一种无人船水域测量机器人的制作方法
- 国知局
- 2024-08-01 06:32:57
本发明涉及水域测量,具体为一种无人船水域测量机器人。
背景技术:
1、近年来,随着国内经济建设迅猛发展,突发性灾情呈上升趋势,构建新型灾害应急响应机制迫在眉睫,许多突发性灾害与水相关,较为常见的有地震引发的堰塞湖,水利工程导致的库岸滑坡,以及人为导致的突发性环境污染事件等等;水环境监测、水利基础设施检测、水文信息获取等手段落后,水资源利用效率不高与国外一些水质监测工作较早的发达国家相比,我国地表水监测技术仍然较为落后,目前我国所进行的水质监测主要以理化监测为主,生物监测、遥感技术监测应用和水质自动监测都相对滞后,此外对于大坝堤防等水利设施的安全检测往往通过人工巡防及经验来判断其安全状态,这种方式不仅耗费大量的人力、物力,而且外业工作量大,主观性强,容易漏检误检,采集数据实时性不高,内业全凭人工处理,很难实现数据的综合分析与管理,从而难以达到对堤防安全的有效预警、病害的评估和防治,对于水下地形地貌、流速流量等水文信息的获取手段而言,虽然数据采集和检测技术水平不断提高,但测量往往以人工为主,难以实现自动化、智能化的数据采集,数据的传输也存在较大的问题,并且在近岸、滩涂、浅滩、岛礁及一些危险区域,测量存在盲区,随着科学技术的不断进步和发展,各种新的技术也不断地应用于环境监测、灾害应急、水利检测以及水文信息监测的实际工作中。
2、市面上常见的水域测量机器人在使用的过程中,通常无法对自身的宽度进行调节,在经过狭窄水域时,若自身宽度过宽,极易出现与外物碰撞的风险,此外市面上常见的水域测量机器人若重心发生偏移时,也较难有效对偏移状态进行调整。
3、于是,有鉴于此,针对上述情况以及现有的水域测量机器人及缺失予以研究改良,提出一种无人船水域测量机器人。
技术实现思路
1、本发明的目的在于提供一种无人船水域测量机器人,以解决上述背景技术中提出的问题。
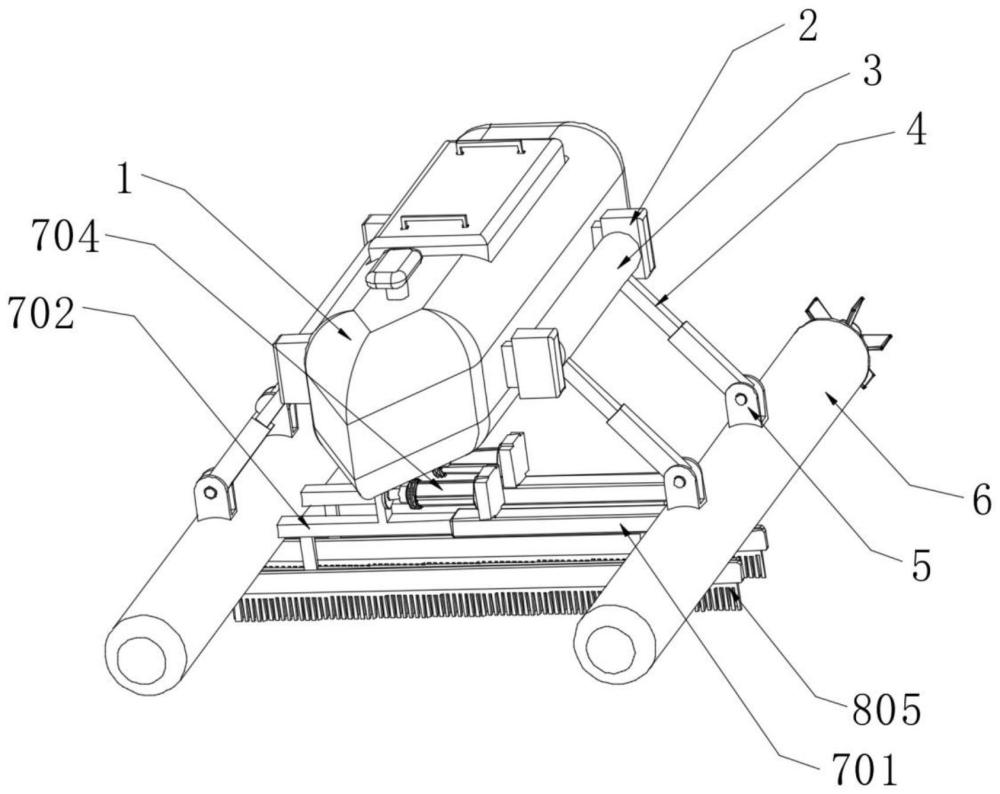
2、为实现上述目的,本发明提供如下技术方案:一种无人船水域测量机器人,包括船体、动力组件和防护组件,船体的外部两侧设置有固定座,固定座的内端转动连接有转动轴,转动轴的外表面固定有衔接杆,衔接杆的末端外侧设置有转动座,转动座的底端连接有动力组件,动力组件包括浮漂、浮力腔、充水腔、加压泵、加压管、均压管、流通管、单向入水阀、单向出水阀、蓄电池、电机和螺旋桨,浮漂的内部开设有浮力腔,浮漂的内表面两侧固定有充水腔,充水腔的外端设置有加压泵,加压泵的外端连接有加压管和均压管,两侧充水腔之间设置有两组流通管,其中一组流通管内部连接有单向入水阀,另一组流通管内部连接有单向出水阀,浮漂的内部末端安置有蓄电池,蓄电池外端电性连接有电机,电机的输出端连接有螺旋桨。
3、进一步的,所述加压泵通过加压管、均压管与充水腔相连通,且蓄电池对加压泵、单向入水阀、单向出水阀以及电机供电。
4、进一步的,所述浮漂的外端连接有对通组件,对通组件包括第一通管、第二通管、衔接块、电推杆和电控阀,第一通管的内部套接有第二通管,第一通管和第二通管的顶端安置有衔接块,衔接块之间安置有电推杆,第二通管的内部安置有电控阀。
5、进一步的,所述浮漂内部的充水腔通过第一通管、第二通管与另一组浮漂内部的充水腔连通,且同一组浮漂内的充水腔之间通过流通管相连通。
6、进一步的,所述电推杆伸缩使第二通管在第一通管外的长度进行调整,且蓄电池对电推杆、电控阀供电。
7、进一步的,所述第一通管与船体左端的浮漂固定,且第二通管与船体右端的浮漂固定。
8、进一步的,所述第一通管和第二通管底端连接有防护组件,防护组件包括对接座、对接杆、压力感应器、压力弹簧、拦截架和压块,对接座的顶端连接有对接杆,且对接座的内部中端固定有压力感应器,对接座的内部两侧设置有压力弹簧,压力弹簧的底端弹性连接有拦截架,拦截架的顶部外端设置有压块。
9、进一步的,所述对接座通过对接杆与第一通管以及第二通管固定,且对接座与拦截架套接连接。
10、进一步的,所述对接座在第一通管、第二通管底端均有安置,且两组对接座底端的拦截架相互贴合。
11、进一步的,所述拦截架与水底接触挤压压力弹簧,使压块与压力感应器贴合。
12、本发明提供了一种无人船水域测量机器人,具备以下有益效果:
13、1、本发明通过电推杆工作,能使第二通管在第一通管外端延伸的长度进行调整,因第一通管和第二通管分别与左右两端的浮漂固定,通过更改第二通管在第一通管外端延伸的长度,能对两浮漂之间的间距进行调整,浮漂的间距在调整的过程中,其产生的位移力能通过转动座传递至衔接杆上,这使得衔接杆和转动轴能进行旋转,而通过使衔接杆旋转调向,能对船体的高度进行调整,通过该设计,能使船体在进行水域测量的过程中灵活的调整仪器是否浸没水中或浸没水中的深度,此外通过在大风天气降低船体的高度以及增大两浮漂的间距,能降低设备因大风倾倒的概率,而在经过狭窄水域(水域有突出的石块以及其他障碍物)时,通过缩短两浮漂的间距,能使设备的整体宽度降低,从而使设备顺利穿过障碍物,这使得设备的使用灵活度得到提升。
14、2、本发明在使用过程中,若重力不稳发生前后倾斜时,朝向倾斜端充水腔处的加压泵工作,能向充水腔内进行加压,充水腔加压完成后,流通管外端的单向出水阀开启,这使得当前的充水腔能与该浮漂内另一个充水腔连通,因此时两充水腔存在气压差,这使得高气压充水腔内的水能流向至低气压的充水腔内,通过水体的流动,能调整设备的整体重心,从而使设备在发生倾斜时对重心进行调整,而重心调整完成后,两端充水腔外端的加压泵同时工作,控制均压管开启,这使得充水腔能与浮漂内部实现均压,从而方便后续重心调整,左右两端的充水腔可通过第一通管和第二通管连通,而当设备发生左右倾斜时,倾斜端的加压泵对充水腔加压,此时第二通管内的电控阀开启,此时高压侧充水腔内的水体能通过第一通管和第二通管流入至低压端的充水腔,从而实现左右端重力的平衡,通过以上操作,能使设备在使用过程中自由调整重心的位置以保证平衡,这能提升设备的使用稳定性,同时也使船体底端检测仪器搭载时的自由度提升。
15、3、本发明第一通管底端的拦截架最左端与左端浮漂的螺旋桨齐平,而第二通管底端的拦截架最右端与右端浮漂的螺旋桨齐平,这使得设备在使用的过程中,能通过拦截架有效阻挡水中的水草以及杂物避免与螺旋桨发生触碰,此外电推杆工作使第二通管在第一通管内部伸缩时,第二通管底端的拦截架能随着第二通管的移动同步位移,这使得拦截架的宽度也能进行调整,避免在穿过狭窄水域时与外物发生干涉,此外第二通管底端的拦截架在进行位移时,能与第一通管底端的拦截架进行交错,通过两组拦截架交错,能有效对拦截架之间拦截的水草等杂物进行切断,并使其与拦截架分离,这能避免拦截架表面拦截的水草过多影响设备正常移动,此外设备若设备所在的水域过浅,拦截架会先与水底接触,拦截架与水底接触后,其反作用力能通过拦截架传递至压力弹簧上,这使得拦截架能在对接座内部内缩,并使压块挤压压力感应器,通过该设计,工作人员在设备运行时,只需挂参会压力感应器是否感应到压力即可判断设备是否有搁浅的风险,这使得设备的使用稳定性进一步提升。
本文地址:https://www.jishuxx.com/zhuanli/20240722/224177.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表