一种可栖息的微型仿生扑翼飞行器
- 国知局
- 2024-08-01 06:03:02
本发明属于飞行机器人领域,具体涉及一种可栖息的微型仿生扑翼飞行器。
背景技术:
1、可悬停双扑翼机器人具有噪声小、机动性强、气动效率高等优势,具有较高的隐蔽性,适合侦测勘察等任务。然而,扑翼机器人的能耗问题尚未解决,其小体型决定其无法携带过多电池,限制了连续飞行的时间。代尔夫特理工大学的扑翼飞行机器人续航时间可达5分钟,但对于长时间的侦察任务依然难以达到要求。以林间侦察为例,若侦察目标长时间在一片区域,则扑翼飞行机器人不需要持续飞行,仅需在某一固定地点保持静止即可。此外,保持静止也是侦察的必要行为,否则很容易引起侦察目标的注意。一些学者采用压电或太阳能技术为机器人供能,但往往结构复杂,可靠性低,且没有解决机器人需要保持静止的需求,即栖息的需求。亟需一种可栖息的方案,以延长机器人的续航时间以及侦察可靠性。
技术实现思路
1、针对现有技术的不足,本公开的目的在于提供一种可栖息的微型仿生扑翼飞行器,解决了现有技术中可悬停双扑翼机器栖息困难的问题。
2、本公开的目的可以通过以下技术方案实现:
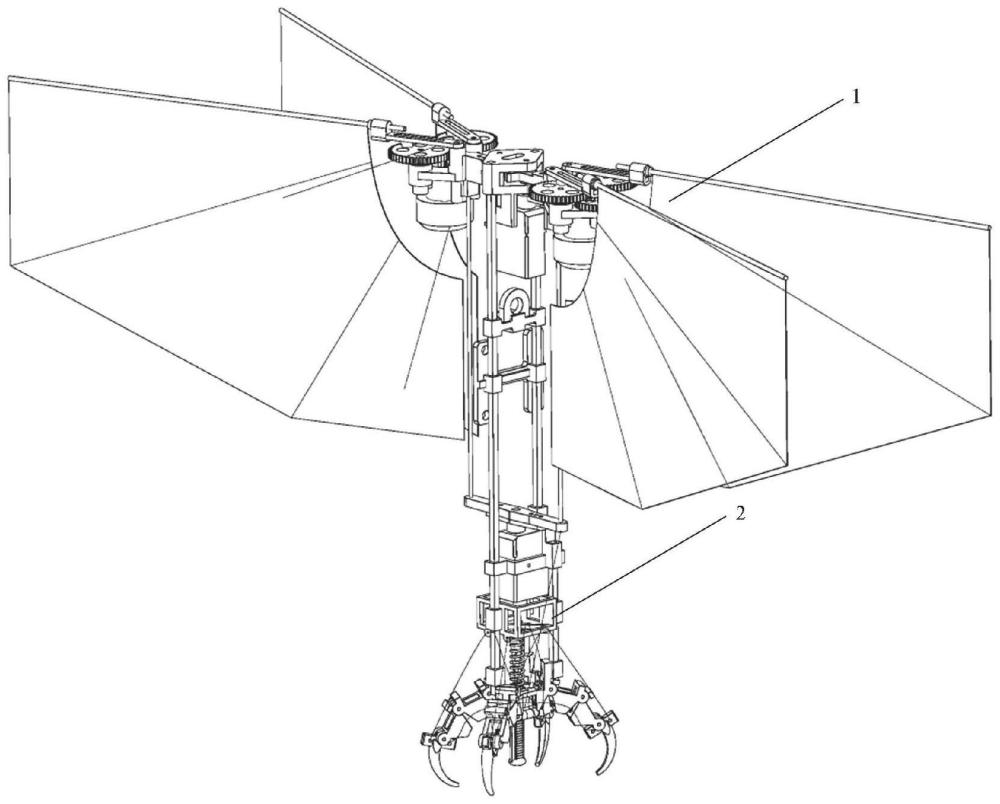
3、一种可栖息的微型仿生扑翼飞行器包括栖息机构;
4、栖息机构由四个爪趾、中心架、棘条、棘爪、绳索、弹簧片、弹簧以及电池架构成,其中每个爪趾由近臂、远臂和爪尖构成。
5、中心架呈两层中空状,中部有贯穿开口,上层有交叉状开口,以及一个矩形开口。棘条竖直安装于中心架的中部贯穿开口中,与中心架间隙配合。棘条的中上部、顶部分别有1个圆孔。弹簧片竖直安装于中心架上层的矩形开口中,棘爪通过销钉安装于中心架下层的通孔中,被弹簧片抵住,顶部与棘条相接触。
6、中心架四周通过销钉连接有4根爪趾,每根爪趾上都通过销钉连接了近臂、远臂、爪尖。近臂、远臂皆为中空状,两侧带孔洞。爪尖的上下带有吊耳,供连接绳索。
7、电池架位于整个栖息机构的顶端,电池架底部四周有4个孔洞,底部中心有一个孔洞。底部中的孔洞用于与棘条顶部的孔洞连接弹簧,而底部四周的孔洞用于与爪尖上侧的吊耳连接绳索。1根绳索依次穿过爪尖上侧吊耳、1个电池架底部的孔洞、棘条顶部的孔洞、1个电池架底部的孔洞,1个爪尖上侧吊耳。另一绳索与之交叉,以同样的方式穿过若干孔洞。同样地,1根绳索依次穿过爪尖下侧吊耳、远臂两侧孔洞、近臂两侧孔洞、棘条中上部孔洞、近臂两侧孔洞,远臂两侧孔洞、爪尖下侧吊耳。另一绳索与之交叉,以相同的方式穿过若干孔洞。
8、初始状态时,棘条处于中心架底部,弹簧处于放松状态,此时4根爪趾未合拢。当棘条底部收到向上的冲击,棘条向上运动,同时带动穿过其中上部孔洞的2根绳索向上拉伸,爪尖因此受到向内的拉力,随即合拢,弹簧被压缩。中心架上层的交叉状开口提供了这2根绳索的位移空间。由于棘条机构的特性,棘条向上运动后,整个栖息机构会自锁,确保抓握力足够。棘爪上的孔洞与偏航控制机构的末端用绳索相连接,确保偏航控制机构未扭转时,该绳索几乎是绷直状态。当希望栖息机构解锁时,扑翼飞行机器人扑动翅膀,待升力足够后,使偏航控制机构扭动,进而拉动绳索,使棘爪向外转动,脱离棘条上的齿,此时弹簧释放能量,拉动上侧的2根绳索,爪尖收到向外的拉力,爪趾张开,栖息机构回到初始状态。
9、有益效果
10、(1)本发明给扑翼飞行机器人提供了栖息的能力,仅使用碳纤维杆将栖息机构与扑翼飞行机器人本体连接,结构独立;
11、(2)本发明的栖息机构无需额外的驱动器,依靠机器人的重力势能获得抓握力,且利用棘条机构的自锁特性保证抓握力足够,结构轻巧、可靠;
12、(3)本发明利用绳驱实现了爪趾的合拢、分开,以及棘条机构的解锁,结构精密、轻便;
13、(4)本发明利用偏航控制机构的扭转拉动棘爪,充分利用了扑翼飞行机器人本体的特性,避免了机构的冗余;
14、(5)本发明采用了无尾式的扑翼飞行机器人本体,方便添加栖息机构,减少了栖息机构对气动力的影响。
技术特征:1.一种可栖息的微型仿生扑翼飞行器,其特征在于,所述飞行器包括栖息机构,所述栖息机构包括;
2.根据权利要求1所述的一种可栖息的微型仿生扑翼飞行器,其特征在于,所述控制滑块为棘条,竖直安装于中心架的贯通孔中,中心架上活动安装有与棘条相互排配合的棘爪,所述棘爪通过绳索的牵引进行控制。
3.根据权利要求1所述的一种可栖息的微型仿生扑翼飞行器,其特征在于,所述控制滑块的运动方向上设有储能弹性件。
4.根据权利要求1所述的一种可栖息的微型仿生扑翼飞行器,其特征在于,所述飞行器上设有偏航控制机构,所述绳索两端分别设置在棘爪和偏航控制机构的末端。
5.根据权利要求1所述的一种可栖息的微型仿生扑翼飞行器,其特征在于,所述控制滑块上设有至少一个顶部孔和至少一个中上部孔,分别穿过爪尖绳索和爪趾绳索;
6.根据权利要求3所述的一种可栖息的微型仿生扑翼飞行器,其特征在于,所述储能弹性件为弹簧。
7.根据权利要求3所述的一种可栖息的微型仿生扑翼飞行器,其特征在于,所述近臂、远臂和爪尖通过转轴活动连接。
8.根据权利要求1所述的一种可栖息的微型仿生扑翼飞行器,其特征在于,所述爪趾数量为四个,分别设置在中心架下端四角位置。
9.根据权利要求3所述的一种可栖息的微型仿生扑翼飞行器,其特征在于,所述飞行器使用无尾翼方案,减少了栖息机构对气动力的影响。
10.根据权利要求2所述的一种可栖息的微型仿生扑翼飞行器,其特征在于,所述中心架呈两层中空状,中部有贯穿开口,上层有交叉状开口,以及一个矩形开口,控制滑块竖直安装于中心架的中部贯穿开口中,与中心架间隙配合,弹簧片竖直安装于中心架上层的矩形开口中,棘爪通过销钉安装于中心架下层的通孔中,被弹簧片抵住,顶部与棘条相接触。
技术总结本发明公开一种可栖息的微型仿生扑翼飞行器,属于飞行器领域。本发明包括一个扑翼飞行机器人本体与一个栖息机构,通过碳纤维杆将两者连接。该栖息机构包括爪趾、中心架、棘条、棘爪、绳索、弹簧片、弹簧以及电池架,不需要额外的驱动器,仅利用栖息时的冲击和偏航控制机构的扭转实现栖息机构的自锁与解锁。机器人能够在树枝等粗糙柱状物上方悬停,再利用下落时的冲击拉动绳索,牵引爪趾合拢,并通过棘条棘爪实现自锁,确保栖息的抓握力足够。偏航控制机构拉动棘爪,栖息机构解锁,确保机器人能够脱离栖息物。本发明实现了微型仿生扑翼飞行机器人的栖息与起飞。技术研发人员:邓慧超,王一雄受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/222596.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表