海上自动求救装置及其控制方法、电子设备和船舶与流程
- 国知局
- 2024-08-01 06:26:04
本发明涉及海上救生设备设计,具体而言,涉及一种海上自动求救装置及其控制方法、电子设备和船舶。
背景技术:
1、船舶航行过程中,在失去航向或船员出现紧急情况得不到救助时,通常会通过求救装置来进行求救,当船舶发生意外沉没时,求救装置会漂浮在海面上持续求救。
2、目前,相关技术的海上自动求救装置中,求救方式比较单一,影响求救效率。并且,自动求救装置在海面上处于漂流状态,当设备漂流与原位置产生较大偏移时,影响救生人员的搜救范围。
3、因此,为了拓展求救方式,缩小救生人员的搜救范围,提升求救效率,提出一种能够进行实时位置调整,以提升搜救效率的海上自动求救装置成为目前亟待解决的问题。
技术实现思路
1、本发明旨在解决或改善现有技术中由于自动求救装置在海面上处于漂流状态,当设备漂流与原位置产生较大偏移时候,影响救生人员的搜救范围的技术问题。
2、本发明的第一个目的在于提供一种海上自动求救装置。
3、本发明的第二个目的在于提供一种基于海上自动求救装置的控制方法。
4、本发明的第三个目的在于提供一种电子设备。
5、本发明的第四个目的在于提供一种船舶。
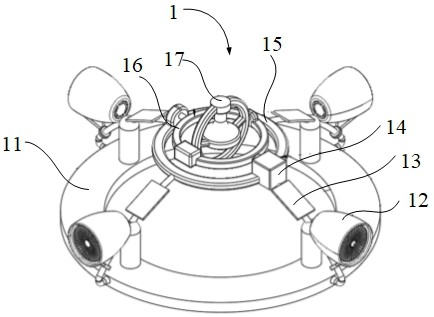
6、为实现上述目的,本发明第一方面的技术方案提供了一种海上自动求救装置,包括安全气囊组件;北斗定位组件,用于获取海上自动求救装置的起点广播求救信号位置和实际位置;太阳能充电组件,用于给海上自动求救装置中用电设备进行供电;水压传感器,用于检测海上自动求救装置的压力;涡轮组件,设置于太阳能充电组件上;控制装置,用于在水压传感器检测的压力达到预设压力阈值时,打开安全气囊组件;以及用于根据北斗定位组件获取的实际位置与起点广播求救信号位置进行比较,在实际位置和起点广播求救信号位置之间的距离超过预设距离范围时,控制涡轮组件开启,使海上自动求救装置移动至起点广播求救信号位置。
7、根据本发明提供的海上自动求救装置,通过设置安全气囊组件,在海上自动求救装置落水后可自动打开,使设备漂浮于海面,利于求救信号的发射,相比于传统无气囊的求救装置来说,具有可重复使用性和信号发射稳定性。利用太阳能充电技术为太阳能充电组件充电,以保证海上自动求救装置的电量,以免落水后因电量过低或者无电量而错失求救机会,可长时间发射求救信号,直至搜救成功。用电设备可以指代海上自动求救装置中任意需要用电的组件和设备,均可以采用太阳能充电组件为其进行供电。起点广播求救信号位置可以理解为海上自动求救装置的落水位置,落水位置也即需要救援的位置,通过北斗定位组件实时获取海上自动求救装置漂流的实际位置,在实际位置与落水位置之间的距离超过预设距离范围时,开启涡轮组件以使海上自动求救装置向落水位置进行移动,预设距离范围可以根据实际需求而设定,这样的话就可以保证海上自动求救装置始终处于预设距离范围内,缩小搜救范围,提高搜救效率。
8、另外,本发明提供的海上自动求救装置还可以具有如下附加技术特征:
9、在一些技术方案中,可选地,海上自动求救装置中还包括灯光组件,用于发射光求救信号;电机组件,与灯光组件连接,用于调整灯光组件的角度;控制装置还用于,在安全气囊组件打开后,开启灯光组件和电机组件。
10、在该技术方案中,海上自动求救装置还可以利用灯光组件发射强光sos求救信号,以便于救生人员进行搜救,拓展了求救方式,进一步提高救援效率。同时,还可以利用电机组件实时调整灯光组件的角度,以使灯光组件朝正上方发射sos求救信号,方便相关人员夜间搜救。
11、在一些技术方案中,可选地,海上自动求救装置还包括陀螺仪传感器,根据陀螺仪传感器的姿态模式,控制装置控制电机组件运行,调整灯光组件的角度,以确保灯光组件发出的灯光方向保持不变。
12、在该技术方案中,当设备落水后,根据海上自动求救装置落水的不同状态和陀螺仪传感器的姿态,运行电机,增减x轴、y轴角度,以保持灯光组件朝向天空,方便相关人员夜间搜救。
13、在一些技术方案中,可选地,海上自动求救装置中还包括温度传感器,用于检测海上自动求救装置所处的环境温度。
14、在该技术方案中,在未发生落水事件时,海上自动求救装置放置在船舶的船舱内,通过温度传感器实时检测船舱内的环境温度,在船舱内温度聚升,并持续一段时间,可进行报警,对火灾的发生进行示警,从而使得海上自动求救装置不仅仅能够为海上救援提供帮助,同时还能够对火灾事件进行检测,实现了一物多用。
15、在一些技术方案中,可选地,太阳能充电组件为四个,太阳能充电组件在安全气囊组件的周向上均匀分布;任意一个太阳能充电组件上均设置有至少一个涡轮组件。
16、在该技术方案中,安全气囊组件为圆环状,四个太阳能充电组件均匀分布在安全气囊组件上,两两太阳能充电组件之间对立设置,当海上自动求救装置在海上漂流时,在实际位置与落水位置之间的距离超过预设距离范围时,开启涡轮组件以使海上自动求救装置向落水位置进行移动。通过设置四个涡轮组件,开启任意一个涡轮组件或相邻的两个涡轮组件,可以实现对海上自动求救装置进行任意方向的移动,以保证海上自动求救装置始终处于预设距离范围内,缩小搜救范围,提高搜救效率。
17、本发明第二方面提供了一种基于海上自动求救装置的控制方法,用于第一方面任一项技术方案中的海上自动求救装置,海上自动求救装置还包括灯光组件、电机组件、陀螺仪传感器和温度传感器,控制方法包括实时监控船舶是否发生落水事件;在检测到发生落水事件后,控制与船舶进行通信的卫星发送求救信号,并控制水压传感器检测海上自动求救装置的压力值,判断压力值是否达到预设压力阈值;若是,控制安全气囊组件开启;控制北斗定位组件对海上自动求救装置的位置信息进行检测,发送实时位置信息至卫星,生成海上自动求救装置的运动轨迹,并记录起点广播求救信号位置;判断海上自动求救装置的实际位置和起点广播求救信号位置之间的距离是否超过预设距离范围;若是,控制涡轮组件开启,使海上自动求救装置移动至起点广播求救信号位置。
18、根据本发明提供的基于海上自动求救装置的控制方法,在检测到船舶发生落水事件后,海上自动求救装置也会落水,通过设置安全气囊组件,在海上自动求救装置落水后可自动打开,使设备漂浮于海面,利于求救信号的发射,相比于传统无气囊的求救装置来说,具有可重复使用性和信号发射稳定性。起点广播求救信号位置可以理解为海上自动求救装置的落水位置,落水位置也即需要救援的位置,通过北斗定位组件实时获取海上自动求救装置漂流的实际位置,在实际位置与落水位置之间的距离超过预设距离范围时,开启涡轮组件以使海上自动求救装置向落水位置进行移动,预设距离范围可以根据实际需求而设定,这样的话就可以保证海上自动求救装置始终处于预设距离范围内,缩小搜救范围,提高搜救效率。
19、在检测到海上自动求救装置的实际位置和起点广播求救信号位置之间的距离小于预设距离范围后,控制涡轮组件关闭。
20、在一些技术方案中,可选地,在控制安全气囊组件开启的步骤后,还包括:控制灯光组件开启;根据陀螺仪传感器的姿态模式,控制电机组件运行,调整灯光组件的角度,以确保灯光组件发出的灯光方向保持不变。
21、在该技术方案中,当设备落水后,根据海上自动求救装置落水的不同状态和陀螺仪传感器的姿态,运行电机,通过增减x轴、y轴角度,以保持灯光组件朝向天空,方便相关人员夜间搜救。
22、在一些技术方案中,可选地,基于海上自动求救装置的控制方法,还包括检测环境温度值,在环境温度值超过预设温度阈值时,发出报警信号。
23、在该技术方案中,在检测到未发生落水事件时,海上自动求救装置存放在船舶的船舱内,通过温度传感器实时检测船舱内的环境温度,在船舱内温度聚升,并持续一段时间,可进行报警,对火灾的发生进行示警,从而使得海上自动求救装置不仅仅能够为海上救援提供帮助,同时还能够对火灾事件进行检测,实现了一物多用。
24、本发明第三方面的技术方案提供了一种电子设备,包括:存储器,存储有程序和/或指令;处理器,执行程序和/或指令;其中,处理器在执行程序和/或指令时,实现如第二方面任一项技术方案中的基于海上自动求救装置的控制方法的步骤。
25、根据本发明提供的电子设备,由于其能够实现如第二方面任一项技术方案中的基于海上自动求救装置的控制方法的步骤。因此,该电子设备还具有上述第二方面任一项技术方案中基于海上自动求救装置的控制方法的全部有益效果,在此不再赘述。
26、本发明第四方面的技术方案提供了一种船舶,包括如第一方面任一项技术方案中的海上自动求救装置。
27、根据本发明提供的船舶,由于其包括如第一方面任一项技术方案中的海上自动求救装置。因此,该船舶还具有上述第一方面任一项技术方案中海上自动求救装置的全部有益效果,在此不再赘述。
28、根据本发明的附加方面和优点将在下面的描述部分中变得明显,或通过根据本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223829.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表