一种水下清洗机器人
- 国知局
- 2024-08-01 06:27:58
本技术属于机械,涉及一种水下作业机器人,特别是一种水下清洗机器人。
背景技术:
1、随着海洋经济的发展,海洋养殖产业规模不断扩大。养殖网衣常常攀附海洋生物,滋生物影响养殖鱼类生长率,进而制约了产业发展。网衣清洗已经成为海洋养殖研究热点之一。
2、现有水下机器人通常采用气囊或浮板控制机器人框架浮力,但由于下潜深度不定。清理网衣网箱时,由于深海水压和浮力等因素影响,清洗机器人重心难以调整,在遇到不明撞击之后难以修正,从而阻碍运行。
3、目前公开的相关大型清洗机器人中,特别是船舶清洗机器人在进行大型壁面清洗时,采用了掉头的方式,即弧形转弯,而大型水下机器人掉头半径大、调转时间长、控制难度大,因而此种掉头方式大大降低了工作效率,由于掉头后的机器人姿态、位置偏差大,控制精度问题,容易造成漏洗或重复清洗。
技术实现思路
1、本实用新型的目的是针对现有的技术存在上述问题,提出了一种水下清洗机器人。
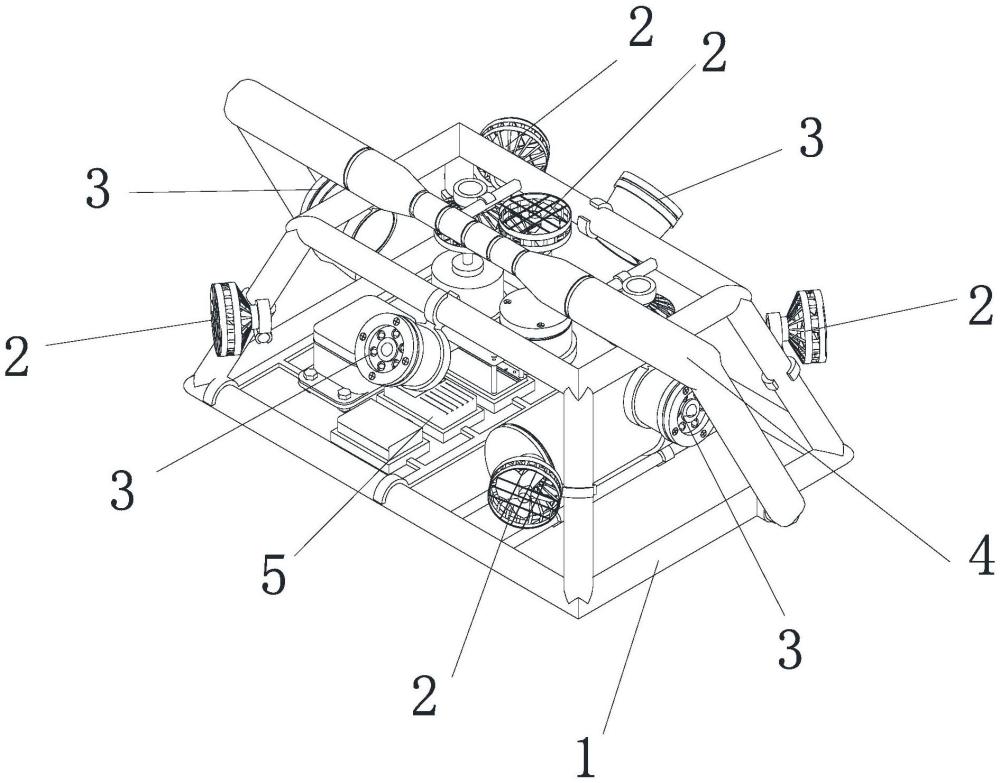
2、本实用新型的目的可通过下列技术方案来实现:一种水下清洗机器人,包括呈立体梯形的框架,所述框架的下底面装设清洗组件,所述框架的周侧和上底面装设若干推进器,所述框架的上底面周边装设照明摄像机;于所述框架下底面的相对两侧铰接浮力把手,所述浮力把手的内部呈密封填充浮力结构,所述浮力把手的一侧铰接点由浮力电机驱动连接。在上述的水下清洗机器人中,所述清洗组件包括若干高压喷头和若干清洗刷,若干所述高压喷头与若干所述清洗刷至少排列成一排,在每排中所述高压喷头与所述清洗刷呈一一交替布设,所述高压喷头通过管路连接高压泵的出水口,所述高压泵的进水口与外界连通。在上述的水下清洗机器人中,所述框架的立体梯形上底面内周固设交叉杆架,所述交叉杆架上装设一个朝外的所述推进器和两个朝内的所述推进器,一个朝内的所述推进器位于所述交叉杆架的中间位置,两个朝内的所述推进器分别位于一个朝外的所述推进器的两侧。在上述的水下清洗机器人中,所述框架的立体梯形四根侧边上均设置所述推进器,所述推进器朝外设置,所述推进器的推力方向与所述框架上底面的对角线延长方向相一致。在上述的水下清洗机器人中,所述推进器/所述照明摄像机与所述框架之间连接卡座,所述卡座包括连接杆,所述连接杆的一端固连套环,所述连接杆的另一端固连圆弧卡爪,所述套环固套于所述推进器/所述照明摄像机的外周,所述圆弧卡爪卡套于所述框架的管材外周。与现有技术相比,本水下清洗机器人具有以下有益效果:1、本清洗机器人可用于船舶、深海的网衣、网箱等大型结构表面附着物的水下清洗作业,采用了电机调节不同方位螺旋桨转速向六个方向推进的移动方式,具体为上升、下降、左移、右移、前进、后退。其中左移和右移代替传统的转弯掉头,向前推进代替吸附运作,可减小操控难度,增大机动性,节约掉头时间和空间,提高控制精度、清洗效率和单次清洗覆盖率。
3、2、本清洗机器人通过调转浮力模块,通过监控并利用浮力模块与机身的相对位置,从而实现浮心与重心的平衡调节,在机身发生碰撞倾斜的情况时,能够及时、自动恢复机身的平稳状态,提高清洗机器人在水下运行的稳定性和可靠性。
技术特征:1.一种水下清洗机器人,包括呈立体梯形的框架,其特征在于,所述框架的下底面装设清洗组件,所述框架的周侧和上底面装设若干推进器,所述框架的上底面周边装设照明摄像机;于所述框架下底面的相对两侧铰接浮力把手,所述浮力把手的内部呈密封填充浮力结构,所述浮力把手的一侧铰接点由浮力电机驱动连接。
2.如权利要求1所述的水下清洗机器人,其特征在于,所述清洗组件包括若干高压喷头和若干清洗刷,若干所述高压喷头与若干所述清洗刷至少排列成一排,在每排中所述高压喷头与所述清洗刷呈一一交替布设,所述高压喷头通过管路连接高压泵的出水口,所述高压泵的进水口与外界连通。
3.如权利要求2所述的水下清洗机器人,其特征在于,所述框架的立体梯形上底面内周固设交叉杆架,所述交叉杆架上装设一个朝外的所述推进器和两个朝内的所述推进器,一个朝内的所述推进器位于所述交叉杆架的中间位置,两个朝内的所述推进器分别位于一个朝外的所述推进器的两侧。
4.如权利要求3所述的水下清洗机器人,其特征在于,所述框架的立体梯形四根侧边上均设置所述推进器,所述推进器朝外设置,所述推进器的推力方向与所述框架上底面的对角线延长方向相一致。
5.如权利要求1所述的水下清洗机器人,其特征在于,所述推进器/所述照明摄像机与所述框架之间连接卡座,所述卡座包括连接杆,所述连接杆的一端固连套环,所述连接杆的另一端固连圆弧卡爪,所述套环固套于所述推进器/所述照明摄像机的外周,所述圆弧卡爪卡套于所述框架的管材外周。
技术总结本技术提供了一种水下清洗机器人,包括水上工作平台和呈立体梯形的框架,框架的下底面装设清洗组件,框架的周侧和上底面装设若干推进器,框架的上底面周边装设照明摄像机;于框架下底面的相对两侧铰接浮力把手,浮力把手的内部呈密封填充浮力结构,浮力把手的一侧铰接点由浮力电机驱动连接;框架的下底面上固设电子舱,电子舱内安装蓄电池、角度传感器、压力传感器、速度仪、水声定位器、姿态传感器、水下声学通信模块,角度传感器、压力传感器、速度仪、水声定位器、姿态传感器通过水下声学通信模块的电信号连接水上工作平台,水上工作平台通过水下声学通信模块电控连接清洗组件、推进器、照明摄像机和浮力电机。技术研发人员:冯春,任涛,乔妍栋,宋宁,张宇飞,刘娇娇,张华受保护的技术使用者:浙江海洋大学技术研发日:20231020技术公布日:2024/4/22本文地址:https://www.jishuxx.com/zhuanli/20240722/223865.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表