一种可适应复杂地形的无人机起落装置
- 国知局
- 2024-08-01 05:56:42
本技术涉及无人机,具体为一种可适应复杂地形的无人机起落装置。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机的起落装置是无人机装置中很重要的部分,其对无人机的作用就像腿和脚对于人的作用一样,所以起落装置的性能,决定了无人机起落的稳定性。
2、目前大多数无人机的起落装置都是固定且僵硬的,此种起落装置无法起到有效的缓冲,在复杂地形工作的时候也无法保证无人机起落的平稳。如公开号cn216734747u的中国专利公开了一种无人机减震起落架。本发明提供了如下技术方案:一种新型无人机起落装置,其结构包括信号接收器、无人机主体、无人机底座、主摄像机、连接杆、起落架、支撑臂、辅助摄像头、旋转电机、旋翼、减震杆。当无人机降落时起落架下压上支座,同时底部阀关闭,压力空间会变小,使得油液缓缓向上移动,所产生的的振动被移动的油液慢慢吸收,以达到缓冲减震的效果,且减震杆安全可靠,可保证无人机飞行的平稳性。但是其不能适用于所有工作环境,当在较为复杂的地形工作时,该起落架无法使无人机平稳的降落,因此存在适用范围小,在复杂地形时平稳性和缓冲性差的问题。
3、因此,亟需一种能适应复杂地形的起落装置来辅助无人机完成起落。
技术实现思路
1、本部分的目的在于概述本实用新型的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、鉴于上述和/或现有一种可适应复杂地形的无人机起落装置中存在的问题,提出了本实用新型。
3、为解决上述技术问题,根据本实用新型的一个方面,本实用新型提供了如下技术方案:
4、一种可适应复杂地形的无人机起落装置,其包括,
5、无人机;
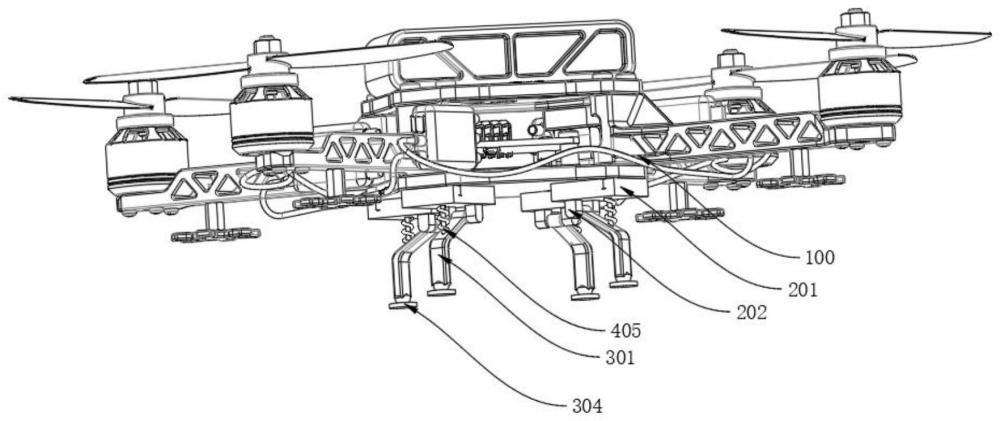
6、连接机构,设置于无人机底面,且共有n个,n≥3;
7、支撑机构,设置于连接机构上;
8、缓冲机构,一端设置于连接机构上,另一端与支撑机构相连;
9、当支撑机构与底面接触时,所述支撑机构在连接机构上转动,以完成对缓冲机构的挤压动作,且所述支撑机构与地面的接触面发生形变,以完成贴合动作。
10、作为本实用新型所述的一种可适应复杂地形的无人机起落装置的一种优选方案,其中,所述连接机构包括,
11、连接块,设置于无人机底面;
12、转动槽,设置于连接块底面。
13、作为本实用新型所述的一种可适应复杂地形的无人机起落装置的一种优选方案,其中,所述支撑机构包括,
14、支撑腿,设置于转动槽上;
15、球形块,设置于支撑腿远离转动槽端;
16、球形槽,设置于球形块外周侧;
17、脚杯,设置于球形槽外周侧。
18、作为本实用新型所述的一种可适应复杂地形的无人机起落装置的一种优选方案,其中,所述缓冲机构包括,
19、密封槽,设置于连接块上;
20、活动杆,设置于密封槽内,且能在密封槽内上下往复移动;
21、摩擦块,设置于活动杆位于密封槽内外周侧;
22、活塞,设置于密封块底面;
23、弹簧杆,一端设置于密封槽外周侧上,另一端设置于活动杆外周侧上。
24、作为本实用新型所述的一种可适应复杂地形的无人机起落装置的一种优选方案,其中,所述脚杯外周侧包裹有防滑垫。
25、作为本实用新型所述的一种可适应复杂地形的无人机起落装置的一种优选方案,其中,所述密封槽能在连接块上转动,所述活动杆设置在支撑腿上,且能在支撑腿上转动。
26、与现有技术相比:
27、1、适应复杂地形:由于支撑机构和缓冲机构的设计,能够自动调整以适应不平整的地形,这使得无人机在各种复杂地形上都能稳定起落。
28、2、缓冲降落冲击:当无人机降落时,支撑机构转动压缩缓冲机构,利用压缩空气、摩擦力以及弹簧杆的弹力去缓冲无人机的惯性,让其可以平稳降落。
29、3、防滑设计:脚杯外周侧包裹有防滑垫,这样无人机在接触地面时,可以降低滑动的可能,增加稳定性。
30、4、球形接触设计:支撑腿末端的球形块和脚杯配合,形成一个可以在多个方向上转动的接触点,这样可以使得无人机在不平整地面上保持稳定。
31、5、提高了无人机的使用寿命:由于缓冲机构可以有效地缓解降落时的冲击力,因此可以降低无人机在降落过程中受到的损伤,从而提高了无人机的使用寿命。
技术特征:1.一种可适应复杂地形的无人机起落装置,其特征在于,包括:
2.根据权利要求1所述的一种可适应复杂地形的无人机起落装置,其特征在于,所述连接机构(200)包括,
3.根据权利要求2所述的一种可适应复杂地形的无人机起落装置,其特征在于,所述支撑机构(300)包括,
4.根据权利要求3所述的一种可适应复杂地形的无人机起落装置,其特征在于,所述缓冲机构(400)包括,
5.根据权利要求3所述的一种可适应复杂地形的无人机起落装置,其特征在于,所述脚杯(304)外周侧包裹有防滑垫。
6.根据权利要求4所述的一种可适应复杂地形的无人机起落装置,其特征在于,所述密封槽(401)能在连接块(201)上转动,所述活动杆(402)设置在支撑腿(301)上,且能在支撑腿(301)上转动。
技术总结本技术公开一种可适应复杂地形的无人机起落装置包括无人机;连接机构,设置于无人机底面,且共有N个,N≥3;支撑机构,设置于连接机构上;缓冲机构,一端设置于连接机构上,另一端与支撑机构相连;当支撑机构与底面接触时,所述支撑机构在连接机构上转动,以完成对缓冲机构的挤压动作,且所述支撑机构与地面的接触面发生形变,以完成贴合动作,整个装置由于支撑机构和缓冲机构的设计,能够自动调整以适应不平整的地形,这使得无人机在各种复杂地形上都能稳定起落。技术研发人员:陈晓明,孟浩民,王君,张梓琪,丁尘磊,王德华,于佳琪,李俊辰,唐娜,房杰祥,金雪峰,黄源浩,胡尊严,吴逸舟,刘秋伟,张雅杰,韩正昊,汪维受保护的技术使用者:吉林农业大学技术研发日:20231213技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/222061.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表