一种锚缆机自动刹车控制方法及装置与流程
- 国知局
- 2024-08-01 06:26:08
本发明涉及锚缆机刹车控制,更具体地,涉及一种锚缆机自动刹车控制方法及装置。
背景技术:
1、锚缆机是一种船上用于收放锚及锚链的机械,使用人力、蒸汽机、电动机、液压马达等作为动力。按照驱动形式可以分为:手动、电动、液压。通常安装在船的首楼甲板上,主要作用是将船只固定在海上某一位置,防止漂移或失控。在海上,风浪大、水流急,船只有可能随时发生漂移或失控,而锚缆机可以通过系好锚链,将船只固定在位置,从而保证船只的安全。此外,锚缆机还可以用于船只靠泊时的缆绳操作、拖曳作业等。因此,锚缆机是船只上必不可少的重要设备之一,扮演着至关重要的角色。
2、传统的锚缆机其甲板机械控制系统故障频频,效率低下,隐患突出,驾驶员既要操纵船舶,又要通过广播、高频或人工通话等通信手段沟通,导致效率低,风险大,易出现操纵失误的情况。
3、专利号202110763826.3公开了一种船用大型锚绞机,涉及海洋工程装备技术领域。该船用大型锚绞机,包括底板,底板的底部固定安装有固定板,底板的顶部左端固定安装有左侧板,底板的顶部右端固定安装有右侧板,底板的上端设置有收线机构,底板的顶部设置有清理机构,收线机构包括电机、收线辊和保护罩,电机固定安装在底板的顶部左端靠近正面处,收线辊通过转动棒转动安装在左侧板的右侧上端,且转动棒的右端与右侧板左侧上端转动连接。该船用大型锚绞机,通过收线机构配合清理机构,在收线辊转动时,清理机构工作,将收线辊外侧卷起的牵引线上夹带的杂物清除,避免了杂物夹杂在卷起的牵引线上,使锚绞机的负载增大,对装置及牵引线都造成损坏,当该技术方案未能实现锚缆机的自动刹车。
技术实现思路
1、为解决上述问题,本发明提出一种锚缆机自动刹车控制方法及装置,能对锚缆机的收放速度、收放长度以及拉力进行实时监控并对控制锚缆机的自动刹车,防止锚缆机失效而发生事故,提高了船舶作业的效率和安全性。
2、为达到上述目的,本发明的一种锚缆机自动刹车控制方法,锚缆机电连接有监控系统,所述方法包括以下步骤:
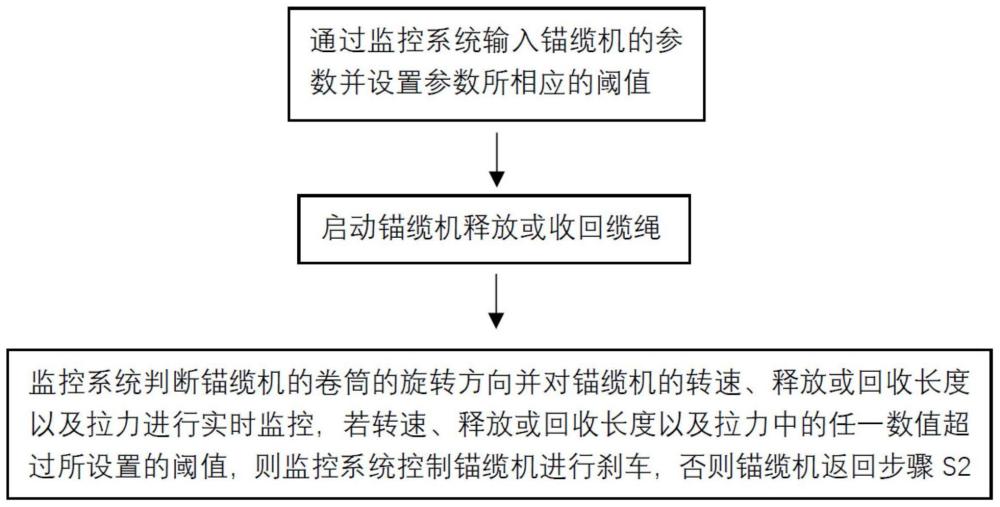
3、s1:通过监控系统输入锚缆机的参数并设置参数所相应的阈值;
4、s2:启动锚缆机释放或收回缆绳;
5、s3:监控系统判断锚缆机的卷筒的旋转方向并对锚缆机的转速、释放或回收长度以及拉力进行实时监控,若转速、释放或回收长度以及拉力中的任一数值超过所设置的阈值,则监控系统控制锚缆机进行刹车,否则锚缆机返回步骤s2。
6、在本技术方案中,监控系统与锚缆机的驱动器电连接,锚缆机不仅可以由人工主动控制,还可以由监控系统自动控制,通过监控系统输入锚缆机的型号参数,并通过监控系统设置危险阈值,当锚缆机超出设定的阈值时,监控系统可做出危险预警并自动控制锚缆机进行刹车,能避免锚缆机过载而失控或者缆绳受拉过大而断裂。
7、作为一种优选方案,为了计算缆绳的释放或回收长度,所以在所述步骤s1中,所述参数包括缆绳长度、缆绳直径以及锚缆机卷筒直径,为了将锚缆机的运行控制在安全的范围内,所以所述阈值包括缆绳释放长度极限值、缆绳回收长度极限值、最大转速、最大动态拉力以及最大静态拉力。
8、作为一种优选方案,为了避免锚缆机转速过快而失控,所以在所述步骤s3中,监控系统实时监控锚缆机转速,当锚缆机转速超过所述最大转速时,所述监控系统发出超速警报并向锚缆机发出刹车指令,否则锚缆机继续释放或回收缆绳。
9、作为一种优选方案,为了避免缆绳超出释放或回收的范围,所以所述步骤s3中,监控系统实时监控锚缆机卷筒的旋转圈数并通过所述缆绳直径和锚缆机卷筒直径计算出缆绳释放或回收长度,当所述缆绳释放或回收长度超过所述缆绳释放长度极限值或缆绳回收长度极限值时,监控系统发出放绳及收绳警报并向锚缆机发出刹车指令,否则锚缆机继续释放或回收缆绳。
10、作为一种优选方案,锚缆机由其驱动器驱动卷筒转动,实现缆绳的释放和回收,为了避免驱动器超负荷而造成驱动器的损坏,所述步骤s3中,监控系统实时监控锚缆机上驱动器的动态拉力,当所述动态拉力超过所述最大动态拉力时,所述监控系统发出超负荷警报并根据负载情况调节锚缆机转速。
11、作为一种优选方案,所述步骤s3中,监控系统实时监控锚缆机卷筒的静态拉力,当所述静态拉力超过所述最大静态拉力时,所述监控系统发出拉力过大警报并向锚缆机发出释放缆绳指令,避免缆绳受拉过大而断裂。
12、作为一种优选方案,所述步骤s3中锚缆机的刹车过程为:当监控系统向锚缆机发出刹车指令后,锚缆机在0s-5s后进行刹车,通过延时刹车可以有效避免瞬间外力而频繁触发静态拉力过大。
13、为达到上述目的,本发明的一种锚缆机自动刹车控制装置,包括张力测量销轴、转速测量模块以及监控系统,所述张力测量销轴安装于锚缆机的刹车机构上用于采集刹车机构上的剪切力,所述转速测量模块安装于锚缆机卷筒上用于采集锚缆机卷筒的转速,所述监控系统分别与张力测量销轴、转速测量模块以及锚缆机电连接。
14、在本技术方案中,张力测量销轴用于测量缆绳的静态拉力,通过参考缆绳的受拉极限可以设置最大静态拉力值,转速测量模块通过脉冲精确分析卷筒的转速,当锚缆机卷筒超速,监控系统会发出超速警报并切断卷筒运行,关闭刹车机构,保障锚缆机的安全。
15、作为一种优选方案,所述监控系统包括编码器和plc计数模块,所述编码器安装于锚缆机卷筒的轴端并与所述plc计数模块连接用于计算锚缆机卷筒的旋转圈数,编码器输出脉冲信号至plc计数模块,plc计数模块对脉冲信号进行处理判断卷筒旋转方向以及脉冲计数的加减方向。
16、作为一种优选方案,锚缆机的驱动器上设有压力传感器用于采集动态拉力,当驱动器超出最大动态拉力,监控系统对驱动器的速度进行调节避免驱动器过载。
17、与现有技术相比,本发明的有益效果是:
18、1.本发明通过监控系统实时监控锚缆机的运行状态,通过预设阈值实现对锚缆机的自动控制,及时做出危险预警和紧急相应,保障了锚缆机运行的安全性。
19、2.监控系统能监控锚缆机释放或回收的缆绳长度,精确的将缆绳长度控制在预设值,提高了船舶作业的效率。
技术特征:1.一种锚缆机自动刹车控制方法,其特征在于,锚缆机电连接有监控系统,所述方法包括以下步骤:
2.根据权利要求1所述的一种锚缆机自动刹车控制方法,其特征在于,在所述步骤s1中,所述参数包括缆绳长度、缆绳直径以及锚缆机卷筒(1)直径,所述阈值包括缆绳释放长度极限值、缆绳回收长度极限值、最大转速、最大动态拉力以及最大静态拉力。
3.根据权利要求2所述的一种锚缆机自动刹车控制方法,其特征在于,在所述步骤s3中,监控系统实时监控锚缆机转速,当锚缆机转速超过所述最大转速时,所述监控系统发出超速警报并向锚缆机发出刹车指令,否则锚缆机继续释放或回收缆绳。
4.根据权利要求2所述的一种锚缆机自动刹车控制方法,其特征在于,所述步骤s3中,监控系统实时监控锚缆机卷筒(1)的旋转圈数并通过所述缆绳直径和锚缆机卷筒(1)直径计算出缆绳释放或回收长度,当所述缆绳释放或回收长度超过所述缆绳释放长度极限值或缆绳回收长度极限值时,所述监控系统发出放绳及收绳警报并向锚缆机发出刹车指令,否则锚缆机继续释放或回收缆绳。
5.根据权利要求2所述的一种锚缆机自动刹车控制方法,其特征在于,所述步骤s3中,监控系统实时监控锚缆机上驱动器(2)的动态拉力,当所述动态拉力超过所述最大动态拉力时,监控系统发出超负荷警报并根据负载情况调节锚缆机转速。
6.根据权利要求2所述的一种锚缆机自动刹车控制方法,其特征在于,所述步骤s3中,监控系统实时监控锚缆机卷筒(1)的静态拉力,当所述静态拉力超过所述最大静态拉力时,所述监控系统发出拉力过大警报并向锚缆机发出释放缆绳指令。
7.根据权利要求1所述的一种锚缆机自动刹车控制方法,其特征在于,所述步骤s3中锚缆机的刹车过程为:当监控系统向锚缆机发出刹车指令后,锚缆机在0s-5s后进行刹车。
8.一种锚缆机自动刹车控制装置,用于实现权利要求1至7任一项所述的锚缆机自动刹车控制方法,其特征在于,包括张力测量销轴(4)、转速测量模块(5)以及监控系统,所述张力测量销轴(4)安装于锚缆机的刹车机构(3)上用于采集刹车机构(3)上的剪切力,所述转速测量模块(5)安装于锚缆机卷筒(1)上用于采集锚缆机卷筒(1)的转速,所述监控系统分别与张力测量销轴(4)、转速测量模块(5)以及锚缆机电连接。
9.根据权利要求8所述的一种锚缆机自动刹车控制装置,其特征在于,所述监控系统包括编码器和plc计数模块,所述编码器安装于锚缆机卷筒(1)的轴端并与所述plc计数模块连接用于计算锚缆机卷筒(1)的旋转圈数。
10.根据权利要求8所述的一种锚缆机自动刹车控制装置,其特征在于,锚缆机的驱动器(2)上设有压力传感器用于采集动态拉力。
技术总结本发明公开了一种锚缆机自动刹车控制方法及装置,锚缆机电连接有监控系统,该方法包括S1:通过监控系统输入锚缆机的参数并设置参数所相应的阈值;S2:启动锚缆机释放或收回缆绳;S3:监控系统判断锚缆机的卷筒的旋转方向并对锚缆机的转速、释放或回收长度以及拉力进行实时监控,若转速、释放或回收长度以及拉力中的任一数值超过所设置的阈值,则监控系统控制锚缆机进行刹车,否则锚缆机返回步骤S2。本发明对锚缆机的收放速度、收放长度以及拉力进行实时监控并对控制锚缆机的自动刹车,提高了船舶作业的效率和安全性。技术研发人员:简兴旺,陈瑞彬,洪斌,沈傲,郑龙飞,张友志,黄斌华,吕东辉,许冠彪受保护的技术使用者:湛江港(集团)股份有限公司技术研发日:技术公布日:2024/4/17本文地址:https://www.jishuxx.com/zhuanli/20240722/223835.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。