一种压电电机驱动全电微型飞行器系统
- 国知局
- 2024-08-01 05:38:57
本发明属于无人机,具体涉及一种压电电机驱动全电微型飞行器系统。
背景技术:
1、二十世纪90年代首次提出了微型飞行器(mav)的概念,其特点是体积小、重量轻、隐蔽性好、成本低且便于携带,不但适于单机操控,还有利于集群协同操控,可实现狭小和开阔空间的探测、监视、追踪以及通信中继应用,也可实现武装攻击或干扰压制等方面的应用,由此,无论在民用领域还是在军事领域,mav均具有非常重要的应用前景和价值。
2、但是由于mav尺寸小,负载能力有限,所带能源受到限制,航时较短,因此限制了mav的进一步推广应用,目前传统的mav大都采用电磁电机驱动,由于电磁电机的特性,其续航能力和效率在小体积下普遍不高,如mlb公司的trochoid飞行器续航时间为18min,美国海军研究院的mite飞行器续航时间为20min,美国航空环境公司的black widow飞行器续航时间为30~33min,均不能令人满意;传统的微型飞行器还需携带一个笨重的控制器,同时使得其便携性和隐蔽性大大降低。
3、对mav而言,动力装置的体积、重量、性能和效率对mav体积、性能和续航能力的影响非常大,动力装置的创新,往往会带来mav的创新。
4、因此,有必要设计一种压电电机驱动全电微型飞行器系统,以提升微型飞行器的续航、效率和隐蔽性。
技术实现思路
1、本发明的目的在于提供一种压电电机驱动全电微型飞行器系统,以解决上述的问题。
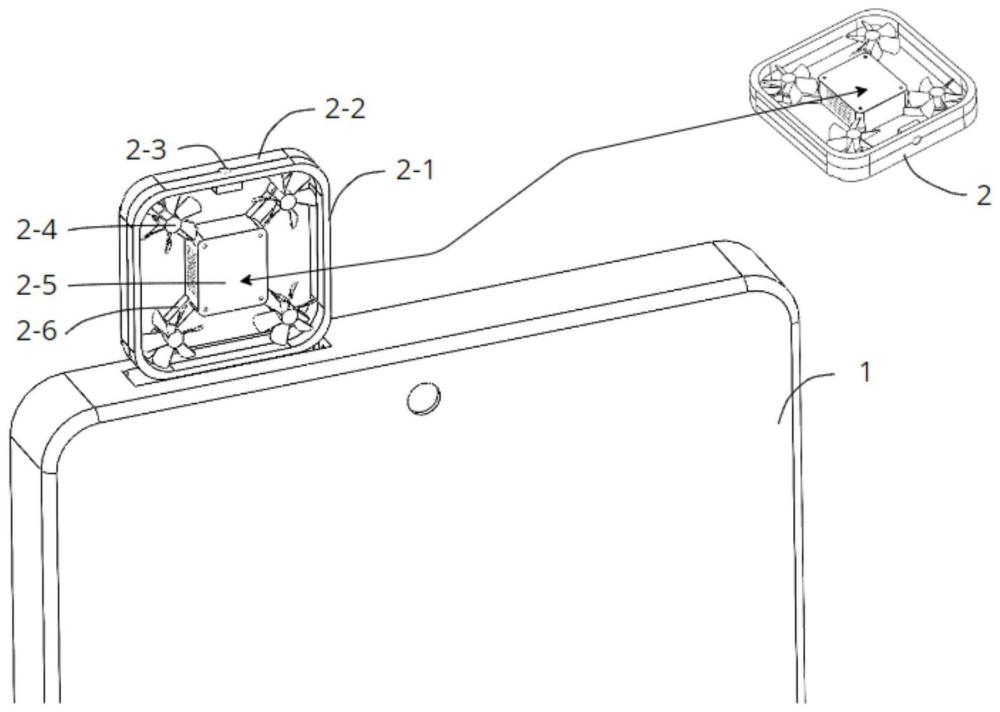
2、为实现上述目的,本发明提供如下技术方案:一种压电电机驱动全电微型飞行器系统,包括手机和微型飞行器,所述微型飞行器包括上框架、下框架和动力系统,上框架和下框架均为一种夹层式储能电池结构,所述上框架四周上包括四个中控通道作为储能电池安装用于对动力系统和控制系统提供能量;
3、所述动力系统包括螺旋桨和压电电机,四个所述螺旋桨由压电电机驱动且左右两侧对称,翼型方向相反,四个压电电机均匀分布在中空通道的空腔内并分别通过三个螺栓连接固定;
4、所述压电电机包括定子,所述定子上设置有压电陶瓷组,所述定子顶部设置有轴承;
5、所述定子包括柱形杆和金属基底组成;
6、所述压电陶瓷组由四块压电陶瓷片组成并且呈环形阵列于柱形杆外侧,四块所述压电陶瓷片两两一组并且每组的两个陶瓷片对向设置,构成压电陶瓷组的a相与b相并且每一相的压电陶瓷沿径向方向极化且每一相的两个陶瓷片极化方向相同。
7、优选的,所述轴承包括轴承内圈和轴承外圈,所述轴承内圈与柱形杆顶部外圈固定连接。
8、优选的,所述压电陶瓷组a相具体为对向设置的陶瓷片和陶瓷片组成,所述压电陶瓷组b相具体为对向设置的陶瓷片和陶瓷片组成。
9、优选的,所述金属基底上开设有通孔并且通过通孔与外部固定连接,所述金属基底与柱形杆为一体化设置并且柱形体与金属基底同轴。
10、优选的,所述压电陶瓷组的连接方式包括通过环氧树脂固定贴合在四边削平的柱形杆上。
11、优选的,还包括外框架、导航系统、控制系统和底架,所述上框架和下框架上下对称分布通过卡扣和螺栓连接,外框架作为储能电池结构的正极,内框架作为储能电池结构的负极,玻璃纤维织物和多功能电解质填充在中间夹层,所述上框架和下框架右侧均粘贴有摩擦片,所述上框架后部贴有磁性块并且底部两侧均设置有平行滑块;
12、所述底架通过螺栓将底架的中空通道与下框架连接固定,且底架中部两侧开有散热孔,所述底架上设置有盖板并且两者通过螺栓固定连接。
13、优选的,所述控制系统通过螺栓固定在底架中部空腔内,所述控制系统包括加速度计、处理器、陀螺仪、wifi连接与数据传输模块和电子调速器组成并集成在两个电路板中,并通过下框架中部的螺栓进行连接固定。
14、优选的,所述导航系统包括gps、第一摄像头和第二摄像头组成,其中第一摄像头通过螺栓固定于底架底部,第二摄像头通过螺栓固定于上框架与下框架前部,所述第一摄像头和第二摄像头均搭载压电电机驱动光学组件。
15、优选的,所述手机顶部开有一个空腔以容纳微型飞行器,空腔下部设置有两个平行的滑块并与微型飞行器上的两个平行滑轨连接,空腔底部有第一接口和磁吸机构分别与微型飞行器的第二接口和磁性块连接,左侧安装直线型压电电机且与微型飞行器左侧的摩擦片相连接。
16、本发明的技术效果和优点:
17、1、飞行器动力系统采用一种新型微型高转速压电电机,与传统的电磁电机相比,具有小体积下效率高、旋转速度快、结构简单易于集成以及抗电磁干扰能力强的优点;
18、2.充分利用压电电机微型化发展的优势,将微型飞行器内置于手机中,与手机进行集成,可实现飞行器为手机充电,并采用手机app,实现对飞行器的飞行控制和数据接收,大幅增加飞行器使用的便携性、便利性与隐蔽性;
19、3.采用结构储能一体化技术,将微型飞行器的框架结构设计为储能结构,不需要另外增加电池安放空间,大大精简了微型飞行器结构,减轻了重量,结合压电电机微型化高效率优势,以期大幅提升微型飞行器的续航能力;
20、4.突破传统使用音圈电机实现微型相机镜头调焦和稳像功能在体积、行程和功耗方面的发展瓶颈,利用压电电机结构简单易于集成、高精度、低功耗和快响应的特点,将微型飞行器的摄像头搭载压电电机驱动光学组件,可以实现摄像头的大焦距范围调整,大幅提升飞行器的探测距离;
21、5.最后,将节省出来的电池安放空间设计为可更换模块,从而使得飞行器易于实现功能的多样化。
技术特征:1.一种压电电机驱动全电微型飞行器系统,包括手机(1)和微型飞行器(2),所述微型飞行器(2)包括上框架(2-1)、下框架(2-2)和动力系统(2-4),其特征在于:上框架(2-1)和下框架(2-2)均为一种夹层式储能电池结构,所述上框架(2-2)四周上包括四个中控通道(2-2-6)作为储能电池安装用于对动力系统和控制系统提供能量;
2.根据权利要求1所述的一种压电电机驱动全电微型飞行器系统,其特征在于:所述轴承包括轴承内圈(2-4-25)和轴承外圈(2-4-26),所述轴承内圈(2-4-25)与柱形杆(2-4-23)顶部外圈固定连接。
3.根据权利要求1所述的一种压电电机驱动全电微型飞行器系统,其特征在于:四块所述压电陶瓷片具体为陶瓷片(2-4-27)、陶瓷片(2-4-28)、陶瓷片(2-4-29)和陶瓷片(2-4-30),所述压电陶瓷组a相具体为对向设置的陶瓷片(2-4-27)和陶瓷片(2-4-30)组成,所述压电陶瓷组b相具体为对向设置的陶瓷片(2-4-28)和陶瓷片(2-4-29)组成。
4.根据权利要求1所述的一种压电电机驱动全电微型飞行器系统,其特征在于:所述金属基底(2-4-24)上开设有通孔并且通过通孔与外部固定连接,所述金属基底(2-4-24)与柱形杆(2-4-23)为一体化设置并且柱形体(2-4-23)与金属基底(2-4-24)同轴。
5.根据权利要求1所述的一种压电电机驱动全电微型飞行器系统,其特征在于:所述压电陶瓷组的连接方式包括通过环氧树脂固定贴合在四边削平的柱形杆(2-4-23)上。
6.根据权利要求1所述的一种压电电机驱动全电微型飞行器系统,其特征在于:还包括外框架(2-2-4)、导航系统(2-3)、控制系统(2-5)和底架(2-6),所述上框架(2-1)和下框架(2-2)上下对称分布通过卡扣和螺栓连接,外框架(2-2-4)作为储能电池结构的正极,内框架(2-2-6)作为储能电池结构的负极,玻璃纤维织物和多功能电解质填充在中间夹层(2-2-5),所述上框架(2-1)和下框架(2-2)右侧均粘贴有摩擦片(2-2-3),所述上框架后部贴有磁性块(2-1-1)并且底部两侧均设置有平行滑块(2-2-1);
7.根据权利要求6所述的一种压电电机驱动全电微型飞行器系统,其特征在于:所述控制系统(2-5)通过螺栓固定在底架(2-6)中部空腔内,所述控制系统包括加速度计(2-5-1)、处理器(2-5-2)、陀螺仪(2-5-3)、wifi连接与数据传输模块(2-5-4)和电子调速器(2-5-5)组成并集成在两个电路板中,并通过下框架(2-2)中部的螺栓进行连接固定。
8.根据权利要求6所述的一种压电电机驱动全电微型飞行器系统,其特征在于:所述导航系统包括gps(2-3-1)、第一摄像头(2-3-2)和第二摄像头(2-3-3)组成,其中第一摄像头(2-3-2)通过螺栓固定于底架(2-6)底部,第二摄像头(2-3-3)通过螺栓固定于上框架(2-1)与下框架(2-2)前部,所述第一摄像头(2-3-2)和第二摄像头(2-3-3)均搭载压电电机驱动光学组件。
9.根据权利要求1所述的一种压电电机驱动全电微型飞行器系统,其特征在于:所述手机(1)顶部开有一个空腔以容纳微型飞行器(2),空腔下部设置有两个平行的滑块(1-1)并与微型飞行器(2)上的两个平行滑轨(2-2-1)连接,空腔底部有第一接口(1-4)和磁吸机构(1-3)分别与微型飞行器(2)的第二接口(2-2-2)和磁性块(2-1)连接,左侧安装直线型压电电机(1-2)且与微型飞行器左侧的摩擦片(2-2-3)相连接。
技术总结本发明公开了一种压电电机驱动全电微型飞行器系统,包括手机和微型飞行器,所述微型飞行器由上框架、下框架、导航系统、动力系统、控制系统、底架组成,所述上框架与下框架为一种夹层结构,通过卡扣连接,作为储能结构通过底架的中空通道为动力系统和控制系统提供能量,且框架右侧贴有摩擦片,所述下框架通过螺钉与底架的中空通道连接,所述微型飞行器的动力系统采用一种新型微型高转速压电电机,且压电电机均匀分布在中空通道的空腔内,所述导航系统中的两个摄像头分别固定在框架前部与底架底部,所述控制系统位于底架中部的空腔内,所述手机顶部开有空腔用于容纳微型飞行器。技术研发人员:时运来,王君涵,郭佳鑫,何召慧受保护的技术使用者:南京航空航天大学技术研发日:技术公布日:2024/5/16本文地址:https://www.jishuxx.com/zhuanli/20240722/220831.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表