一种基于嵌入式的无人机机巢及控制系统的制作方法
- 国知局
- 2024-08-01 06:01:52
本发明涉及无人机机巢,具体为一种基于嵌入式的无人机机巢及控制系统。
背景技术:
1、无人驾驶的飞机简称为“无人机”,英文缩写名称是“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机;近年来无人机技术迅速发展,无人机的使用场景越来越广泛,包括在地质勘探、农业、环境监测、野外搜救、建筑和土地测绘、电力巡检、交通监管、无人运输、娱乐和体育等方面的应用;但是对无人机的使用要求不断提高,尤其是在无人机的起降过程中仍然存在一些不足需要改善。
2、现有技术中,无人机在起飞和降落的过程中会产生地面效应,地面效应是指运动物体贴近地面运行时,可能会产生飞溅物或者产生风力,对周围的建筑物、车辆、人员造成一定的安全隐患,限制了周围地面活动,同时无人机旋翼转动时产生的空气流动,会对周围的空气质量造成一定的影响。
3、由于无人机大都采用电能驱动,受电池现有技术限制,以电池作为动能的无人机作业时间一般为30分钟或以下;因此无人机在进行短时间作业后都需要飞回人工所在地点更换电池或者对电池进行充电,然后才可以继续作业;由于需要人工紧密参与,导致无人机的综合使用成本增加,限制了无人机进一步的广泛使用,因此,本发明提供了一种基于嵌入式的无人机机巢及控制系统。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于嵌入式的无人机机巢及控制系统,解决了无人机受电池现有技术限制续航时间短的问题,或是需要人工参与增加综合实使用成本的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种基于嵌入式的无人机机巢,包括主框架和相对称的舱门,所述主框架上通过舱门驱动机构的运动实现舱门的打开与关闭操作,且位于主框架的内部通过设置有升降平台驱动机构使得升降平台移动,所述升降平台的顶部且位于舱门的下方设置有对中装置和对中装置驱动机构;
3、所述舱门驱动机构包括安装在主框架顶端的舱门驱动电机,且舱门驱动电机左右两侧的输出轴通过舱门驱动联轴器分别安装有舱门驱动动力连杆,且位于主框架的顶部安装有舱门驱动轴承座,舱门驱动动力连杆的端部与舱门驱动轴承座内部的转动轴承内圈衔接,并且位于舱门驱动动力连杆上固定有舱门驱动齿轮,而舱门的底部安装有舱门驱动齿条,驱动齿轮与舱门驱动齿条的表面啮合并在驱动齿轮转动时带动舱门移动;
4、位于舱门的底部安装有舱门驱动连接块,而驱动连接块的底部安装有舱门滑块,而主框架顶部内侧的沿口处安装有舱门导轨,且舱门导轨在舱门滑块上适配滑动并使得舱门进行左右侧水平移动操作。
5、优选的,所述舱门包括舱门盖和舱门板,且舱门板安装在舱门盖的顶部,而舱门盖的底部与舱门驱动齿条固定。
6、优选的,所述升降平台是由停机平台和三角形连接板组成,且停机平台安装在三角形连接板的顶部。
7、优选的,所述升降平台驱动机构包括安装在主框架内部的升降底座,位于升降底座的顶部安装有升降驱动电机,且升降驱动电机通过升降联轴器使得升降丝杆进行旋转操作,且三角形连接板的一侧安装有升降螺母连接块,所述升降丝杆与升降螺母连接块的内部螺纹连接;
8、位于三角形连接板的前后侧均安装有升降滑块,而升降底座的顶部安装有竖向的升降滑轨,且升降滑块在升降滑轨上进行竖向的滑动操作并使得升降平台进行竖直方向的移动。
9、优选的,所述对中装置包括滑动座,且滑动座在停机平台的滑动槽里面移动,且滑动座上穿过有钢带并覆盖在停机平台的滑动槽上,位于滑动座的一侧安装有对中推杆,且位于对中推杆上安装有弹簧顶针接驳底座。
10、优选的,所述对中装置驱动机构包括安装在停机平台底部的对中电机,且对中电机输出轴的一端通过对中联轴器固定连接有对中丝杆,且对中丝杆位于滑动座的滑动槽下方,所述对中丝杆的表面螺纹连接有对中螺母滑块,而对中螺母滑块的表面通过连接块与滑动座的底面衔接。
11、优选的,所述主框架内部放置有电控箱,电控箱内部安装有多种电器元器件;
12、且主框架的前侧镶嵌设置有控制区域,包括人机交互面板、控制按钮、急停和机巢状态显示灯,人机交互面板负责显示机巢操作控制程序,控制按钮、急停和机巢状态显示灯均电性安装在电控箱内部。
13、优选的,所述无人机机巢还包括与电控箱电性连接的气象站,且气象站由立柱、气象站电控箱、雨量传感器、风速传感器、空气质量传感器、气象站摄像头和地面站组成;
14、气象站电控箱安装在立柱上,接驳机巢的电源、通讯线,且雨量传感器、风速传感器、空气质量传感器、气象站摄像头和地面站均安装在立柱上且与气象站电控箱电性连接。
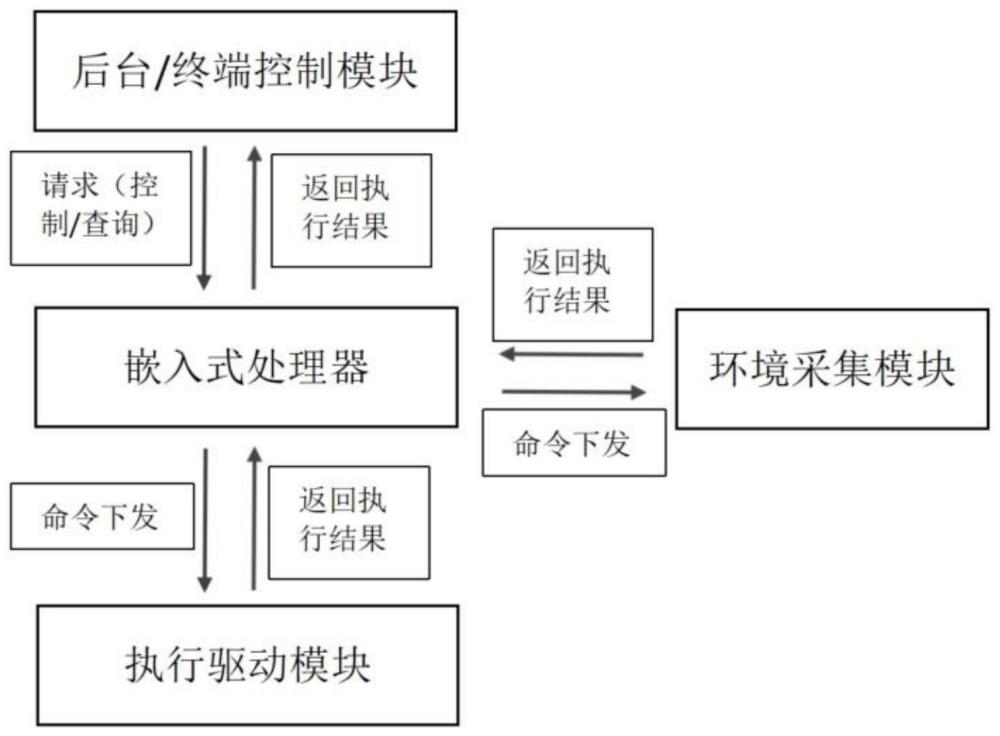
15、本发明还公开了一种基于嵌入式的无人机机巢的控制系统,控制系统包括:
16、嵌入式处理器,安装在电控箱内部,在控制系统作为控制中心,嵌入式处理器接收环境采集模块采集的数据,同时对接后台http协议的请求,请求分为控制请求、查询请求,依照内部程序分解命令后,对执行驱动模块内部的各单元传输控制协议,并将请求的执行结果返回给后台;
17、终端控制模块,由人机交互面板、控制按钮、急停组成,安装有windows系统,利用mobaxterm软件实现远程终端登录、postman软件实现http协议的接口调试、以及无人机的地面站控制程序和机巢控制程序;
18、执行驱动模块,由舱门驱动机构、升降平台驱动机构、对中装置驱动机构组成,承接嵌入式处理器分解后的命令,作为系统中各种动作的执行部分;
19、环境采集模块,包括气象站部分传感器:雨量传感器、风速传感器、空气质量传感器、气象站摄像头,以及舱内传感器:温湿度传感器、烟感报警器、水浸传感器和舱内摄像头,环境采集模块作为嵌入式处理的环境数据来源。
20、有益效果
21、本发明提供了一种基于嵌入式的无人机机巢及控制系统。与现有技术相比具备以下有益效果:
22、该基于嵌入式的无人机机巢及控制系统,通过设置有舱门,在内部设置有升降平台与对中装置,升降平台上设置有视觉引导标志,能够引导无人机准确的降落到无人机机巢的停机平台上,且对中装置能够夹紧无人机,使无人机移动到升降平台上的中间位置,方便进行无人机充电操作;该机巢使得无人机在使用过程中无需频繁地回到用户所在位置,降低了人工参与度,从而既提高了无人的使用效率,发挥了无人机最大的功用,同时又降低了无人机的综合使用成本;可广泛的布局在需要范围使用无人机无人值守的场合,形成合理的无人机布局网络覆盖,使用方便灵活。
技术特征:1.一种基于嵌入式的无人机机巢,包括主框架(1)和相对称的舱门(2),其特征在于:所述主框架(1)上通过舱门驱动机构(3)的运动实现舱门(2)的打开与关闭操作,且位于主框架(1)的内部通过设置有升降平台驱动机构(5)使得升降平台(4)移动,所述升降平台(4)的顶部且位于舱门(2)的下方设置有对中装置(6)和对中装置驱动机构(7);
2.根据权利要求1所述的一种基于嵌入式的无人机机巢,其特征在于:所述舱门(2)包括舱门盖(2-1)和舱门板(2-2),且舱门板(2-2)安装在舱门盖(2-1)的顶部,而舱门盖(2-1)的底部与舱门驱动齿条(3-6)固定。
3.根据权利要求1所述的一种基于嵌入式的无人机机巢,其特征在于:所述升降平台(4)是由停机平台(4-1)和三角形连接板(4-2)组成,且停机平台(4-1)安装在三角形连接板(4-2)的顶部。
4.根据权利要求3所述的一种基于嵌入式的无人机机巢,其特征在于:所述升降平台驱动机构(5)包括安装在主框架(1)内部的升降底座(5-1),位于升降底座(5-1)的顶部安装有升降驱动电机(5-2),且升降驱动电机(5-2)通过升降联轴器(5-3)使得升降丝杆(5-4)进行旋转操作,且三角形连接板(4-2)的一侧安装有升降螺母连接块(5-5),所述升降丝杆(5-4)与升降螺母连接块(5-5)的内部螺纹连接;
5.根据权利要求3所述的一种基于嵌入式的无人机机巢,其特征在于:所述对中装置(6)包括滑动座(6-1),且滑动座(6-1)在停机平台(4-1)的滑动槽里面移动,且滑动座(6-1)上穿过有钢带(6-4)并覆盖在停机平台(4-1)的滑动槽上,位于滑动座(6-1)的一侧安装有对中推杆(6-2),且位于对中推杆(6-2)上安装有弹簧顶针接驳底座(6-3),并位于停机平台(4-1)顶部的中心处安装有视觉引导板(6-5)。
6.根据权利要求5所述的一种基于嵌入式的无人机机巢,其特征在于:所述对中装置驱动机构(7)包括安装在停机平台(4-1)底部的对中电机(7-1),且对中电机(7-1)输出轴的一端通过对中联轴器(7-2)固定连接有对中丝杆(7-3),且对中丝杆(7-3)位于滑动座(6-1)的滑动槽下方,所述对中丝杆(7-3)的表面螺纹连接有对中螺母滑块(7-4),而对中螺母滑块(7-4)的表面通过连接块与滑动座(6-1)的底面衔接。
7.根据权利要求1所述的一种基于嵌入式的无人机机巢,其特征在于:所述主框架(1)内部放置有电控箱(8),电控箱(8)内部安装有多种电器元器件;
8.根据权利要求7所述的一种基于嵌入式的无人机机巢,其特征在于:所述无人机机巢还包括与电控箱(8)电性连接的气象站(10),且气象站(10)由立柱(10-1)、气象站电控箱(10-2)、雨量传感器(10-3)、风速传感器(10-4)、空气质量传感器(10-5)、气象站摄像头(10-6)和地面站(10-7)组成;
9.根据权利要求1-8任一项所述的一种基于嵌入式的无人机机巢的控制系统,其特征在于:控制系统包括:
技术总结本发明公开了一种基于嵌入式的无人机机巢及控制系统,包括主框架和相对称的舱门,本发明涉及无人机机巢技术领域。该基于嵌入式的无人机机巢及控制系统,通过升降平台上设置有视觉引导标志,能够引导无人机准确的降落到无人机机巢的停机平台上,且对中装置能够夹紧无人机,使无人机移动到升降平台上的中间位置,方便进行无人机充电操作;该机巢使得无人机在使用过程中无需频繁地回到用户所在位置,降低了人工参与度,从而既提高了无人的使用效率,发挥了无人机最大的功用,同时又降低了无人机的综合使用成本;可广泛的布局在需要范围使用无人机无人值守的场合,形成合理的无人机布局网络覆盖,使用方便灵活。技术研发人员:陈少安,马晋,王葆,张红彬,范海荣受保护的技术使用者:拓恒技术有限公司技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/222498.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表