一种全景拍摄无人机及其拍摄方法与流程
- 国知局
- 2024-08-01 05:57:07
本发明涉及无人机,具体为一种全景拍摄无人机及其拍摄方法。
背景技术:
1、众所周知,无人机是通过无线电遥控设备或机载计算机程控系统进行操控的不载人飞行器,并且使用计算机能够对拍摄到的图像信息进行处理,从而能够按照一定精度要求制作成图像;由于无人机航拍影像具有高清晰、大比例尺、小面积、高现势性的优点,因此特别适合获取带状地区航拍影像;无人机航拍摄影技术可广泛应用于生态环境保护、矿产资源勘探、海洋环境监测、土地利用调查、水资源开发、农作物长势监测与估产、农业作业、自然灾害监测与评估、城市规划与市政管理、森林病虫害防护与监测、公共安全、数字地球以及广告摄影等领域,有着广阔的市场需求。
2、现有的航拍无人机在使用时通常会搭配360度全景摄像头进行全景拍摄,但360度全景摄像头在无人机上拆装时需要通过拧动多组螺栓,从而导致了拆装过程较为费时费力,进而影响到全景摄像头在无人机上进行检修更换时的方便性;另外,现有的无人机全景拍摄方法在应用时由于缺乏起飞前的安全检测步骤,从而导致了无人机全景拍摄方法的安全性也有待提升;为此,我们提出一种全景拍摄无人机及其拍摄方法。
技术实现思路
1、本发明的目的在于提供一种全景拍摄无人机及其拍摄方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种全景拍摄无人机,包括:无人机本体和拆装机构;
3、所述无人机本体的底部设置有360度全景摄像头;
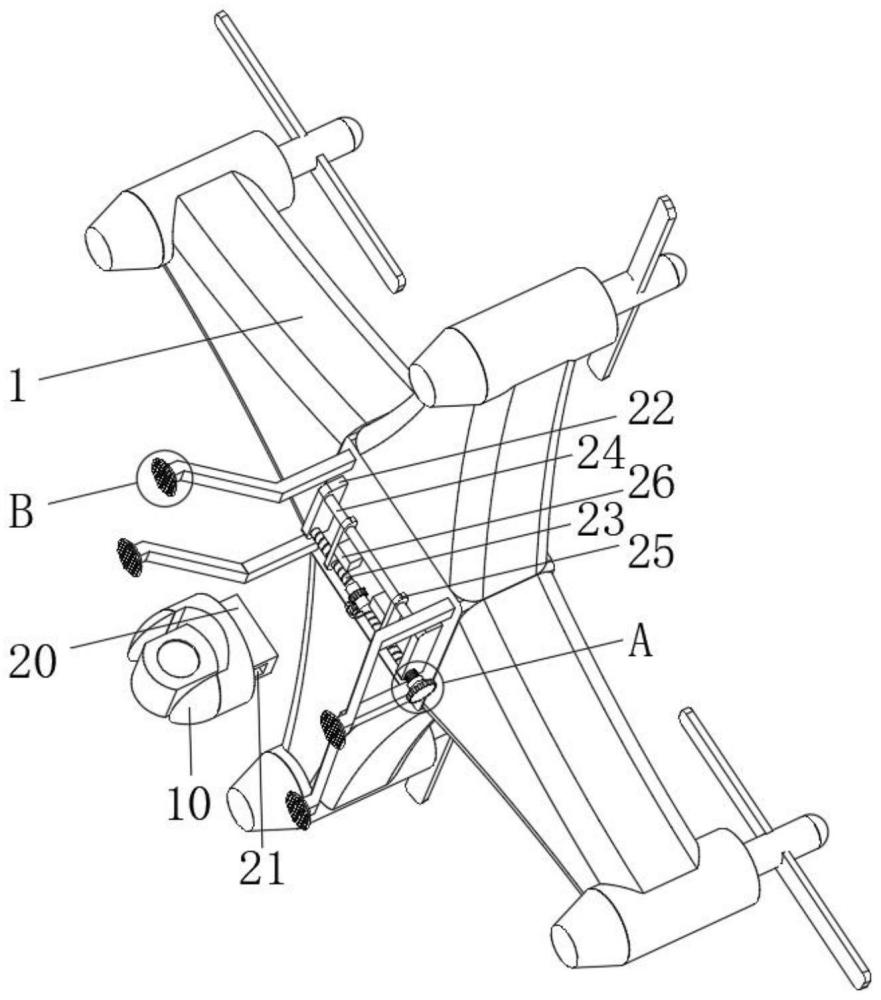
4、所述拆装机构包括固定连接在360度全景摄像头支架上的连接块以及固定连接在无人机本体底部的挡板,所述连接块的两侧对称开设有插槽,所述挡板的数量为两个,两个所述挡板的内部均转动连接有双向丝杆,所述双向丝杆两段相反的螺纹上均螺纹套装有活动板,所述活动板的内部滑动连接有滑杆,所述滑杆的两端均与挡板固定连接,所述活动板的数量为两个,两个所述活动板相背的一侧均固定连接有用于插入至插槽中的插块,所述双向丝杆的一端固定连接有挡块,所述双向丝杆上套装有扭簧,所述扭簧的两端分别与挡块以及其中一个所述挡板固定连接。
5、通过采用上述技术方案,无人机本体起飞后能够通过360度全景摄像头进行全景拍摄;另外当需要对360度全景摄像头进行拆卸时,能够先通过逆时针转动挡块的方式带动双向丝杆转动,从而使两个活动板能够在双向丝杆作用下于滑杆上进行相互远离的移动,进而使插块能够在活动板作用下从插槽中移出,进而便于将连接块和360度全景摄像头从无人机本体上取下。
6、优选的,所述挡块远离双向丝杆的一侧固定连接有手轮,所述手轮的外侧均匀固定连接有等距分布的第二凸块。
7、通过采用上述技术方案,能够更加方便地通过挡块对双向丝杆进行转动。
8、优选的,所述无人机本体的底部均匀固定连接有等距分布的支撑腿,所述支撑腿的底部固定连接有支撑块。
9、通过采用上述技术方案,能够使无人机本体在返航落地时保持平稳,从而避免360度全景摄像头与降落平台产生磕碰。
10、优选的,所述支撑块的底部均匀固定连接有等距分布的第一凸块。
11、通过采用上述技术方案,能够提升支撑块与降落平台之间的摩擦力,从而进一步提升无人机本体降落时的稳定性。
12、优选的,还包括定位机构,所述定位机构包括固定连接在无人机本体底部的支撑板以及固定套装在限位弹簧上的管体,所述管体上固定套装有齿轮,所述支撑板靠近齿轮的一侧固定连接有第一连接杆,所述第一连接杆的外壁滑动连接有用于插入至齿轮齿槽中的l形插板,所述第一连接杆上套装有限位弹簧,所述限位弹簧的两端分别与支撑板和l形插板固定连接。
13、通过采用上述技术方案,当双向丝杆在扭簧作用下通过活动板带动插块插入至插槽中对连接块进行初步定位后,能够通过松开l形插板的方式使l形插板在限位弹簧的张紧力量作用下于第一连接杆上朝着靠近齿轮的方向移动,从而使l形插板能够插入至齿轮上对应的齿槽中,进而提升了360度全景摄像头在无人机本体上安装后的牢固性。
14、优选的,所述l形插板的一侧固定连接有拉耳。
15、通过采用上述技术方案,能够便于在拆卸360度全景摄像头时对l形插板进行拉动。
16、优选的,所述l形插板的内部滑动连接有第二连接杆,所述第二连接杆的一端与支撑板固定连接。
17、通过采用上述技术方案,能够使l形插板移动时保持平稳。
18、另外,本发明还提供了一种全景拍摄无人机的拍摄方法,包括以下步骤:
19、步骤一、在无人机本体的遥控器以及电池电量进行检查,并确保无人机本体已插入微型安全数码储存卡;
20、步骤二、检查周围环境是否满足无人机本体的飞行条件以及360度全景摄像头的拍摄条件后,将无人机本体的机翼展开,再启动无人机本体和360度全景摄像头的电源开关,同时通过显示器检查飞行状态列表对指南针进行矫正;
21、步骤三、在高处将无人机本体移动至合适位置,并使用360度全景摄像头进行全景拍摄,拍摄照片时使无人机本体处于定点悬停状态,以保持拍摄画面的清晰度;
22、步骤四、拍摄完成后,通过遥控器控制无人机本体返航至指定位置。
23、优选的,在步骤三中,为了提升无人机本体拍摄时的安全性,在无人机本体横向移动飞行时,通过遥控器控制360度全景摄像头进行旋转,以维持无人机本体飞行时的稳定。
24、综上所述,本申请包括以下至少一种有益技术效果:
25、本全景拍摄无人机通过在无人机本体上设置拆装机构,使双向丝杆逆时针转动后能够带动两个活动板相互远离,从而使插块能够从插槽中移出,进而便于对360度全景摄像头进行快速拆装,使360度全景摄像头在进行检修更换时更加方便;另外,全景拍摄无人机的拍摄方法通过检查飞行状态列表以及指南针矫正等步骤的设置,有效提升了无人机全景拍摄时的安全性。
技术特征:1.一种全景拍摄无人机,其特征在于,包括:无人机本体(1)和拆装机构(2);
2.根据权利要求1所述的一种全景拍摄无人机,其特征在于:所述挡块(28)远离双向丝杆(23)的一侧固定连接有手轮(29),所述手轮(29)的外侧均匀固定连接有等距分布的第二凸块(201)。
3.根据权利要求1所述的一种全景拍摄无人机,其特征在于:所述无人机本体(1)的底部均匀固定连接有等距分布的支撑腿(11),所述支撑腿(11)的底部固定连接有支撑块(12)。
4.根据权利要求3所述的一种全景拍摄无人机,其特征在于:所述支撑块(12)的底部均匀固定连接有等距分布的第一凸块(13)。
5.根据权利要求1所述的一种全景拍摄无人机,其特征在于:还包括定位机构(3),所述定位机构(3)包括固定连接在无人机本体(1)底部的支撑板(30)以及固定套装在限位弹簧(33)上的管体(36),所述管体(36)上固定套装有齿轮(37),所述支撑板(30)靠近齿轮(37)的一侧固定连接有第一连接杆(31),所述第一连接杆(31)的外壁滑动连接有用于插入至齿轮(37)齿槽中的l形插板(32),所述第一连接杆(31)上套装有限位弹簧(33),所述限位弹簧(33)的两端分别与支撑板(30)和l形插板(32)固定连接。
6.根据权利要求5所述的一种全景拍摄无人机,其特征在于:所述l形插板(32)的一侧固定连接有拉耳(34)。
7.根据权利要求6所述的一种全景拍摄无人机,其特征在于:所述l形插板(32)的内部滑动连接有第二连接杆(35),所述第二连接杆(35)的一端与支撑板(30)固定连接。
8.一种全景拍摄无人机的拍摄方法,其特征在于,包括以下步骤:
9.根据权利要求8所述的一种全景拍摄无人机的拍摄方法,其特征在于:在步骤三中,为了提升无人机本体(1)拍摄时的安全性,在无人机本体(1)横向移动飞行时,通过遥控器控制360度全景摄像头(10)进行旋转,以维持无人机本体(1)飞行时的稳定。
技术总结本发明公开了一种全景拍摄无人机及其拍摄方法,包括:无人机本体和拆装机构;所述无人机本体的底部设置有360度全景摄像头;所述拆装机构包括固定连接在360度全景摄像头支架上的连接块以及固定连接在无人机本体底部的挡板,所述连接块的两侧对称开设有插槽,所述挡板的数量为两个;本全景拍摄无人机通过在无人机本体上设置拆装机构,使双向丝杆逆时针转动后能够带动两个活动板相互远离,从而使插块能够从插槽中移出,进而便于对360度全景摄像头进行快速拆装,使360度全景摄像头在进行检修更换时更加方便;另外,本全景拍摄无人机的拍摄方法通过检查飞行状态列表以及指南针矫正等步骤的设置,有效提升了无人机全景拍摄时的安全性。技术研发人员:夏芝强受保护的技术使用者:杭州红制作影视传媒有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240722/222099.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表