一种具备高速、高机动双形态的仿生波动鳍水下推进装置
- 国知局
- 2024-08-01 06:25:25
本发明属于仿生水下机器人,具体涉及一种具备高速、高机动双形态的仿生波动鳍水下推进装置。
背景技术:
1、自然界中许多鱼类展现出高速和高机动的卓越功能,高速性能可以帮助鱼类捕捉猎物、穿越水域、快速逃避等,高机动性能可以帮助鱼类躲避攻击、快速反应、领域斗争等。这些高速-高机动推进策略可以分为两类,一种类型是在高速推进器官的基础上增加辅助机动器官,比如:鱼类的细长尾鳍配合高机动胸鳍、鳐鱼宽大胸鳍配合高机动刚性尾巴;另一种类型是同时具备两套推进系统,比如:黑魔鬼鱼具备高速尾鳍推进系统和高机动背鳍推进系统、乌贼具备高速喷水推进系统和高机动胸鳍推进系统、一些虾类具备高速爆发的弹性尾巴和高机动的蹼或腿。
2、自然界的设计灵感激发了人们对仿生机器人的研发,但是目前的仿生水下机器人或多或少都不能同时具备高速-高机动两种推进性能,基于bcf(body-caudal fin)的水下仿生机器人具备高游动速度,然而在机动性方面存在一定的不足;基于mpf(median-pairedfin)的水下仿生机器人则突出高机动性,却牺牲了游动速度。这两种方式各自具备优势,但也存在明显的局限性,这促使了一种具备高速和高机动的水下推进方式的需求。
3、目前,具备高速和高机动的水下仿生机器人被研制出来,但是由于两种推进机制的不同,导致机器人不得不分化推进机构,即采用两套推进机构分别用于高速情况和高机动情况。因此这种仿生机器人普遍存在机械结构庞大、复杂且推进系统控制难度高、机器人结构利用率低等问题。
技术实现思路
1、本发明的目的是解决现有的水下仿生机器人机械结构庞大复杂、推进系统控制难度高,结构利用率低的技术问题,而提供一种具备高速、高机动双形态的仿生波动鳍水下推进装置。
2、为了实现上述目的,本发明采用如下技术方案:
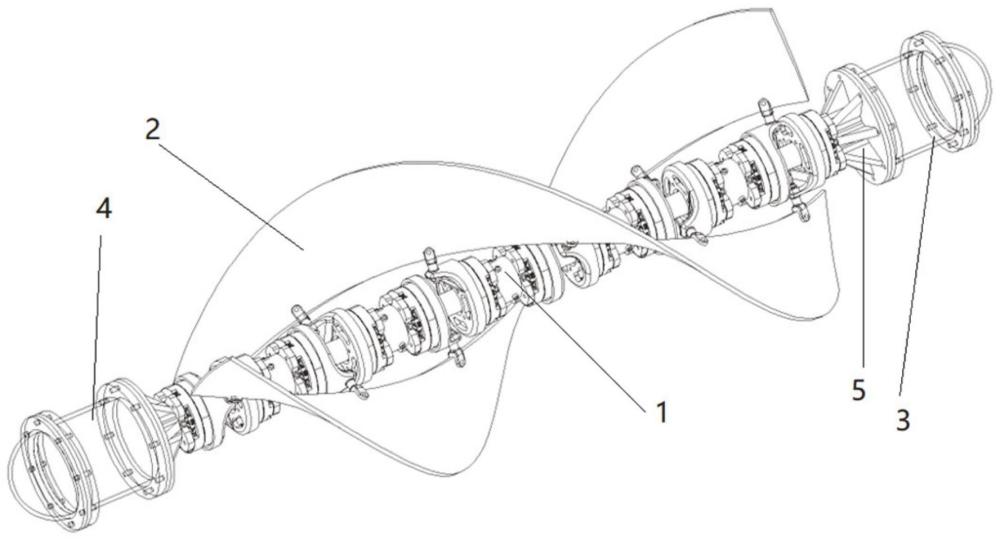
3、本发明提供一种具备高速、高机动双形态的仿生波动鳍水下推进装置,包括包括波动鳍中空驱动机构、波动鳍面、电子仓和电池仓;所述波动鳍面设置在波动鳍中空驱动机构两侧,电子仓和电池仓设置在波动鳍中空驱动机构两端,通过仓体连接件与波动鳍中空驱动机构连接;所述波动鳍中空驱动机构由若干个驱动单元组成,相邻两个驱动单元通过贯穿螺栓连接,所述波动鳍中空驱动机构与波动鳍面的连接处设置有一个转动自由度,带动波动鳍面实现波动运动。
4、进一步的,所述驱动单元包括中空防水电机、电机转子连接件、摆动鳍条和中空阶梯轴;所述中空防水电机安装在中空阶梯轴的两端,且背对设置,电机转子连接件设置在中空防水电机的一侧,通过贯穿螺栓与中空防水电机连接,所述电机转子连接件上设置有凸起的安装板,与电机转子连接件固连;所述安装板上设置有圆形通孔,摆动鳍条穿过圆形通孔与安装板连接。
5、进一步的,所述摆动鳍条包括摆臂、第一垫片、滚子轴套、铜套、第二垫片和转动轴钉;所述铜套设置在圆形通孔内,滚子轴套设置在铜套内,第二垫片和第一垫片分别设置在滚子轴套两端,摆臂设置在第一垫片下端,所述圆形通孔、铜套和滚子轴套的轴线相重合,所述转动轴钉自上而下依次穿过第二垫片、滚子轴套、第一垫片与摆臂螺纹连接;所述摆臂通过贯穿螺栓与波动鳍面连接。
6、进一步的,所述中空阶梯轴包括第一套筒和设置在第一套筒一侧的第二套筒;所述第二套筒直径大于第一套筒直径;所述第一套筒远离第二套筒的一端设置有贯通凹槽;所述第二套筒远离第一套筒的一端设置有贯通凹槽。
7、进一步的,所述驱动单元还包括电机定子内套筒和电机定子外套筒;所述电机定子内套筒套设在第二套筒上,贯穿螺栓穿过贯通凹槽与相邻的中空防水电机连接;所述电机定子外套筒套设在第一套筒上,贯穿螺栓穿过贯通凹槽与相邻的中空防水电机连接。
8、进一步的,所述第一套筒与中空防水电机内的转子设有一定间距;所述第二套筒与中空防水电机内的转子设有一定间距。
9、进一步的,所述仓体连接件包括第一仓体连接件和第二仓体连接件;所述第一仓体连接件设置在第一个驱动单元前端,电子仓设置在第一仓体连接件另一端;所述第二仓体连接件设置在最后一个驱动单元后端,电池仓设置在第二仓体连接件的另一端。
10、进一步的,所述电子仓、电池仓和中空防水电机的线圈设置在中空阶梯轴内。
11、进一步的,所述波动鳍面采用橡胶材料,在自然状态下呈扇形结构。
12、进一步的,所述铜套与圆形通孔为过盈配合。
13、与现有技术相比,本发明具有以下有益的技术效果:
14、本发明一种具备高速、高机动双形态的放生波动鳍水下推进装置,在水下具备高速螺旋和高机动波动两种运动形态,并能灵活切换,波动鳍面受到预紧力的作用下,内侧扇形弧线和外侧扇形弧线变为三维正弦曲面或者三维螺旋曲面,用于高速螺旋;内侧扇形弧线和外侧扇形弧线变为类正弦曲线或者类螺旋曲线,用于高机动波动;同时,在本专利基础上,波动鳍面可采用“双桨对转式”增加运动稳定性,在高速螺旋形态下有更高的推力;在高机动波动形态下允许波动鳍面在三百六十度任意位置波动,增加了该装置的运动模态和水下机动性;还可以将高速旋转形态与高机动波动形态相结合,实现快速高机动制动、转向、上浮下潜等多种姿态。
技术特征:1.一种具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
2.根据权利要求1所述的具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
3.根据权利要求2所述的具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
4.根据权利要求3所述的具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
5.根据权利要求4所述的具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
6.根据权利要求5所述的具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
7.根据权利要求6所述的具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
8.根据权利要求7所述的具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
9.根据权利要求8所述的具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
10.根据权利要求9所述的具备高速、高机动双形态的仿生波动鳍水下推进装置,其特征在于:
技术总结本发明属于仿生水下机器人技术领域,公开了一种具备高速、高机动双形态的仿生波动鳍水下推进装置,包括波动鳍中空驱动机构、波动鳍面、电子仓和电池仓,波动鳍中空驱动机构由若干个驱动单元组成,相邻两个驱动单元通过贯穿螺栓连接,驱动单元包括中空防水电机、电机转子连接件、摆动鳍条和中空阶梯轴,摆动鳍条包括摆臂、第一垫片、滚子轴套、铜套、第二垫片和转动轴钉,仓体连接件包括第一仓体连接件和第二仓体连接件,该装置可以实现两种水下运动形态,且可以自由切换。在高速形态下,中空防水电机带动摆动鳍条形成螺旋状旋转,快速移动;在高机动形态下,中空防水电机带动摆动鳍条进行类正弦波动,实现多模态高机动运动。技术研发人员:胡桥,孙良杰,张豪,姜川,苏文斌,陈龙,曾杨彬,石鑫东受保护的技术使用者:西安交通大学技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223771.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
一种船用导流罩的制作方法
下一篇
返回列表