一种独立安保控制系统的制作方法
- 国知局
- 2024-08-01 06:28:03
本技术涉及自动控制,具体涉及一种独立安保控制系统。
背景技术:
1、自主水下机器人(auv)是自身携带能源和推进装置,不需要人工干预,自主航行控制,自主执行作业任务的无人水下机器人。其系统组成有七部分包括控制系统、导航定位系统、通讯系统、载体系统、能源与推进系统、应急安全系统、水面支持系统。
2、auv因为是在水下运行,一旦出现故障问题就会难以搜寻,应急系统要保证在最坏情况下auv可以被找到,现有安保控制系统的所有推进控制信号由auv控制系统产生,并由安保控制系统输出,安保控制系统不负责控制系统的运动控制计算,只是在出现危险情况时如下潜深度过深,控制系统崩溃或母船通过水声通讯设备主动要求时上浮时,可切断推进系统输出,从而启动抛载电机完成抛掉压载块,从而强制auv上浮。
3、然而,现有的安保控制信号也是由水下机器人的系统控制器发出的,由于因为水下机器人的系统复杂庞大一旦出现宕机,会导致通信总线阻碍,从而会导致安保控制实际也无法工作,进而导致水下机器人丢失。
4、因此,需要提供一种独立安保控制系统,予以解决上述问题。
技术实现思路
1、本实用新型提供一种独立安保控制系统,通过设置计时模块和计时模块,使得水下机器人在达到最大深度或者设定的抛载时间,自主实现抛载以使得水下机器人上浮,以解决现有的水下机器人的控制系统如果出现故障会影响安保控制系统本身工作,从而导致水下机器人丢失的问题。
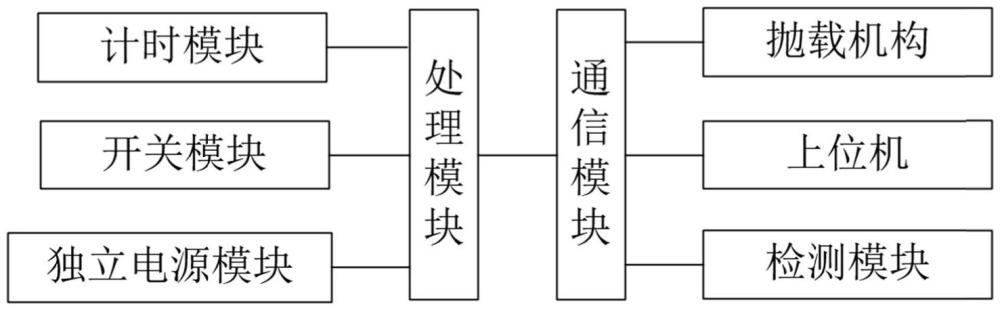
2、本实用新型的一种独立安保控制系统采用如下技术方案:包括:
3、检测模块,用于实时检测水下机器人的下潜深度;
4、计时模块,用于在水下机器人入水进行任务时开始计时;
5、以及处理模块,用于实时接收计时时间以及下潜深度,并在计时时间达到设定的抛载时间后或者下潜深度达到设定的最大深度后,控制抛载机构进行抛载动作。
6、优选的,还包括:独立电源模块,独立电源模块用于为处理模块、抛载机构、检测模块以及计时模块供电。
7、优选的,还包括:开关模块,其和处理模块电连接,开关模块用于控制水下机器人的推进器的电源供电电路的通断。
8、优选的,在计时时间达到设定的抛载时间后或者下潜深度达到设定的最大深度后,处理模块控制开关模块切断水下机器人的推进器的电源供电电路。
9、优选的,处理模块通过通信模块分别与检测模块、抛载机构进行通信。
10、优选的,通信模块包括:两路rs485串口,其中,一路rs485串口与检测模块通信,另一路rs485串口与抛载机构通信。
11、优选的,通信模块还包括:rs232串口,rs232串口用于和上位机通信,上位机用于输入抛载指令、设定抛载时间指令以及设定最大深度指令,其中,处理模块还用于根据抛载指令控制抛载机构进行抛载动作。
12、优选的,通信模块还包括:di输入接口,di输入接口用于输入系统故障信号,系统故障信号为水下机器人的系统的过流保护信号和过压保护信号,其中,处理模块还用于根据过流保护信号或者过压保护信号控制抛载机构进行抛载动作。
13、优选的,检测模块为深度传感器。
14、优选的,处理模块为微控制单元。
15、本实用新型的一种独立安保控制系统的有益效果是:
16、1、通过设置计时模块进行计时,通过检测模块实时检测下潜深度,使得不论水下机器人的系统出现什么故障,只要计时时间达到设定的抛载时间或者检测到的深度达到水下机器人所能工作的最大深度,此时处理模块就控制抛载机构主动抛掉压载块,以强制完成水下机器人的上浮,这样不管是水下机器人的控制系统软件错误、控制系统硬件故障,都可以可靠的完成上浮动作,从而防止水下机器人丢失。
17、2、通过设置独立的独立电源模块,使得独立安保控制系统和抛载机构的供电均由独立电源供电,当水下机器人的控制系统的主电源故障时,由独立电源模块为独立安保控制系统和抛载机构的供电,从而避免由于主电源故障导致的水下机器人丢失的问题。
18、3、通过将本发明的独立安保控制系统的处理模块与上位机通信,利用上位机输入抛载指令,以便于随时对水下机器人的上浮控制。
技术特征:1.一种独立安保控制系统,其特征在于,包括:
2.根据权利要求1所述的一种独立安保控制系统,其特征在于,还包括:独立电源模块,所述独立电源模块用于为处理模块、抛载机构、检测模块以及计时模块供电。
3.根据权利要求1所述的一种独立安保控制系统,其特征在于,还包括:开关模块,其和处理模块电连接,所述开关模块用于控制水下机器人的推进器的电源供电电路的通断。
4.根据权利要求3所述的一种独立安保控制系统,其特征在于,在计时时间达到设定的抛载时间后或者下潜深度达到设定的最大深度后,处理模块控制开关模块切断水下机器人的推进器的电源供电电路。
5.根据权利要求1所述的一种独立安保控制系统,其特征在于,所述处理模块通过通信模块分别与检测模块、抛载机构进行通信。
6.根据权利要求5所述的一种独立安保控制系统,其特征在于,所述通信模块包括:两路rs485串口,其中,一路rs485串口与所述检测模块通信,另一路rs485串口与所述抛载机构通信。
7.根据权利要求5所述的一种独立安保控制系统,其特征在于,通信模块还包括:rs232
8.根据权利要求5所述的一种独立安保控制系统,其特征在于,通信模块还包括:di
9.根据权利要求1所述的一种独立安保控制系统,其特征在于,所述检测模块为深度传感器。
10.根据权利要求1所述的一种独立安保控制系统,其特征在于,所述处理模块为微控制单元。
技术总结本技术涉及一种独立安保控制系统,包括检测模块、计时模块以及处理模块,检测模块用于实时检测水下机器人的下潜深度;计时模块用于在水下机器人入水进行任务时开始计时;处理模块用于实时接收计时时间以及下潜深度,并在计时时间达到设定的抛载时间后或者下潜深度达到设定的最大深度后,控制抛载机构进行抛载动作,本技术的安保控制系统不管是水下机器人的控制系统软件错误、控制系统硬件故障或者控制系统的主电源故障,都可以保证水下机器人的可靠上浮。技术研发人员:赵杰,蔡民,杜振明受保护的技术使用者:西安美泰航海科技有限公司技术研发日:20231013技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/223877.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表