一种快捷拆装的模块化涵道旋翼飞行器的制作方法
- 国知局
- 2024-08-01 06:03:51
本发明属于飞行器设计领域,具体来说是一种采用模块化设计、便于使用人员快捷携带拆装、并具备多飞行器间空中自由组合和分解能力的涵道多旋翼无人飞行器。
背景技术:
1、模块化飞行器是指通过一个或几个信息作战指挥系统为母体,通过大量的小型战斗载体组正一个大型的战斗单元,从而进行精确、高效、全方位立体防御和攻击的作战形式,以单平台的能力为支撑,构建具有高灵活性、低成本、功能分布化和智能特征的作战体系。个体飞行器之间通过硬件连接而实时改变组合体飞行器的任务能力,以适应复杂的动态环境,并且组合体飞行器具有较强的鲁棒性,不会因为某个或部分部件的故障而影响组合体飞行器的飞行能力,可实现采用一款飞行器实现不同任务载荷的输运任务。
2、模块化飞行器的常见使用模式为利用单兵携带或车辆集中输运,根据任务载荷需求进行地面组装形成组合体飞行器,挂载特定载荷后升空执行任务,包括单兵物资运送、大/中/小型武器载荷投放、战场侦察、灾害救援、中继通信等使用场景。
3、目前采用的模块化飞行器,个体间的机械接口相对固定,单次任务场景单一,完成任务后需返回地面重新组装,单个飞行器的功能扩展性较差,损坏后需要整体更换,使用成本高昂。为便于携带,单个飞行器的尺寸较小,组合体载荷能力上限低,限制了其使用的灵活性。
技术实现思路
1、为了解决上文中提到的模块化飞行器灵活性低、功能扩展性差、使用成本高等技术缺陷,本发明提出一种快捷拆装的模块化涵道旋翼飞行器,个体飞行器采用模块化设计,可自由更换功能模块和接口模块,有效降低使用成本并提高便携性,并且具备空中自由组合/分解的能力,大大扩展任务的灵活性。
2、本发明的技术方案:
3、一种快捷拆装的模块化涵道旋翼飞行器,所述的模块化涵道旋翼飞行器由多个单体飞行器构成,每个单体飞行器结构相同,能够自主飞行并执行任务。单体飞行器间能够在空中自由组合为模块化涵道旋翼飞行器,执行大型载荷输运任务,并能够与智能化集群作战技术相结合,构建智能化的空中输运/作战网络。
4、所述的单体飞行器为模块化的x8构型涵道多旋翼飞行器,每个单体飞行器包括:1个主体模块1、4个涵道模块2、4个对接模块3。
5、所述的主体模块1为整个飞行器的核心,主体模块1为立方体构型,包括主体模块壳体8、动力电池9、电调10、连接孔位11、飞控板12、磁吸式接口13;所述的动力电池9、电调10、飞控板12均设置于主体模块壳体8内,所述的主体模块壳体8的四个侧面上均设置连接孔位11和磁吸式接口13,所述的连接孔位11用于为飞行器提供电力输入和信号输入以及与涵道模块2上的限位滑块17对接,所述的磁吸式接口13用于与涵道模块2相连接。
6、进一步的,所述的主体模块1还根据任务需要在主体模块壳体8内设置分电板、gps等。
7、所述的涵道模块2为整个飞行器的动力模块,涵道模块2为立方体构型,包括动力组件4、连接孔位11、磁吸式接口13、涵道模块壳体14、涵道15、卡榫式对接结构16、限位滑块17;所述的涵道模块壳体14中央为涵道15,涵道15中设置动力组件4,动力组件4包括动力电机和螺旋桨;所述的螺旋桨采用上下双桨设计,凭借涵道带来的拉力提升,能够在不损失拉力的情况下缩减飞行器的尺寸,或在同等尺寸下提供更大的载荷输运能力;涵道模块2与主体模块1对接的面上布置有限位滑块17和磁吸式接口13,限位滑块17与主体模块1上的连接孔位11对接,磁吸式接口13与主体模块1上的磁吸式接口13磁吸。涵道模块2与对接模块3对接的面上布置有连接孔位11、磁吸式接口13、卡榫式对接结构16,连接孔位11与对接模块3上的限位滑块17对接,磁吸式接口13与对接模块3上的磁吸式接口13磁吸,卡榫式对接结构16与对接模块3上的卡榫式对接结构16相连。
8、所述的对接模块3为个体飞行器对接的连接结构,对接模块3为等腰梯形体构型,包括对接模块壳体18、磁吸式接口13、对接机构公头5/对接结构母头6、卡榫式对接结构16、限位滑块17;对接模块3与涵道模块2对接的面上设置磁吸式接口13、卡榫式对接结构16、限位滑块17;对接模块3的外侧面上设置对接机构公头5或对接结构母头6,用于与另一个单体飞行器的对接模块3的外侧面连接。对接模块3承担个体对接时的力载荷传递、飞行器间对接、旋转、释放功能。
9、进一步地,所述的限位滑块17能够因为压力缩入对接模块3内,也能在压力释放后因自身弹力弹出。涵道模块2与对接模块3对接时,限位滑块17缩入对接模块3内,卡榫式对接结构16对接成功后,限位滑块17因自身弹力弹出,正好卡在连接孔位11中即可实现限位。
10、进一步地,所述的对接机构公头5和对接结构母头6的作用方式为:对接模块3沿对接机构公头5/对接结构母头6的方向推入,当插入到一定深度后,对接机构公头5顶端压入另一个单元体飞行器的对接机构母头6内的信号开关,开关打开,对接机构母头6内的锁止电机工作,驱动锁止舌头对对接机构公头5进行锁止,机构自动锁止。
11、进一步地,对接机构公头5包括公组磁铁组5-1、导向锥5-2、轴承5-3、公组支板5-4、大齿轮5-5、固定轴5-6、小齿轮5-7和舵机5-8;对接机构母头6包括母组磁铁组6-9、母组支板6-10、副导向锥6-11、锁止钩6-12和橡筋6-13。
12、所述的对接机构公头5为整个磁吸式对接机构的驱动部分,其中公组磁铁组5-1包含8块磁铁,相邻两块磁铁的极性相反,公组磁铁组5-1的8块磁铁与母组磁铁组6-9的8块磁铁极性相对应;导向锥5-2的中部为锥体,锥体表面均匀固定布置公组磁铁组5-1的8块磁铁,导向锥5-2的外端侧面设置弧形槽5-14,导向锥5-2的内端与固定轴5-6的一端固定。公组支板5-4的中部开设一个大的孔位,大的孔位中固定设置轴承支架,大的孔位两侧各开设一个小的孔位;两个轴承5-3分别固定设置在轴承支架内部两端,固定轴5-6设置于轴承5-3中,固定轴5-6中部穿过大齿轮5-5的轴心,并与大齿轮5-5固定,大齿轮5-5与小齿轮5-7啮合,大齿轮5-5在轴承支架的限制下,只能旋转45度;小齿轮5-7的中心轴与舵机5-8的输出轴固定;大齿轮5-5与小齿轮5-7配合,用于在磁吸式对接机构分离时将舵机5-8的机械力放大传递至固定轴5-6,驱动固定轴5-6旋转45度,使对接机构公头5磁铁组与对接机构母头6磁铁组极性相反,同时使导向锥5-2顶开锁止钩6-12,实现对接机构的分离。
13、所述的对接机构母头6为整个对接机构的锁止部分,母组支板6-10的中心设置内凹的锥体支撑架,母组磁铁组6-9的8块磁铁均匀固定于锥体支撑架上,母组支板6-10上锥体支撑架的两侧设置外凸的副导向锥6-11,用于与公组支板5-4的小的孔位配合对接,锁止钩6-12转动连接在锥体支撑架背面,橡筋6-13套在锁止钩6-12外围,始终对锁止钩6-12提供缩紧力。
14、单体飞行器拼装过程:首先将4个涵道模块2分别贴近主体模块1并将主体模块1的连接孔位11与涵道模块2的限位滑块17位置对齐,利用磁吸式接口13的磁性吸引到一起,完成初步固定;然后将所有对接模块3从上向下插入相邻两个涵道模块2之间,通过卡榫式对接结构16完成连接和锁定,完成单元体飞行器拼装。
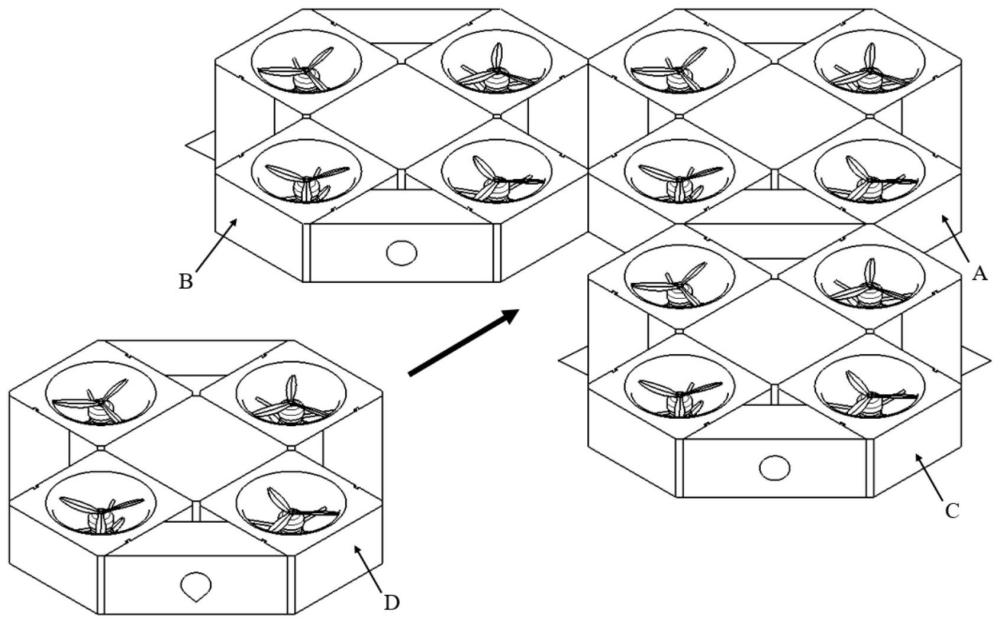
15、组合体飞行器地面拼接过程:将a单元体飞行器侧面的对接结构母头6与b单元体飞行器侧面的对接机构公头5相对,完成地面拼装。
16、组合体飞行器空中拼接过程:控制a单元体飞行器定位悬停,控制b飞行器飞行至同一高度后,沿侧向靠近a飞行器,调整姿态至两单元体飞行器对接机构对齐,将a单元体飞行器侧面的对接结构母头6与b单元体飞行器侧面的对接机构公头5相对,完成两单元体飞行器的空中拼接。
17、组合体飞行器地面解锁过程:通过地面站或遥控器发出解锁信号,对接机构锁止装置解锁,操作人员将两单元体飞行器沿对接机构方向拉开,完成地面解锁操作。
18、组合体飞行器空中解锁过程:通过地面站或遥控器发出解锁信号,对接机构锁止装置解锁,同时两个单元体飞行器飞控软件完成自动重构,随后其中一个单元体飞行器保持悬停状态,另一架单元体飞行器沿对接机构方向缓慢飞出,直至完全分离,完成空中解锁操作。
19、本发明的优点在于:
20、1、本发明快捷拆装模块化涵道旋翼飞行器,能够有效提高多旋翼飞行器的气动效率和防护性能,同时使得单元体飞行器具备模块化快速拆装、更换、升级能力,提高了多旋翼飞行器的便携性和功能拓展性,解决了多旋翼飞行器在外场使用时占用体积大、维修过程繁琐、功能相对单一等问题;
21、对于适用于不同载荷量级的不同大小的单元体飞行器,可通过通用的对接机构、模块化拼接的对接模块来实现灵活组合,有效兼顾任务载荷、续航能力、飞行速度的使用需求;且通过批量运输的方式,大大提高装备使用的保障性和应用场景的多样性。
22、2、本发明快捷拆装模块化涵道旋翼飞行器,在保持单个飞行器小尺寸低成本机动灵活优势的基础上,具备组装成大载重长航时组合体飞行器的能力,可以在地面或空中进行自由组合,能够在任务开始前、进行中和结束后各个阶段灵活拓展任务内容,适应不同载荷需求,从而大幅提升了飞行器的任务适应性。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222674.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表