设有停机坪,停机坪与停机坪移动机构相连,无人机舱体的侧面具有开口,开口处设有舱门;本技术中至少两层的无人机舱体堆叠设置,每层无人机舱体内设有用于停放无人机的停机坪,这使得基于模块化设计的多旋翼无人机机巢在水平方向上占用面积较小的情况下,可实现多架无人机的同时起降,提高了无人机进行测绘、巡检、运输等任务的工作效率;每层无人机舱体均设有舱门,当部分层无人机舱体的舱门或停机坪发生故障时,其余层的无人机仍可顺利起降,保证无人机进行测绘、巡检、运输等任务具有较高的工作效率。技术研发人员:李志诚,易建军,吴卓阳,初义昊,邹韩菡,陈勇受保护的技术使用者:华东理工大学技术研发日:20230928技术公布日:2024/5/10本文地址:https://www.jishuxx.com/zhuanli/20240722/220559.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表