一种舰载四轴稳定跟踪平台的制作方法
- 国知局
- 2024-08-01 06:32:53
本发明涉及一种稳定跟踪平台。
背景技术:
1、舰船在海上航行时会受到风、浪等环境和舰体自身特性的影响,使得舰体不可避免的产生横摇、纵摇、垂荡等无规则运动,由此带动舰体上的电子设备(诸如雷达)做无规则运动,对电子设备的性能产生不良影响。这时,电子设备就需要稳定平台来隔离舰体姿态变化,使电子设备保持在稳定的工作环境下。
2、专利“一种大型舰载雷达稳定跟踪装置”(cn201910698454.3)中提出了一种稳定跟踪装置,通过使用伸出杆-万向铰结构,来实现该装置的横摇和纵摇稳定功能。从结构原理来看,由于使用了万向铰,可以同时响应纵、横摇的角度输入,这就使得纵、横摇角度产生耦合问题,增加了控制的难度。专利“一种舰载稳定装置”(cn202020787241.6)中提出了一种类似stewart平台的稳定装置,该装置同样无法避免纵横摇角度耦合的问题。
技术实现思路
1、为了解决纵横摇角度耦合的问题,本发明提出了一种舰载四轴稳定跟踪平台。
2、本发明通过以下技术方案实现:
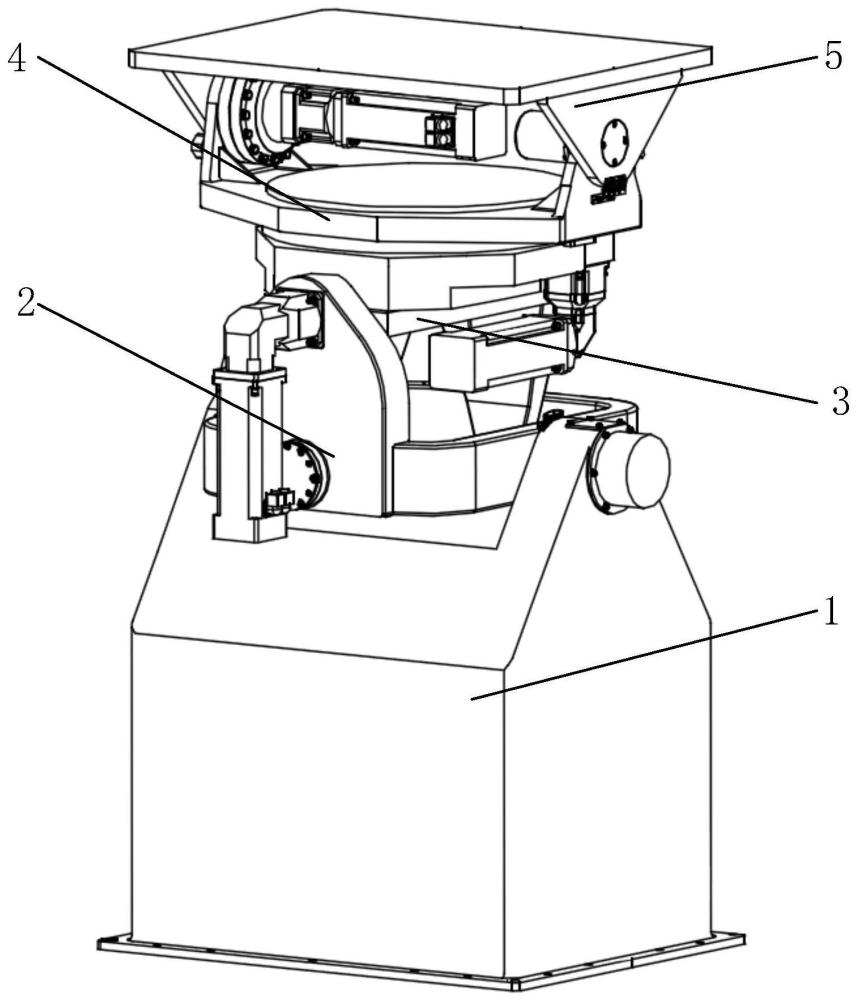
3、一种舰载四轴稳定跟踪平台,该平台包含基座1、横摇稳定机构2、纵摇稳定机构3、方位跟踪机构4和俯仰跟踪机构5;其中横摇稳定机构2的旋转轴线、纵摇稳定机构3的旋转轴线和方位跟踪机构4的旋转轴线上呈空间十字正交排布,避免了空间角度耦合;横摇稳定机构2包含横摇伺服电机21、横摇减速机22、横摇齿轮副23、横摇主动轴24以及横摇框架25、横摇角编码器26、横摇从动轴27,横摇伺服电机21、横摇减速机22和横摇齿轮副23串联安装,通过齿轮传动方式带动横摇主动轴24转动,横摇主动轴24与横摇从动轴27同轴安装,且均与横摇框架2)相互固定,实现三者等角度转动,横摇编码器26与横摇从动轴27之间通过联轴器连接,可实时检测横摇稳定机构2转动角度;纵摇稳定机构3包含纵摇伺服电机31、纵摇减速机32、纵摇齿轮副33、纵摇主动轴34、纵摇框架35、纵摇角编码器36、纵摇从动轴37,纵摇伺服电机31、纵摇减速机32和纵摇齿轮副33串联安装,通过齿轮传动方式带动纵摇主动轴34转动,纵摇主动轴34与纵摇从动轴37同轴安装,且均与纵摇框架35相互固定,实现三者等角度转动,纵摇编码器36与纵摇从动轴37之间通过联轴器连接,可实时检测纵摇稳定机构3转动角度;方位跟踪机构4安装在纵摇框架35上方,包含方位伺服电机41、方位减速机42、方位齿轮副43,旋转框架44,方位编码器45、拨叉46,方位伺服电机41、方位减速机42和方位齿轮副43串联安装,通过齿轮传动方式带动旋转框架44转动,拨叉46固定在旋转框架44,与旋转框架44同轴转动,并通过联轴器带动方位编码器45内轴转动,完成方位跟踪机构4角度检测;俯仰跟踪机构5安装在旋转框架44上方,包含俯仰伺服电机51、俯仰减速机组52、俯仰框架53、俯仰角编码器54、俯仰从动轴55,仰伺服电机51、俯仰减速机组52同轴串联安装,俯仰减速机组52的转动轴与俯仰框架53固定,带动俯仰框架53转动,俯仰从动轴55与俯仰框架53固定,并与俯仰减速机组52转动轴同轴安装,俯仰角编码器54通过联轴器与俯仰从动轴55连接,实现对俯仰跟踪机构5转动角度的检测。
4、本发明的有益效果包括:
5、1)横摇稳定机构的旋转轴线、纵摇稳定机构的旋转轴线和方位跟踪机构的旋转轴线上呈空间十字正交排布,避免了空间角度耦合,更容易实现三轴同时转动时的伺服闭环控制。
6、2)俯仰跟踪机构中,俯仰减速机组的转动轴同时也是俯仰跟踪机构的主动轴,省去了外部齿轮副传动机构,使得俯仰跟踪机构的结构更为紧凑,同时有助于降低平台总高度。
技术特征:1.一种舰载四轴稳定跟踪平台,其特征在于:包含基座(1)、横摇稳定机构(2)、纵摇稳定机构(3)、方位跟踪机构(4)和俯仰跟踪机构(5);其中横摇稳定机构(2)的旋转轴线、纵摇稳定机构(3)的旋转轴线和方位跟踪机构(4)的旋转轴线上呈空间十字正交排布;横摇稳定机构(2)包含横摇伺服电机(21)、横摇减速机(22)、横摇齿轮副(23)、横摇主动轴(24)以及横摇框架(25)、横摇角编码器(26)、横摇从动轴(27),横摇伺服电机(21)、横摇减速机(22)和横摇齿轮副(23)串联安装,通过齿轮传动方式带动横摇主动轴(24)转动,横摇主动轴(24)与横摇从动轴(27)同轴安装,且均与横摇框架(25)相互固定,进行三者等角度转动,横摇编码器(26)与横摇从动轴(27)之间通过联轴器连接,实时检测横摇稳定机构(2)转动角度;纵摇稳定机构(3)包含纵摇伺服电机(31)、纵摇减速机(32)、纵摇齿轮副(33)、纵摇主动轴(34)、纵摇框架(35)、纵摇角编码器(36)、纵摇从动轴(37),纵摇伺服电机(31)、纵摇减速机(32)和纵摇齿轮副(33)串联安装,通过齿轮传动方式带动纵摇主动轴(34)转动,纵摇主动轴(34)与纵摇从动轴(37)同轴安装,且均与纵摇框架(35)相互固定,三者等角度转动,纵摇编码器(36)与纵摇从动轴(37)之间通过联轴器连接,实时检测纵摇稳定机构(3)转动角度;方位跟踪机构(4)安装在纵摇框架(35)上方,包含方位伺服电机(41)、方位减速机(42)、方位齿轮副(43),旋转框架(44),方位编码器(45)、拨叉(46),方位伺服电机(41)、方位减速机(42)和方位齿轮副(43)串联安装,通过齿轮传动方式带动旋转框架(44)转动,拨叉(46)固定在旋转框架(44),与旋转框架(44)同轴转动,并通过联轴器带动方位编码器(45)内轴转动,进行方位跟踪机构(4)角度检测;俯仰跟踪机构(5)安装在旋转框架(44)上方,包含俯仰伺服电机(51)、俯仰减速机组(52)、俯仰框架(53)、俯仰角编码器(54)、俯仰从动轴(55),仰伺服电机(51)、俯仰减速机组(52)同轴串联安装,俯仰减速机组(52)的转动轴与俯仰框架(53)固定,带动俯仰框架(53)转动,俯仰从动轴(55)与俯仰框架(53)固定,并与俯仰减速机组(52)转动轴同轴安装,俯仰角编码器(54)通过联轴器与俯仰从动轴(55)连接,进行对俯仰跟踪机构(5)转动角度的检测。
技术总结本发明公开了一种舰载四轴稳定跟踪平台,该平台包含稳定平台和跟踪平台两部分。其中稳定平台主要包含纵摇稳定机构和横摇稳定机构,使平台能够隔离舰船摇摆。跟踪平台包含方位跟踪机构和俯仰跟踪机构,用以实现对空中目标的连续跟踪。其中横摇稳定机构的旋转轴线、纵摇稳定机构的旋转轴线以及方位跟踪机构的旋转轴线呈空间十字正交排布,从而能够避免各旋转运动的角度耦合,降低了伺服控制难度。技术研发人员:王申,杨春鹏,潘加松受保护的技术使用者:中国船舶集团有限公司第七二四研究所技术研发日:技术公布日:2024/4/29本文地址:https://www.jishuxx.com/zhuanli/20240722/224171.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表